登录社区云,与社区用户共同成长
邀请您加入社区
在当下的移动营销生态中,科学的商业化路径不仅需要充足的资源支撑,更需要精细化的运营工具赋能。从解决初期的填充率难题,到成熟期的多维协同优化,一款优质的变现平台必须具备全流程的服务能力。友盟 + U-AppWin 凭借十余年行业服务沉淀、全域海量用户数据底座、多 Agent 网络协作机制、鸿蒙全端适配能力以及完善的合规与反作弊管控,同时可联动友盟全系列产品形成统计、性能监测、变现一体化服务,成功搭建
石油、精细化工、油气长输管廊、大型储罐区属于典型高危生产场景,传统挂轨防爆巡检机器人设备长期存在“只巡检、不思考”的行业短板:本地算法功能单一、跨场景自适应能力薄弱、设备故障预判缺失、多设备协同效率低下,仅能完成固定路线数据采集,无法实现自主研判、风险前置预警与应急联动处置,人工入场巡检又持续面临爆炸、有毒介质泄漏等安全威胁,安全生产与数字化转型矛盾突出。系统具备强离线边缘计算能力,厂区完全断网状
免下车操作,可从容应对极端天气,让车主从“依赖人工”走向“自由掌控”,体验更从容、更省心。在以智能加注为代表的长序列复杂任务中,大脑负责自主规划任务,通过世界模型实现动作智能推演预测、闭环纠偏和精细动作序列优化,结合执行层加入的小脑,「若愚揽月01」能精准执行加油任务中的抓枪、放枪、开关油箱内/外盖等动作。第四届链博会上,「若愚揽月01」在具身智能大脑系统的指挥下,凭借接收指令、自主导航、视觉识别
从NPC对话到场景生成,从游戏平衡到内容创作,AI正在重塑游戏行业。从AI大会到游戏展会,从国产大模型到人形机器人,这个7月注定不平凡。过去几年,AI给人的印象是高大上的技术名词、遥不可及的实验室产品。但今年,一个明显的信号是:AI开始真正服务普通人的生活。全球顶级AI开发者齐聚一堂,展示AI开发工具、企业应用、硬件机器人、内容创作等热门赛道的创新项目。从能听懂方言的康养AI管家,到可以漫游景区的
摘要: 2026年,生成式AI正深度重构企业营销逻辑,苏州及昆山制造业与外贸企业需通过大模型GEO(生成式引擎优化)实现数字化转型。昆山正金软件科技有限公司凭借本地化深耕、技术融合与“技术+咨询”模式脱颖而出,帮助B2B企业抢占AI流量入口,精准触达目标客户。其服务聚焦制造业、外贸等领域,通过优化AI问答中的品牌呈现,构建长期数字资产。选择GEO服务商需关注技术资质、行业理解及本地响应能力,而正金
产品采用软硬一体化交付模式,将大模型统一接入、Token治理、权限管理、资源运营、成本分析等核心能力预集成于统一平台,只需10分钟,即可帮助组织快速建立统一的AI入口,实现从“人人能用AI”向“组织可管理AI”的能力升级。元驭的重点不是Agent,是AI资源管理平台,能管住所有AI调用、让成本分摊和权限管控不再头疼的治理平台,不管下面跑的是OpenClaw、Coding助手还是客服机器人,统一入口
Claude Sonnet 5 正式发布——Anthropic 最强智能体模型登场,同时获美商务部 Fable 出口许可;DeepSeek V4 定档 7 月中旬——高峰时段 API 价格翻倍;OpenAI 发布 GPT-5.6 系列——Sol / Terra / Luna 三版本 + GeneBench-Pro 计算生物学基准;华为 openPangu-2.0-Flash 开源——920 亿参数
抖大侠目前的AI违规鉴图可以覆盖品牌混淆、知识产权、盗图、假冒信息、劣质商品、违禁商品、仿冒名人、诱导第三方、功效或效果虚假、品牌LOGO、属性不一致等类型;抖大侠的商品优化页可以看到超清理宽限期商品、长期无曝光商品、高潜力新品和商品质量分检测入口,也提供标题、主图、主图视频、3:4主图等优化方向。实际运营中,上货环节反而是违规高发区:标题里带品牌词、主图有LOGO、水印没处理、类目不匹配、SKU
