登录社区云,与社区用户共同成长
邀请您加入社区
LSTM-KAN模型结合了LSTM和注意力机制的特点。LSTM是一种特殊的循环神经网络(RNN),通过引入记忆单元和门控机制(遗忘门、输入门、输出门),有效解决了传统RNN在处理长序列数据时存在的梯度消失或梯度爆炸问题,能够捕捉时间序列数据中的长期依赖关系。而注意力机制则能够模拟人类在处理信息时的注意力分配过程,通过为不同时间步的输入数据分配不同的权重,突出重要信息对预测结果的影响。
本研究设计了一个基于LSTM的股票走势预测系统,通过深度学习分析历史数据来预测股票价格走势。系统采用前后端分离架构,实现了数据预处理、模型训练、预测及可视化展示功能。实验表明,该系统能有效预测股票关键指标,为投资决策提供支持。未来可结合更多深度学习模型和大数据技术提升预测准确度,推动金融科技智能化发展。系统架构如图3-1所示。
本研究基于LSTM深度学习模型构建了新型病毒传播风险预测系统。通过优化网络结构和超参数,整合公共卫生数据(包括确诊、死亡、康复等指标),采用数据预处理和交叉验证技术,模型展现出优异的时序预测性能。研究验证了LSTM在捕捉病毒传播动态模式方面的优势,其预测结果可为疫情防控决策提供支持。系统还包含用户管理、数据可视化等功能模块,具备良好的实用性和扩展性。尽管对突发事件的敏感性有待提升,但该研究为公共卫
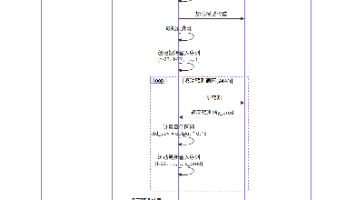
然后跟了 (3) Conv_LSTM,输出是两个(1, 48, 8, 8),保存在 hidden_states["0"] 中,hidden_states = {"0": None, "1": None, "2": None, "3": None}看起来是从y中获取数据,x变为了len 为2的list,[0]为 (1, 344, 2, 2),[1]为 (1, 176, 2, 2)(24): Conc
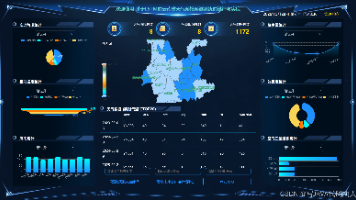
本文摘要介绍了基于LSTM的云南省天气预报预测系统的设计与实现。云南省复杂的地形和气候特征导致传统数值天气预报模型精度受限,亟需发展智能预报技术。系统采用Java语言开发,使用Spring Boot框架简化配置,MySQL数据库存储数据。LSTM模型通过学习历史气象数据的时空演变规律,构建数据驱动的预测模型,弥补传统物理模型的不足。系统实现了天气预报的精准预测功能,为省级气象部门提供智能预报辅助工
本研究设计了一个基于LSTM的股票走势预测系统,通过深度学习技术分析历史数据来预测股票价格走势。系统采用前后端分离架构,包含数据预处理、模型训练、预测分析和可视化展示等功能模块。实验表明,系统能有效预测股票关键指标(如价格、涨跌幅等),并通过图表直观呈现结果,为投资决策提供支持。该系统整合了Hadoop、Spark等技术处理海量数据,使用Django和Vue.js实现交互式可视化界面,展现了金融科
本研究基于LSTM深度学习模型构建了新型病毒传播风险预测系统。通过整合多源公共卫生数据,系统实现了从数据采集、预处理到模型训练和结果可视化的全流程功能。采用Hadoop+Spark处理大规模数据,结合Django+Vue.js框架开发可视化界面。实验表明,LSTM模型能有效预测病毒传播趋势,可视化面板可直观展示各地区确诊、死亡、恢复人数及风险等级分布。该系统为疫情监测和防控决策提供了智能化工具,未
本文提出了一种结合支持向量机(SVM)和长短期记忆网络(LSTM)的混合回归预测模型。该模型针对具有非线性特征和时间依赖性的时序数据预测问题,通过LSTM提取时序特征,再由SVM完成回归映射,兼具两种方法的优势。文章详细介绍了模型架构、实现流程和工程应用价值,包括数据预处理、特征提取、模型训练等关键环节,并强调该混合模型在电力负荷、设备健康监测等领域的适用性。模型通过MATLAB实现,具有较强的抗
本项目基于MATLAB实现CNN-LSTM混合神经网络进行多变量时间序列预测。针对工业、能源、交通等领域中多源异构时序数据的特点,通过CNN提取局部特征,LSTM建模长期依赖,有效解决传统方法在复杂非线性关系下的预测局限。项目包含完整流程:数据清洗、滑动窗口构造、网络架构设计(1D卷积+LSTM+全连接)、训练优化及评估。关键创新点包括多变量协同处理、时空特征融合以及严格的时序数据划分策略。实验结
