登录社区云,与社区用户共同成长
邀请您加入社区
1.matlab暂态稳定分析程序,三机九节点系统,发电机模型采用经典二阶模型,负荷用恒阻抗模型,用改进欧拉法和matlab自带求解器ode45进行时域分析,实现微分方程和代数方程交替求解。电力系统暂态稳定仿真程序123(设计源文件+万字报告+讲解)(支持资料、图片参考_相关定制)_文章底部可以扫码。2.模拟三相对称故障,进行暂态时域分析,分析暂态过程功角曲线。3.可以分析临界切除时间。
1.matlab暂态稳定分析程序,三机九节点系统,发电机模型采用经典二阶模型,负荷用恒阻抗模型,用改进欧拉法和matlab自带求解器ode45进行时域分析,实现微分方程和代数方程交替求解。电力系统暂态稳定仿真程序12(设计源文件+万字报告+讲解)(支持资料、图片参考_相关定制)_2.模拟三相对称故障,进行暂态时域分析,分析暂态过程功角曲线。3.可以分析临界切除时间。
Transformer,训练模型,优化,price代跑增加模块训练跑通,pyTOrch算法性能提升,算法优化,微创新,残差网络,预测模型,对比预测,模型修改,优化网络,cnn训练,融合创新,ai ,python,人工智能,数据处理,调参,优化,代码解读,代码分析。2.电力电子,开关电源,单相/三相PWM整流器,单向逆变器,变频器,曲线拟合,三相整流,单向整流,逆变,隔离变换器,反激电路仿真,正激,
在现代仓储物流领域,订单履行的效率和准确性至关重要。Kiva 式移动机器人系统因其高度自动化和灵活性,成为提高订单履行效率的有效解决方案。然而,多机器人在有限的仓储空间内协同工作,容易产生路径冲突。Conflict - based Search(CBS)多机器人路径规划算法专门用于解决多机器人路径规划中的冲突问题,能够优化机器人的路径,提高订单履行系统的整体性能。Kiva 式移动机器人订单履行系统
matlab运动仿真,具有6个自由度机械臂的运动。机械臂具备自主避开障碍物,并找到最优的避障路径的功能。有学术论文➕文档代码解释,三维图纸
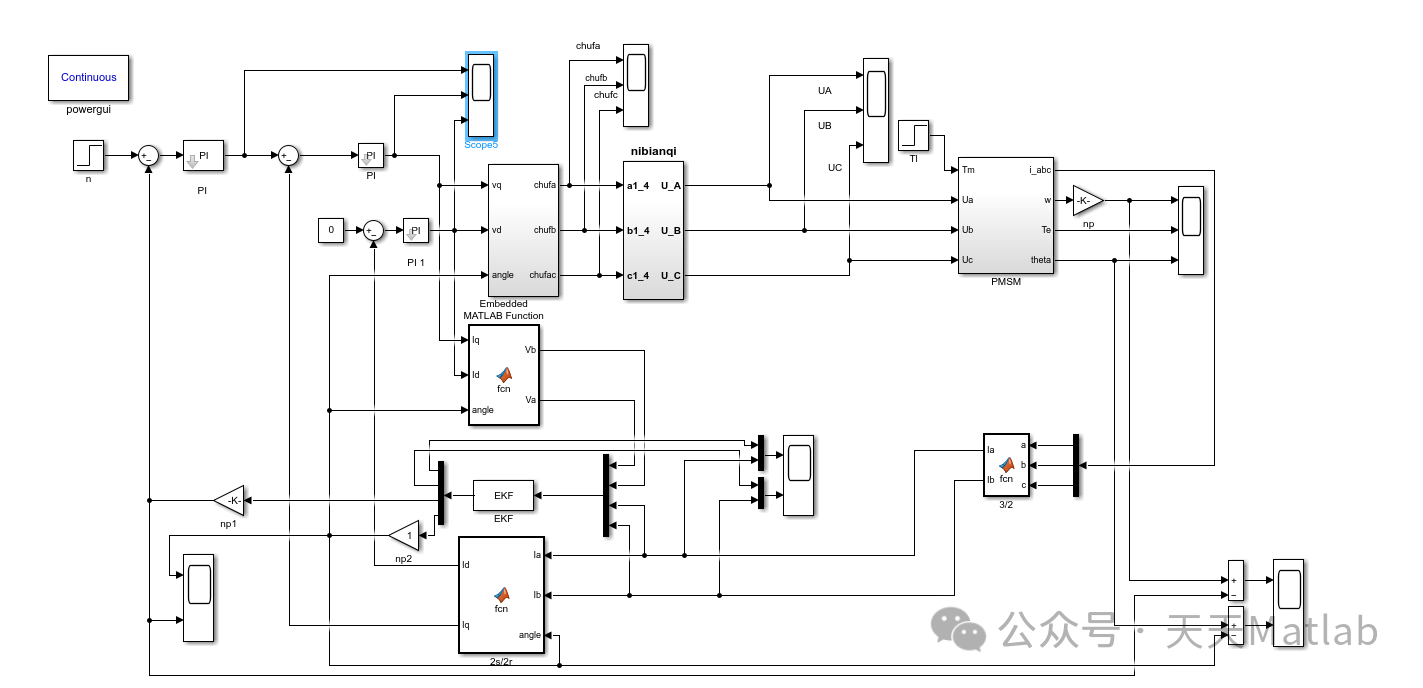
永磁同步电机(PMSM)因其高效率、高功率密度和良好的动态性能等优点,在工业自动化、新能源汽车等领域得到了广泛应用。传统的 PMSM 矢量控制策略需要使用位置传感器来获取转子位置信息,这增加了系统成本、复杂性和可靠性风险。近年来,无位置传感器矢量控制技术受到了广泛关注,其通过观测器或滤波器估计转子位置,有效降低了系统成本和复杂性。本文将介绍一种基于卡尔曼滤波的 PMSM 无位置传感器矢量控制方案。
机器人路径规划是自主导航系统的核心环节,直接影响任务执行效率与安全性。本文聚焦四种新型生物启发式算法——小龙虾优化算法(COA)、螳螂搜索算法(MSA)、红尾鹰算法(RTH)及霸王龙优化算法(TROA),通过理论分析与仿真实验对比其在二维/三维复杂环境中的路径规划性能。实验表明,COA在动态障碍物规避中表现突出,MSA在三维多目标优化中效率领先,RTH在静态高维空间收敛速度最快,而TROA通过攻击
