- @dong2010hong
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
它主要通过第一人称视角(FPV)进行操作,配备四个电机和相应的飞控系统,使其具有极高的飞行自由度和速度。然而,由于其操作的复杂性和安全风险,新手飞手在入门前需要经过充分的学习和准备,并在专业人士的指导下逐步提高飞行技能。飞手须对自己的飞行器负责,确保在安全的环境和条件下操作,避免对人员和财产造成伤害。2. 低成本:相比于其他类型的无人机,穿越机的制造成本较低,且多采用DIY装配的方式,便于个性化定

随着技术的不断进步和创新思维的应用,无人机巡检技术将为石油管道的安全管理提供更加高效、便捷、灵活的支持。无人机在石油管道巡检中的应用,以其高效、便捷、灵活的特点,为石油管道的安全管理提供了有力支持。3. 标准化与规范化:随着无人机巡检技术的不断成熟和应用场景的拓展,相关标准和规范将逐渐建立和完善,以推动无人机巡检技术的健康发展。1. 智能化:未来无人机巡检将更加注重智能化技术的应用,如人工智能、大

灵活性:UTC是一个专门为无人机驾驶员提供培训的机构,其执照的考试和评估标准相对较为灵活,可以根据不同的岗位需求进行定制。- 适用范围:持有AOPA执照的人可以在国内范围内执行一定的商业无人机任务,且可以在全球范围内使用(具体需视各国法律而定)。- 对于喜欢无人机模型运动的爱好者来说,ASFC执照是一个很好的选择,可以让他们在法律允许的范围内享受飞行的乐趣。- 考试难度:相对于其他几种执照而言,A
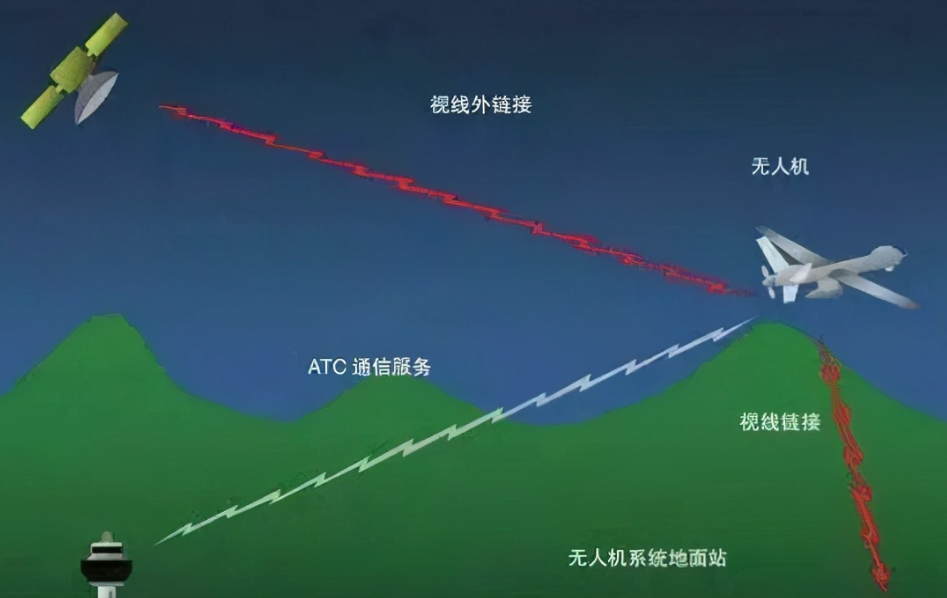
不同的频率和波长决定了电磁波的传播特性,如衰减、衍射、反射和折射等。电磁波传播过程中受到地形、建筑、气候等多种因素影响,需要进行合理的规划和优化,以保证信号的质量和覆盖范围。调制是将信息信号转换为适合在无线信道中传输的已调信号的过程,解调则是已调信号还原为信息信号的过程。同时,干扰控制也是无线通信中的重要环节,包括干扰检测和抑制、抗多径干扰和抗干扰编码等,以减小干扰对通信质量的影响。无人机数据链作
这种“物美价廉”的特性使得更多的企业和开发者能够使用DeepSeek的AI技术,推动了AI技术的普惠化。同时,DeepSeek的机器学习技术还可以根据历史数据和实时监测结果,预测作物的生长趋势和病虫害发生概率,为农民提供预防性的植保建议。DeepSeek,作为一家专注于深度学习与人工智能技术研究的企业,近年来在AI领域取得了显著成果,尤其在无人机智能作业技术方面展现了其大模型的强大能力。随着技术的

同时,无人机采用高强度的轻量化材料制成,既保证了机体的坚固性,又有效减轻了整体重量,从而提高了无人机的载重能力。这些传感器能够实时感知无人机的飞行状态,并将数据传输给飞行控制器,由飞行控制器进行精确计算和控制,使无人机能够按照预设的航线进行飞行,并实现对载重的精确控制。1. 电动机与电池:无人机采用高效的电动机和大功率电池,能够提供稳定的动力输出,保证无人机能够持续飞行和重载。2. 故障检测与自诊