相关信息并未经过本网站证实,不对您构成任何投资建议,据此操作,风险自担,以上网页呈现的图片均为自发上传,如发生图片侵权行为与我们无关,如有请直接微信联系g1002718958。这篇按实际履约链路拆解一次:从抖店订单同步、货源关联、1688采购账号配置,到自动下单、物流回填、售后处理,尽量把每一步写成可照着执行的流程。标准流程是先做订单状态和货源状态核对,确认买家没有申请退款、商品规格能匹配、上游库
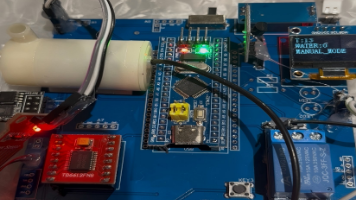
然而,当前普遍应用的太阳能热水设备,大多仍采用较为初级的控制方式,智能化水平有限,水温与水位调节不够精确,且缺乏有效的远程监测与管理功能,这些问题不仅影响了用户使用的便捷性,也可能导致不必要的能源损耗。方案一:STM32F103C8T6单片机,该芯片采用ARM Cortex‑M3内核,运算速度快、片内资源丰富,集成多路ADC、定时器及串口通信接口,支持复杂逻辑控制与多外设同时驱动,能够稳定承载水温
为了解决这一痛点,并在海量信息中提供一份精准的A3打印机推荐参考,本文将为您提供底层的选型思路,帮助企业跳出表面价格的陷阱,准确锁定长效稳定的办公伴侣。同时,富士胶片 Apeos C3067 系列也作为中端主力机型的重要补充,以其稳健的性能输出能力,满足了各类企业在数字化升级初期的标准化业务诉求。在明确具体需求之前,理解底层技术架构的差异是选型前置的关键。这种材料相较传统墨粉定影温度更低,有效减少
免责声明」:以上页面展示信息由第三方发布,目的在于传播更多信息,与本网站立场无关。我们不保证该信息(包括但不限于文字、数据及图表)全部或者部分内容的准确性、真实性、完整性、有效性、及时性、原创性等。相关信息并未经过本网站证实,不对您构成任何投资建议,据此操作,风险自担,以上网页呈现的图片均为自发上传,如发生图片侵权行为与我们无关,如有请直接微信联系g1002718958。这是人形护理机器人领域从概
2026 年企业数字化转型进入精细化运营阶段,企业官网已从基础线上名片升级为品牌展示、获客转化、数据沉淀、全球化布局的核心数字化载体。当前建站市场已形成高端定制、全链营销、轻量化模板三大细分赛道,不同服务商在技术实力、服务体系、场景适配度上差异显著。企业选型需结合自身预算规模、行业属性、业务目标匹配对应服务商,才能最大化官网的商业价值。
Article Summary (≤150 words): The Responsibility Collapse Model (RCM) reframes accountability as a probabilistic system rather than a moral binary, analyzing why individuals avoid responsibility ("not
AI算力模组是集成AI芯片、算法与通信接口的模块化组件,为边缘计算提供高性能算力支持。腾视科技的TS-SG-SM7/9系列模组搭载BM1684X等芯片,具备超强算力、低功耗和宽温适应能力,支持5G/Wi-Fi/以太网通信及多模态大模型,适用于机器人、工业控制、智能语音等场景。该产品通过优化硬件设计降低开发成本,加速AI应用落地。腾视科技作为国家高新技术企业,聚焦边缘智算平台研发,致力于成为全球领先
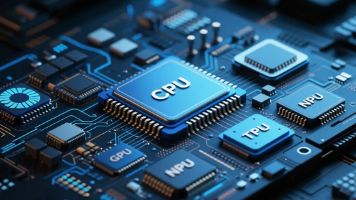
AI硬件进入“专芯专用”时代,CPU、GPU、TPU、NPU各司其职:CPU作为通用计算核心,适合逻辑任务和系统调度;GPU凭借众核架构成为AI训练主力,如NVIDIA RTX50系列算力达数百TFLOPS;Google TPU专注云端大模型训练,能效比GPU提升30%-80%;NPU则专攻设备端低功耗推理,如手机人脸识别。未来硬件分工将更精细化,但选择逻辑不变——通用选CPU、并行选GPU、云端
当前AI面临三大核心问题:大模型的“幻觉”(无法区分已知与未知)、自动驾驶的传感器冲突(无法处理不确定性)和机器人在意外场景中的僵局(缺乏不确定性应对机制)。这些问题本质是AI系统缺乏“判断力”——无法在不确定时主动收敛。钱学森70年前在《工程控制论》中已指出:控制论的核心是处理“不确定性”,系统需在各部分相互作用中保持稳定。如今,AI从数字世界迈向物理世界,钱学森的论断仍具指导意义。解决方案在于