指标传统扰动观察法(有传感器)无传感器MPPT(开路电压法)目标值硬件成本(传感器)电压+电流传感器(2个)仅电压传感器(1个)降低40%稳态追踪效率(%)99.298.5(无温度补偿)>90动态响应时间(s)0.30.8<1温度影响误差(%)<2(算法自适应)5(无补偿)→2(有补偿)<5原理:无传感器MPPT通过“开路电压测量→经验公式估算MPP→占空比调节”实现,核心是k=0.8的经验关系与
定义分布式电源(Distributed Generation, DG)是指靠近用户侧或负荷中心的小型发电系统,容量通常为几十千瓦至几兆瓦,具有分散布局、灵活接入的特点。其核心特征包括地理分散性、低传输损耗、多能源类型兼容性。主要类型可再生能源类:如太阳能光伏、风力发电、生物质能发电,依赖自然资源但清洁环保。化石能源类:如微型燃气轮机、柴油发电机,具备快速启动和稳定性,但碳排放较高。储能类:如电池储
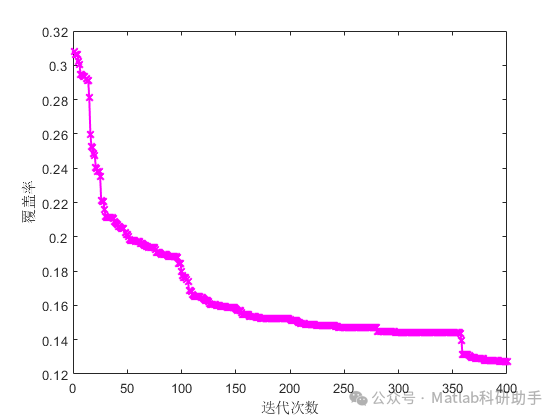
摘要:无线传感器网络(WSN)在环境监测、灾害预警、智能家居等领域有着广泛的应用。传感器节点的覆盖范围是影响网络性能的重要因素之一。本文研究了二维空间中无线传感器节点的覆盖优化问题,提出了一种基于蝠鲼觅食优化算法(MRFO)的求解方法。该方法通过模拟蝠鲼觅食的行为,对传感器节点的位置进行优化,以最大程度地覆盖目标区域。仿真实验结果表明,与传统的粒子群优化算法(PSO)相比,MRFO算法能够有效提高
1 简介移动机器人的路径规划是移动机器人研究领域中的一个热点问题。2 部分代码Xo=[0,0];%起点位置k=10;%计算引力需要的增益系数K=0;%初始化m=1;%计算斥力的增益系数,自己设定d=2;%障碍影响距离,当障碍和车的距离大于这个距离时,斥力为0,即不受该障碍的影响,自己设定n=10;%障碍个数l=0.5;%步长J=200;%循环迭代次数X_target=[10,10];X_obs=[
移动机器人的路径规划是移动机器人研究领域中的一个热点问题。
基于扩展卡尔曼滤波器的同时定位与地图构建(EKF-SLAM)是移动机器人自主导航的核心经典算法,凭借结构简洁、实时性强的优势被广泛应用于各类无人设备场景。但算法固有的状态估计不一致性问题,会导致机器人位姿与环境地图的估计误差随迭代累积、协方差矩阵失真,严重制约SLAM系统的长期运行精度与稳定性。现有研究多聚焦于算法迭代优化与误差修正,较少从系统本质的可观测性缺陷层面剖析不一致性的根源。
自主水下航行器(AUV)是海洋资源勘探、水下环境监测、海洋工程作业的核心智能装备,其运动控制精度与环境适配性直接决定水下作业的可靠性与稳定性。复杂海洋环境存在水流扰动、浮力波动、水体阻力非线性变化等不确定干扰,导致传统固定参数PID控制器难以适配动态工况,存在参数整定繁琐、抗干扰能力弱、轨迹跟踪误差大、动态响应滞后等问题。
matlab
——matlab
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区
 2048 AI社区
2048 AI社区

 DAMO开发者矩阵
DAMO开发者矩阵


 深开鸿 技术专区
深开鸿 技术专区