本文介绍了基于LSTM的多变量时序预测在MATLAB中的实现方法。项目通过LSTM网络处理工业、能源等场景中的多源时序数据,解决传统方法难以捕捉非线性、长依赖关系的痛点。MATLAB提供了从数据预处理到模型部署的全流程支持。文章详细阐述了数据清洗、滑动窗口构造、网络结构设计等关键环节,并给出完整代码示例,包括归一化处理、LSTM层配置及预测效果评估。实验通过正弦波组合生成模拟数据,展示了LSTM在
本项目基于MATLAB平台,实现了一种结合LSTM与注意力机制的多变量时序预测模型。通过LSTM网络捕获长期时间依赖关系,利用注意力机制动态聚焦关键时间步和重要变量,有效提升了工业、能源、金融等领域多变量时序数据的预测精度。项目完整展示了从数据预处理、滑动窗口构造、模型搭建到训练评估的全流程,重点解决了长序列依赖衰减、变量冗余噪声干扰等挑战。实验结果表明,该模型在测试集上取得了较低的MAE、RMS
本项目基于MATLAB实现了一个结合CNN、LSTM和注意力机制的多变量时序预测模型。该模型通过CNN提取局部特征、LSTM建模长期依赖、注意力机制动态分配权重,有效解决了多变量时序预测中变量相关性动态变化、长序列信息衰减等关键问题。项目包含完整的数据预处理流程(滑动窗口构造、标准化处理)、模型架构设计(1D卷积层、LSTM层、自注意力层)以及性能评估模块(RMSE、MAE、R2等指标)。实验结果
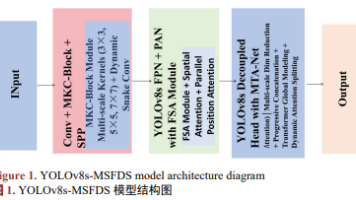
本文提出了一种基于改进YOLOv8s的棉花叶病害检测模型YOLOv8s-MSFDS,通过引入MKC-Block模块和注意力机制优化特征提取能力。研究采用履带式机器人搭载嵌入式系统进行田间检测,在数据集扩充至27,564张图像后,模型准确率达到90.9%,较原YOLOv8提升3.1%。消融实验验证了多尺度通道注意力(MTA-Net)和频域空间注意力(FSA)模块的有效性,显著提升了小目标病害的识别精
在每个时间步 (ttt遗忘门:根据当前输入和前一个时间步的隐藏状态,控制哪些来自上一个时间步的记忆单元信息需要被保留或遗忘。输入门:根据当前输入和前一时间步的隐藏状态,决定当前输入信息是否更新到记忆单元中,通过候选记忆生成新的信息。记忆单元状态更新:根据遗忘门和输入门的输出,更新当前时间步的记忆单元状态 (CtC_tCt输出门:根据当前的输入和记忆单元状态,控制当前时间步的隐藏状态 (hth_t
本文设计了一个基于LSTM的电影评论情感分析系统,通过深度学习模型准确分类评论情感并预测评分。系统采用ECharts、Vue等前端技术实现数据可视化,以图表形式直观展示情感分布和评分趋势。主要功能模块包括情感分析、评分预测和数据可视化,为电影行业提供多维度分析工具。该系统结合LSTM的时序处理能力和可视化技术,有效支持电影制作和研究的决策需求。
本研究实现了一个基于LSTM的电影评论情感分析系统,集数据采集、存储、分析和可视化于一体。系统采用分布式架构,通过Python爬虫获取豆瓣电影数据,利用HDFS/MySQL存储,基于Spark进行大规模分析,并通过Vue+ECharts实现可视化展示。核心功能包括:1)LSTM情感分类;2)评分预测;3)多维数据分析(影片/语言/地区/类型统计);4)模型评估(随机森林/神经网络)。系统通过交互式
本研究设计了一种基于LSTM的上市公司金融风险预测系统。通过挖掘金融数据,利用LSTM的时序处理能力提升预测准确性。研究详细介绍了系统架构、数据预处理和模型优化方法,实证验证了系统在风险识别和预警方面的有效性。系统为投资者和监管机构提供了决策支持,并探讨了应用中的技术经济可行性。未来将扩展数据源和优化算法以提升性能。该研究兼具理论价值与实践意义,有助于维护金融市场稳定。
本文探讨了基于机器学习的北京智能交通流量预测系统的设计与应用。系统通过整合多源交通数据(道路监控、交通卡口等),运用大数据处理技术和机器学习算法,实现对交通流量的实时分析和短期精准预测。研究重点包括数据采集(网络爬虫自动抓取)、清洗处理(填补缺失值、格式统一)、分析建模(分类聚类、异常预警、时间序列预测)及可视化展示(热力图、交互界面)。系统在北京的应用表明,其能有效提升交通管理效率、缓解拥堵,并
