登录社区云,与社区用户共同成长
邀请您加入社区
欠驱动四旋翼无人机是典型的四输入六自由度欠驱动系统,凭借结构简单、机动灵活的优势,在巡检、测绘、竞速等场景得到广泛应用。在激进轨迹跟踪、传感器测量噪声、外部强风扰等复杂工况下,不同控制算法的性能差异极大,传统基于欧拉角的PID控制在高动态场景下极易出现姿态失稳、轨迹跟踪发散的问题,完全无法适配高复杂度作业需求。
# 第一步:安装与基础配置### 安装要求- 操作系统:Ubuntu 20.04/22.04(推荐)或Windows 10/11(需WSL)- 硬件:8GB RAM,独立显卡(可选,但能提升渲染效果)- 软件:Unreal Engine 4.27+(AirSIM依赖)、Python 3.7+、PX4源码### 快速安装指南(Ubuntu)## 第三步:PX4与AirSim的深度集成上述Python
本文提出一种基于一致性算法和人工势场方法的无人机编队及其避障控制方法.通过引入与障碍物移动方向垂直的辅助牵引加速度信息,可消除局部优化解的影响.同时,为了实现无人机机群快速编队和避障,本文将有限时间一致性算法与人工势场方法相结合,提出一种编队及其避障控制方法.
1 简介本文提出一种基于一致性算法和人工势场方法的无人机编队及其避障控制方法.通过引入与障碍物移动方向垂直的辅助牵引加速度信息,可消除局部优化解的影响.同时,为了实现无人机机群快速编队和避障,本文将有限时间一致性算法与人工势场方法相结合,提出一种编队及其避障控制方法.2 部分代码clcclearallcloseall%%%%一阶算法仿真 非完整型约束%%% 设置好重心偏移量和gama,权重,基本可
随着物理 AI 从概念验证迈向实际部署,MediaTek Genio Pro 5100 以高性能硬件、开放的软件生态以及对先进 AI 模型的支持,为机器人和无人机提供关键技术基础。为了提升系统设计的可靠性与制造效率,Genio Pro 5100 支持并排式 LPDDR5x,并具备丰富的扩展能力,可提供 PCIe Gen 4、USB、双 2.5GbE 以太网以及多种标准接口,灵活扩展与系统集成,可满
本文介绍了飞行控制器姿态解算的核心算法实现过程,重点讲解了基于Mahony滤波算法的8个关键步骤:1)加速度计数据归一化;2)从四元数提取重力分量;3)计算重力测量值与估计值的误差;4)误差积分补偿陀螺漂移;5)互补滤波融合数据;6)解四元数微分方程;7)四元数归一化;8)将四元数转换为欧拉角。文中提供了完整的C语言实现代码,并建议使用磁力计改善偏航稳定性时的选型和校准注意事项。配套提供了B站视频
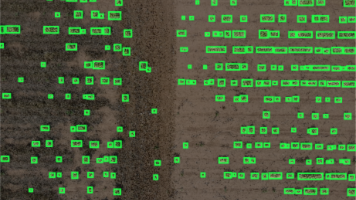
智慧农业之无人机航拍棉花出苗率识别数据集 农作物田间杂草识别图像数据集 无人机农作物小目标识别数据集 detr算法第10240期
智慧农业之玉米授粉雄穗检测数据 无人机航拍巡检数据集 航拍玉米雄穗 玉米出苗率 授粉率识别图像数据集 无人机与智慧农业10301期
智慧农业之无人机田间地野航拍巡检农作物出苗率识别 玉米目标检测数据集 无人机航拍小目标数据集 玉米出苗率数据集 玉米生长检测数据集 yolo格式数据集
