




- @FEISILAB_2022
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务

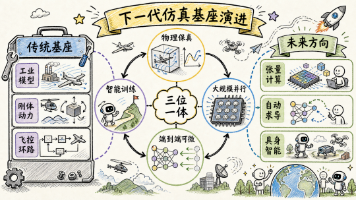
面对这一行业级的硬核难题,飞思实验室以RflySim工具链为依托,推出底层重构方案:将工业级Simulink动力学模型逆向工程为纯PyTorch张量实现,全面拥抱GPU大规模并行计算与端到端可微仿真,在单张消费级RTX 3070显卡上完成了对原生DLL方案39.7倍的吞吐量碾压,并在保真度上反超Simulink原生白盒模型,为具身智能算法的工业落地铺平了一条真正属于“GPU时代”的高速公路。编译后
近年来,以大模型、机器人与无人系统为代表的新一轮人工智能技术浪潮加速推进,逐渐成为全球科技竞争的焦点。不同于传统人工智能聚焦信息处理的研发思路,具身智能强调智能体在真实物理环境中的感知、决策与行动闭环,通过环境交互实现自主学习和任务执行,是人工智能从数字世界迈向物理世界的重要路径。从人形机器人进入工厂实训,到四足机器人参与复杂环境作业,再到无人机自主完成侦察、搜索与协同任务,具身智能正在加速走出实

近年来,以大模型、机器人与无人系统为代表的新一轮人工智能技术浪潮加速推进,逐渐成为全球科技竞争的焦点。不同于传统人工智能聚焦信息处理的研发思路,具身智能强调智能体在真实物理环境中的感知、决策与行动闭环,通过环境交互实现自主学习和任务执行,是人工智能从数字世界迈向物理世界的重要路径。从人形机器人进入工厂实训,到四足机器人参与复杂环境作业,再到无人机自主完成侦察、搜索与协同任务,具身智能正在加速走出实
等核心领域,不断强化系统实时感知、快速决策、精准执行、自适应进化的全链条能力,推动无人系统从单体自主作业向分布式跨域集群智能跃升,全力构建自主可控、安全可靠、国内领先的低空智能无人系统技术与产业生态,为国家应急体系现代化、低空经济高质量发展与国防智能化建设提供核心支撑。低空经济与智能无人系统已成为国家科技创新与产业升级的核心赛道。蜂群单体共享态势、分工观察、协同决策、联合行动,可完成编队飞行、协同

选手将飞机放到起飞点H内,裁判开始口令发出后,飞机需要从起飞点上起飞,循迹小车开始按照地面圆形线条循迹,围绕直径为1米的圆做圆周运动,同时飞机穿越左边的一排柱子、再按照图示轨迹穿越中间的两个边长为1米的方框,最后飞至循迹的小车上方,识别到小车上面二维码上的数字并传至地面端,即可完成比赛。在一个5米*9米的模拟地下仓库中进行无人车+无人机的空地一体化常规巡检,小车进行固定轨迹的地面巡检,无人机进行空

中国机器人及人工智能大赛是由中国人工智能学会主办的全国性学科竞赛,属于全国高校学科竞赛A类赛事。卓翼飞思将持续承办第二十七届中国机器人及人工智能大赛—机器人任务挑战赛(无人机空地协同),现报名渠道已开启,欢迎咨询!

第27届中国机器人及人工智能大赛报名流程详细版

注意添加队员、老师信息, 包括姓名、学校、身份证号、手机号、邮箱等信 息确保无误,以便审核和联系,省赛前以及之后将不可更改。继3月份中国机器人及人工智能大赛通知以来,已有16个省份发布比赛通知,其它省份将陆续开启,以下是各省开赛通知。可以查看已经报名的项目的状态, 提交报名后, 当前阶段显示为“提交报名 信息”,审核状态显示“待审核”。输入报名手机号、图形验证码, 点击获取验证码, 等待接收手机短

提出了一种使用单目摄像头在室内走廊环境中进行视觉导航的新方法,该方法依赖于名为Res-Dense-Net的新型卷积神经网络。即使在视觉线索有限的环境中也能在估计无人机的位置和方向方面实现高精度,显着增强了无人机在各种应用中的能力。