房价数据分析系统整合多源房地产数据,通过清洗、整合和高级分析技术(时间序列、回归分析、机器学习等),提供实时、准确的房价趋势分析。系统具备数据收集、预处理、深度分析和可视化功能,可生成走势图、区域对比等直观报告,支持用户自定义查询。该系统为开发商、投资者和购房者提供决策支持,帮助把握市场动态,优化房地产相关决策。
本文设计了一个基于Python和Django框架的个性化旅游推荐系统,采用MySQL数据库。系统分为用户和管理员两大模块,用户可进行旅游评论和在线交流,管理员则负责数据管理。系统旨在解决传统人工管理效率低、易出错的问题,通过规范化、简单化的数据处理提升工作效率。开发环境为Windows10,实现了旅游信息管理的现代化需求。
教育文化和娱乐类居民消费价格指数采集与分析系统是一个综合性监测平台,通过多渠道采集数据并运用先进算法进行处理分析,为决策提供支持。系统包含数据采集、处理、分析和可视化报告生成功能,采用前后端分离架构,能够监测价格变动趋势、进行区域比较和预测分析。系统通过自动化与人工结合确保数据质量,最终以图表报告等形式展示分析结果,支持用户定制化需求。图5.2展示了管理员后台功能实现界面。
本文从零搭建了一个LSTM+Attention比分预测模型,覆盖了数据采集、Elo评分计算、滑动窗口特征工程、模型设计与训练、ONNX部署的完整链路。**Elo评分**是表征球队实力的高效特征**双向LSTM+多头注意力**在序列预测上表现优异**双视角预测取均值**能平滑单边估计偏差**ONNX导出**让PyTorch模型轻松部署到生产环境足球的魅力在于不可预测——而机器学习的魅力在于,让"不可
系统包括四大核心功能模块:1. 棉花期货信息管理模块,用于收集、整理和管理棉花期货相关数据;3. 未来价格预测模块,通过LSTM算法对棉花期货未来价格进行预测,提供决策参考;4. 未来价格预测可视化分析模块,通过图表展示预测结果,帮助用户直观理解数据走势。分为管理员和用户两个角色,管理员模块包括新闻资讯管理、评论管理、棉花期货信息管理和用户管理等功能,用于对系统进行整体管理和监督;用户模块包括用户
共享单车租赁系统在城市交通中扮演着重要角色,准确预测共享单车的租赁需求对于优化资源分配、提高服务质量至关重要。深度学习模型在时间序列预测领域展现出了强大的能力。本文将基于 PyTorch 框架,利用 LSTM - KAN、BiLSTM - KAN、GRU - KAN、TCN - KAN 和 Transformer - KAN 模型进行共享单车租赁预测研究,并探讨如何通过简单修改一行代码实现不同 K
本文介绍了基于PyTorch的EMS能源管理系统AI预测服务,采用双层LSTM网络实现高精度能耗时序预测。系统核心功能包括模型训练、24小时滚动预测和性能评估,技术栈为FastAPI+PyTorch。重点阐述了LSTM的门控机制、模型架构设计(输入层→LSTM层→全连接层)、数据预处理流程(滑动窗口法创建24小时序列)以及训练预测流程。系统通过FastAPI提供训练、预测等RESTful接口,支持
如果没问题,我们就进入下一步——假如你的模型出现了以下情况,你觉得应该调大还是调小哪个参数?情况:训练集损失降到了很低(0.0001),但测试集损失很高(0.02),这说明模型 ____?过拟合🎛️ 减小— 降低模型容量,让它没法背下噪音⏳ 减小epochs— 在它"背答案"之前就停止训练(早停法)📊 增大训练数据量 — 更多数据 = 更难死记硬背🛡️ 加 Dropout 层 — 随机"关掉
本文基于5000例患者数据,构建LSTM模型预测年度医疗费用。研究通过热力图、随机森林等方法筛选出保险覆盖率、住院次数等关键特征,采用标准化处理和整数编码进行数据预处理。模型采用单层LSTM(隐藏层200)加全连接层结构,使用MSE损失函数和Adam优化器,并引入学习率衰减和早停机制。实验结果显示模型在测试集上达到R²=0.9886的优异表现,MAE和RMSE指标也验证了预测准确性。可视化分析表明
lstm
——lstm
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



 AI编程社区
AI编程社区







 AI Agent技术社区
AI Agent技术社区
 智能体开发者社区
智能体开发者社区