- @m0_57702748
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
随着6G通信与移动边缘计算(MEC)技术的快速落地,海量低时延、高可靠的物联网业务对传统地面通信架构提出了严峻挑战。在地震救援、野外勘探、应急通信等复杂场景中,地面基站易被遮挡、覆盖范围受限,终端设备因算力不足无法完成实时高清图像处理、环境感知等重型任务,传统地面MEC系统存在部署灵活性差、视距链路占比低的固有缺陷。无人机(UAV)凭借高机动性、三维空间部署的优势,可快速构建空中通信节点,但其机载
随着数字图像在军事通信、医疗影像、商业版权等敏感领域的广泛应用,图像信息安全成为亟待解决的关键问题。传统加密算法(如AES、DES)虽能保障数据机密性,但应用于图像时面临三方面固有缺陷:图像数据的高冗余性导致加密效率低下;像素间强相关性使密文仍保留统计特征;加密后的图像无法进行常规处理(如压缩、滤波)。模糊技术通过引入不确定性映射打破像素间关联,维纳滤波器则可在噪声干扰下恢复图像,二者结合为图
自主水下机器人(AUV)是深海资源勘探、水下管线巡检、海洋环境监测等场景的核心装备,其运动控制性能直接决定了复杂水下作业任务的完成质量。传统固定参数PID控制器是当前AUV运动控制的主流方案,但水下环境存在强水流扰动、水动力模型时变、载体质量随作业载荷动态变化等复杂特性,预先整定的固定PID参数很难在全工况下始终保持最优控制效果,极易出现轨迹跟踪超调量大、抗扰能力弱、动态响应滞后等问题,严重影响A
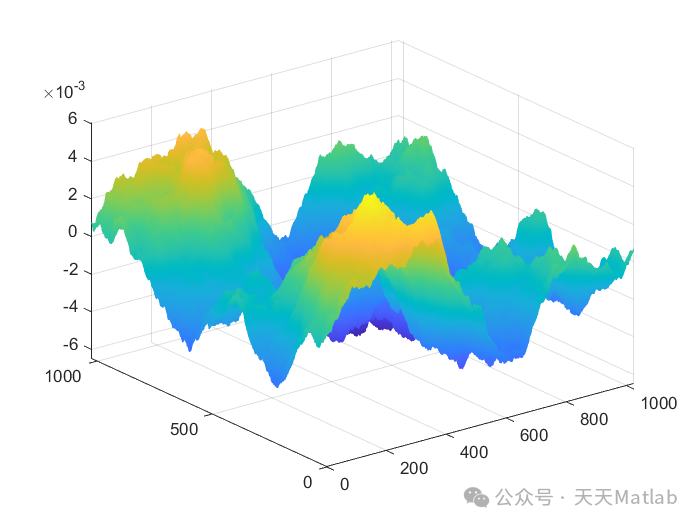
高斯光束作为一种理想化的光束模型,在光学通信、激光雷达以及激光加工等领域有着广泛的应用。然而,当高斯光束在大气中传播时,会不可避免地受到大气湍流的影响。大气湍流是一种随机的、不均匀的折射率扰动,它会引起光束的波前畸变、强度起伏以及角散射等一系列现象,严重影响系统的性能。本文将深入探讨高斯光束通过大气湍流相位屏的传播特性,分析湍流对光束的影响机制,并简述相关的理论模型和数值模拟方法。大气湍流的主要物
机器人路径规划是机器人领域的核心研究方向之一,旨在为机器人在复杂环境中寻找一条从起点到目标点的无碰撞最优路径。
一、研究背景与核心需求(一)传统避障方法的局限性人工势场法(APF)固有缺陷仅依赖 “引力(目标吸引)- 斥力(障碍物排斥)” 模型,易陷入局部最优(如多障碍物包围时 “势场陷阱”),且对动态障碍物适应性差,无法自主学习环境特征。基础 DQN 的不足经验回放采用均匀采样,忽略高价值经验(如接近障碍物的危险状态),导致收敛速度慢;纯强化学习依赖大量试错,初期碰撞率高,不适用于高安全需求场景(如无人机
单文件可完整复现实验,无额外工具箱依赖,仅需基础 MATLAB,一次性生成 5 组仿真对比图表:任务重规划时序曲线(15min 风扰、40min 禁飞区干扰,4 种规划算法对比)并发无人机数量 - 系统延迟曲线(M/M/1 事件驱动排队仿真)误码率 BER - 信噪比 SNR 曲线(BPSK 调制 + 高斯白噪声 + 算法专属干扰)信任安全合规率 vs 环境自适应得分分组柱状图可解释性指标柱状图(
本仓库提供一套可直接运行的 MATLAB 仿真程序,实现。
直流电机(有刷 / 无刷直流电机)具备调速范围宽、响应快、转矩特性好、结构成熟的特点,广泛应用于工业生产线、机器人伺服、AGV 小车、无人机云台、数控机床、电动汽车、精密输送设备等高精度调速场合;转速精准跟踪给定指令、抑制负载扰动、保持稳态误差小、动态响应快、抗干扰能力强、保证系统稳定。经典基础控制架构:传统 PID 闭环转速控制,采用转速传感器(编码器、霍尔传感器)采集实际转速,与参考转速做误差
随着无人机技术的飞速发展,其在民用和军事领域的应用日益广泛。然而,无人机的广泛使用也带来了一系列安全问题,如非法入侵敏感区域、干扰正常活动等。因此,准确地检测和分类无人机变得至关重要。传统的无人机检测与分类方法在面对复杂多变的环境和多样化的无人机类型时,往往存在局限性。基于混合数字信号处理(DSP)和人工智能(AI)的技术为解决这些问题提供了新的途径,能够显著提高无人机雷达检测和分类的准确性与效率