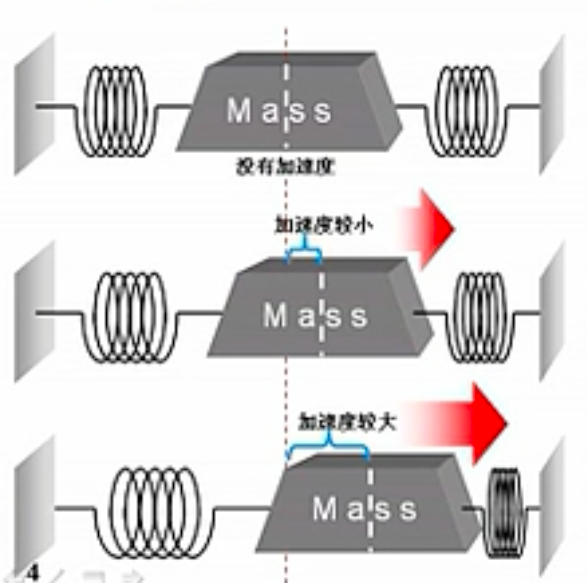
主要目的是为陆海空三大领域提供实时、全天候和全球性的导航服务,并用于情报搜集、核爆监测和应急通讯等一些军事目的,经过20余年的研究实验,耗资300亿美元,到1994年,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。无人机飞控是指无人机的飞行控制系统,主要用于保持无人机的正常飞行姿态。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信
同时,无人机还可以通过搭载的化学传感器等设备,检测空气中的有害物质浓度,为救援人员提供安全保障。在灾区交通受阻或地面救援力量难以到达的情况下,无人机可以迅速将急需的物资,如食品、水、急救药品等,投送到灾区,为灾区居民提供及时的救援支持。在地震、山体滑坡、洪水等自然灾害中,无人机可以通过搭载的生命探测仪、红外热成像仪等设备,对灾区进行人员搜救和定位。无人机可以在复杂的地形和障碍物中快速飞行,寻找被困
DJI O3 天空端,DJI Goggles 2,DJI PFV 遥控器2,iFlight Nazgul5 V3 5寸 机架,SpeedyBee F405 V3 飞塔,Tmotor P2207 无刷电机 4个,桨叶,D6 Pro 充电器,6S电池,TS101 电烙铁,广崎焊锡丝,螺丝盒,螺丝刀,数字万用表。图传设备则要确保传输稳定,延迟低。焊接小技巧:先给焊点上足够的锡,同时给线缆要连接的地方也上
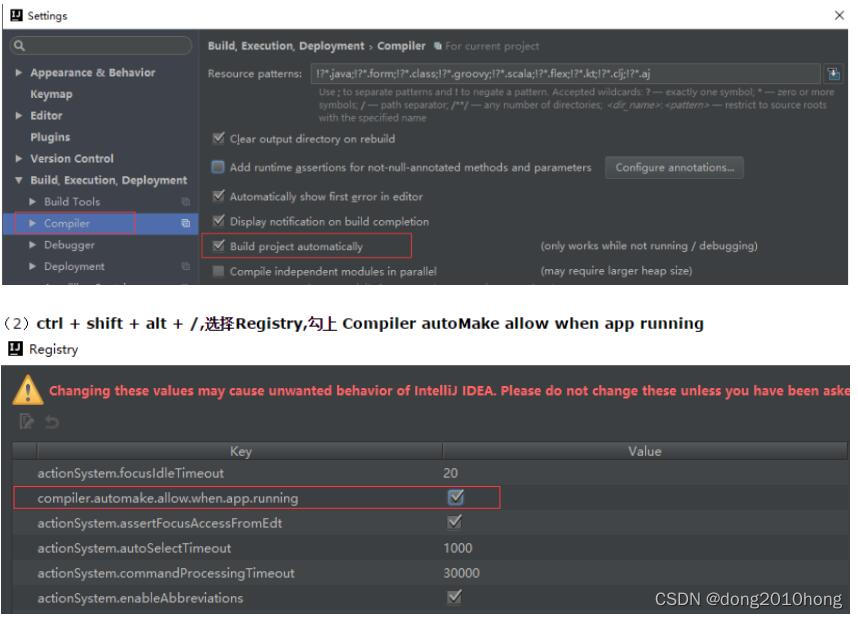
使用SpringBoot开发的时候,修改完程序之后,需要手动点击重启,才能让修改生效,比较麻烦,也占用了更多的时间。#classpath目录下的WEB-INF文件夹内容修改不重启。其实可以通过一些插件,实现修改之后的热加载,并且只加载修改部分,从而也提高了效率。当我们修改了java类后,IDEA默认是不自动编译的,而。设置WEB-INF下的jsp修改不需要重启。第一步:pom.xml添加依赖。这样