




- @qq_59747472
简介
关注并私信文章链接,获取对应文章源码和数据,博主简介:某大厂资深算法工程师,从事Matlab算法仿真工作10年,擅长智能优化算法、神经网络预测、机器学习、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多仿真源码、算法改进、Matlab项目和期刊发表可私信合作。
擅长的技术栈
可提供的服务
关注并私信文章链接,获取对应文章源码和数据,博主简介:某大厂资深算法工程师,从事Matlab算法仿真工作10年,擅长智能优化算法、神经网络预测、机器学习、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多仿真源码、算法改进、Matlab项目和期刊发表可私信合作。
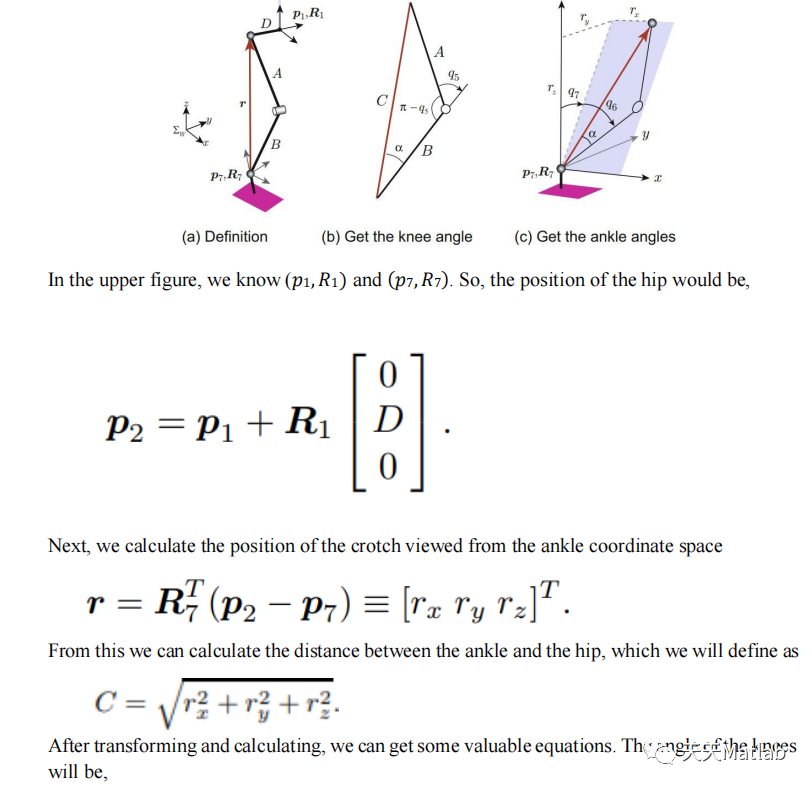
这个项目是关于利用MATLAB平台对具有6自由度(DOF)手臂、6自由度腿部和2自由度颈部的人形机器人进行编程。该研究涵盖了包括正运动学和逆运动学、步态生成、速度控制、路径规划和轨迹生成在内的各个方面。在整个项目过程中,我们实施和评估了不同的算法和技术,以实现机器人的精确和高效运动。这项研究的成果有助于人形机器人编程的进展,并支持智能和有能力的人形机器人在各种应用中的发展。人形机器人一直是科技领域
近年来,随着自动驾驶技术的发展,多车辆协同控制成为了研究热点。其中,异构车辆的协同控制由于其复杂性更具挑战。本文针对单向拓扑结构下异构车辆的控制问题,提出了一种基于分布式模型预测控制(DMPC)的方法。该方法将每个车辆的控制问题分解为局部优化问题,并通过信息传递机制实现车辆之间的协调。通过仿真验证了该方法能够有效地控制异构车辆,并能够适应不同的交通状况和车辆特性。关键词: 分布式模型预测控制,异构
随着无人机技术的不断发展和应用,无人机编队协同作业成为了无人机领域的一个热门研究方向。无人机编队协同作业可以提高作业效率、降低成本,并且可以应用于军事侦察、灾难救援、农业植保等多个领域。因此,如何实现无人机编队协同作业成为了无人机领域的一个重要问题。本文将讨论基于领航者的分布式编队控制算法实现三无人机编队协同作业的问题。首先,我们将介绍无人机编队协同作业的背景和意义,然后将详细介绍基于领航者的分布
基于粒子群算法的移动机器人路径规划,通过建立目标函数,变换坐标等对环境建模,再引入粒子群优化算法,得到全局最优路径.MATLAB仿真结果显示,此方法可有效地解决空间作业机器人路径规划及避障问题.与传统遗传算法比,该法建模容易,计算快捷,可以在不同的障碍物环境下得到不同的优化轨迹。路径规划是移动机器人导航中最重要的任务之一。路径规划技术是移动机器 人研究领域中的一个重要分支。
通过栅格法建立栅格地图作为机器人路径规划的工作环境,采用麻雀算法作为机器人路径搜索的规则。将所有机器人放置于初始位置,经过NC次无碰撞迭代运动找到最优路径,到达目标位置。为防止机器人在路径搜索过程中没有达到最大迭代次时路径大小已不发生变化而陷入局部最优,则通过对各路径上的信息素进行增减来使机器人路径搜索跳出当前值,继续搜索,直到迭代完毕,获得最优路径。麻雀搜索算法的思想来自于麻雀种群的觅食行为和反
欠驱动四旋翼无人机是典型的四输入六自由度欠驱动系统,凭借结构简单、机动灵活的优势,在巡检、测绘、竞速等场景得到广泛应用。在激进轨迹跟踪、传感器测量噪声、外部强风扰等复杂工况下,不同控制算法的性能差异极大,传统基于欧拉角的PID控制在高动态场景下极易出现姿态失稳、轨迹跟踪发散的问题,完全无法适配高复杂度作业需求。
在现代仓储物流领域,订单履行的效率和准确性至关重要。Kiva 式移动机器人系统因其高度自动化和灵活性,成为提高订单履行效率的有效解决方案。然而,多机器人在有限的仓储空间内协同工作,容易产生路径冲突。Conflict - based Search(CBS)多机器人路径规划算法专门用于解决多机器人路径规划中的冲突问题,能够优化机器人的路径,提高订单履行系统的整体性能。Kiva 式移动机器人订单履行系统
本文提出一种基于一致性算法和人工势场方法的无人机编队及其避障控制方法.通过引入与障碍物移动方向垂直的辅助牵引加速度信息,可消除局部优化解的影响.同时,为了实现无人机机群快速编队和避障,本文将有限时间一致性算法与人工势场方法相结合,提出一种编队及其避障控制方法.
移动机器人的路径规划是移动机器人研究领域中的一个热点问题。
在现代控制系统中,预测控制器对于优化系统性能、应对复杂动态变化至关重要。传统预测控制方法常依赖精确的系统模型,但实际系统往往存在非线性、不确定性等问题,使得模型难以精准构建。基于深度学习模型的数据驱动在线预测算法为解决这些挑战提供了新途径。深度学习强大的非线性映射能力能从大量数据中挖掘潜在规律,实现对系统未来状态的有效预测,从而提升预测控制器的性能。深度学习是一类基于人工神经网络的机器学习技术,通