4.讲解two-stage(二阶)检测模型框架,RCNN, Fast RCNN, Faster RCNN等框架的演变和差异。1.现有几个优秀模型结构的演变原理,包括AlexNet,VGG,googleNet,ResNet,DenseNet等模型。(2)讲解数据集的制作过程,包括数据的存储和处理,并使用PyTorch加载数据集。3.讲解目标检测模型的评估方案,包括正确率,精确率,召回率,mAP等。(
智慧高速公路巡检数据集 高速公路监控巡查 智能交通路况分析 道路安全分析 无人机高速巡检 道路抛洒物识别第10431
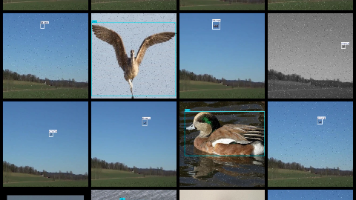
该数据集包含4025张640x640分辨率的空中飞行物图片(VOC+YOLO格式),涵盖气球、鸟类和无人机3个类别,共4329个标注框。数据集包含jpg图片及对应的xml和txt标注文件,其中气球618框(615张图)、鸟类1695框(1394张图)、无人机2016框(2016张图)。数据经过增强处理,需自行划分训练/验证/测试集。标注采用矩形框形式,但不对模型精度作保证。
本项目是一套基于深度学习YOLOv8模型开发的,聚焦安防场景下危险刀具识别需求,适配图片、视频、摄像头实时检测等多场景,配套完整数据集、训练模型、可视化界面及代码,可快速部署落地。g。
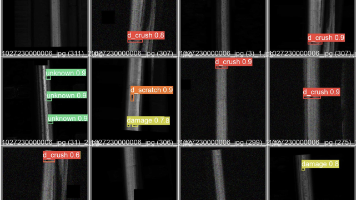
本项目聚焦铁路轨道安全巡检场景,基于YOLOv8深度学习框架,构建一套完整的铁轨缺陷检测解决方案。涵盖专用数据集构建、模型训练优化、PyQt5可视化界面开发全流程,可实现铁轨8类缺陷的精准识别,适配工业质检、科研实验等场景,助力铁路巡检智能化升级。
7 月 26 日,中国气象科学研究院联合深圳市国家气候观象台完成国内首次蜂群无人机台风过境全过程立体观测,如同为台风实施全方位空中 CT 探测,多层次捕捉低空温度、湿度、风场、湍流等气象数据,有效补齐传统气象观测难以覆盖的近海低空观测盲区。其自研无人机锂电可实现 40A 峰值大电流放电,毫秒级响应无人机动态变化的动力需求,即使在强风、乱流等恶劣环境下,也能保持电压稳定、动力持续输出,支撑无人机高强
目前迪生正在为具身智能机器人研发提供高精度光学动作捕捉全套解决方案,产出高保真基准运动数据,助力虚实仿真校准、模仿学习训练与整机性能验证,夯实人形机器人迭代进化的数据底座,持续推动具身智能技术走向规模化落地应用。但仿真世界与现实存在天然鸿沟,需要真实物理基准数据校准虚拟场景,这也正是动作捕捉不可或缺的原因。,高精度光学动作捕捉系统提供精准基准校验数据,用于在轨服务机器人资质认证,保障其在精密卫星部
本文介绍了四旋翼飞行器姿态控制中的坐标系定义与姿态表示方法。主要内容包括:导航坐标系(NED)与机体坐标系的定义及其转换关系;欧拉角表示法及其万向节锁问题;旋转矩阵的构建与应用;四元数的定义及其在姿态解算中的优势。文章还讨论了如何通过互补滤波融合传感器数据,解决陀螺仪积分漂移问题,实现高精度姿态解算。这些方法为飞行器的稳定控制提供了理论基础,其中四元数因其计算高效、无奇异性等特点成为现代飞控系统的
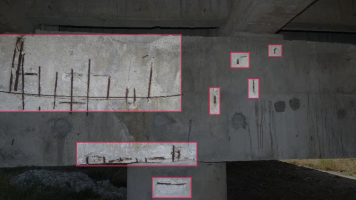
数据集以无人机航拍图像为核心,单类别聚焦桥梁裂缝检测,数据场景、形态、角度覆盖全面,分辨率平衡精度与效率,为桥梁健康监测自动化提供高质量基准数据,支撑算法开发、验证与落地应用。
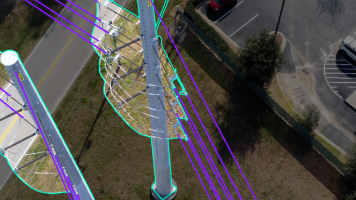
航拍电力设施图像分割数据集(Power line)
本文探讨了轻量级YOLOv5n模型在无人机智能巡查中的应用,特别针对乡村罂粟花非法种植的实时检测预警系统。通过深度可分离卷积和针对性数据增强策略,YOLOv5n在保持高精度的同时大幅降低计算量,实现25FPS以上的实时检测性能。系统采用边缘-云端协同架构,在实际测试中效率提升20倍,准确率达100%。
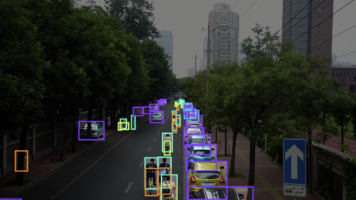
注意数据集中目测大约有20%图片并不是无人机视角图片,主要是为了增强模型无人机在低空飞行识别能力,此外图片角度比较多,基本涵盖0-90度视角,距离大部分集中在10-50米左右。标注类别名称(注意yolo格式类别顺序不和这个对应,而以labels文件夹classes.txt为准):["Fire","Human","Vehicle"]数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的
无人机航拍数据集 #道路病害检测 #目标检测数据集 #智能交通 #道路维护 #城市基建 #计算机视觉 #交通设施识别 #深度学习数据集。
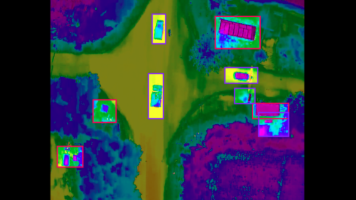
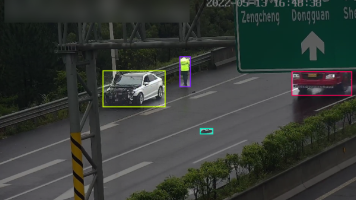
智慧无人机航拍巡检数据集 红外行人车辆识别数据集 行人车辆计数图像识别 红外建筑物识别 夜间低光环境下视觉感知算法 安防、交通等领域红外视觉任务 第10355期
计算机视觉研究院主要涉及深度学习领域,主要致力于目标检测、目标跟踪、图像分割、OCR、模型量化、模型部署等研究方向。研究院主要着重”技术研究“和“实践落地”。SSMA-YOLO:一种轻量级的 YOLO 模型,具备增强的特征提取与融合能力,适用于无人机航拍的船舶图像检测。LMAD-YOLO 是目前无人机航拍车辆小目标检测的优质方案,精度高、重量轻、泛化强,工程落地价值拉满!ViT-YOLO:基于Tr
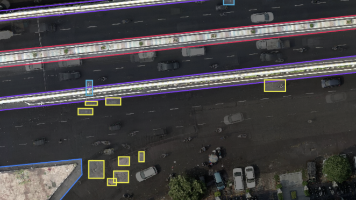
面向无人机空中巡检场景,提供数据,聚焦行人、小汽车、卡车、摩托车等多类目标识别,适用于交通监控、城市规划、安防巡查、应急救援等智能化任务开发。
解决传统桥梁巡检效率低、风险高、隐蔽损伤难发现的痛点,为桥梁自动化检测、健康监测、智能管理提供关键数据基础,助力提升桥梁安全水平、降低养护成本、提高管理效率。
无人机
——无人机
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区



 DAMO开发者矩阵
DAMO开发者矩阵



 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区






 科技大视野开发者社区
科技大视野开发者社区


 魔珐星云开发社区
魔珐星云开发社区
 AI编程社区
AI编程社区