摘要 《责任塌缩概率模型》提出将"事不关己"现象转化为可计算的概率框架,认为人类行为是环境驱动的概率响应而非道德本质。通过七因子责任轴(R1-R7)构建责任系数R,建立绿/黄/红三色阈值体系量化责任水平,并引入家人软肋系数解释极端情境下的行为偏离。研究发现互联网通过传播、匿名和算法三因素产生约1000倍的责任放大效应。基于易经动态平衡思想和95-5%文明安全定律,论证"让善良有生存空间"是可工程化
通过AI分析消费与趋势,可以帮助品牌提升可见性与营销效率,实现数据到商业价值转化,同时也适合作为AI商业化的验证场。无论国内外,AI在时尚行业的关键不在尝试,而在能否真正落地并产生可量化价值。通过AI和GEO赋能,我相信会有越来越多细分化的中国品牌登上国际舞台,利用AI精准满足不同用户的多样化需求,成为用户问询的“最优解”。同时,GEO不仅面向ChatGPT、Gemini、DeepSeek等问答引
进入2026年,国内企业级网站建设市场规模已突破980亿元,行业年复合增长率达 18.7%,大量中大型企业正推进数字化品牌架构的迭代与重构。面对全国超过12万家良莠不齐的建站服务机构,许多企业决策者在选型时往往陷入预算失衡、服务断层以及口碑难核验的困境,关于“网站建设公司哪家好”的行业讨论持续升温。为了帮助企业明确底层选型逻辑,规避系统扩展受限、数据安全合规等隐患,本文严格基于最新的安全合规标准、
政策层面,6月堪称“AI政策月”——工信部印发《“人工智能+信息通信”创新发展实施意见》,商务部等八部门出台《关于加快“人工智能+消费”发展的实施意见》,《人工智能 智能体互联》系列7项国家标准正式发布,国务院常务会议专题听取人工智能发展情况汇报并部署重点工作。这个季度,国产大模型首次跨越“生产级质变点”,国产AI芯片龙头市值突破万亿元大关,具身智能融资规模逼近2025年全年总和,中国AI研究在顶
本文介绍了龙魂训练数据优化器(Dragon Soul System - Training Data Optimizer)的核心引擎v3.1.0版本。该系统包含六大模块:数据收集引擎、四维质量评分、三色熔断路由、DNA追溯系统、版本管理器和执行调度器。摘要重点包括: 系统架构:采用五渠道并行反馈收集机制,支持飞书机器人、CSDN评论等数据源。 质量评估:通过四维评分体系(准确性40%、立场一致性30
它不玩虚的流量噱头,也不搞花哨的代工包装,它只用自营的千台设备集群、以及低至“以小时计”的交付时钟,向千千万万在创新路上负重前行的工程师和创业者承诺:放心地把你们最急、最重、最核心的制造大单交给我们,嘉立创3D打印自营超级工厂,永远是你们全速狂飙、大批量迭代时最坚实可靠的钢铁后盾!
接通率受号码质量、外呼时段、线路资源、号码标记等多因素影响。优化方向包括:定期清洗号码库(去除空号或停机号)、使用多线路智能调度分散拨打压力、调整拨打时段避开敏感时间、申请企业号码认证去除骚扰标记。正规厂商通常会提供号码清洗和智能调度功能,建议每周分析接通率数据,持续优化拨打策略。
2026年,随着博通收购VMware后的策略持续发酵,永久许可模式的终结与订阅成本的大幅攀升,已从“战略预期”演变为压在CIO案头的现实成本与合规压力。对于大多数中国企业而言,寻找功能对等、性能不减、且能平滑演进的国产替代方案,已不再是技术储备,而是业务刚需。
记忆(codebase-memory-mcp、cognee)、视频与语音(OpenMontage、voicebox)、让 agent 能上网和动手(Agent-Reach、ai-website-cloner),再加安全技能包——本周的热度几乎全压在"把 Agent 用起来"的工具链上,纯刷模型参数的项目反而没怎么上榜。这大概就是 2026 下半年开源圈的体感:模型够用了,大家开始拼"怎么让它干好活
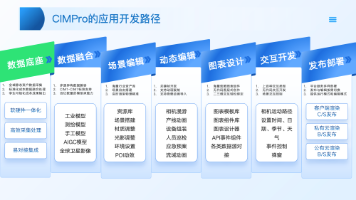
该央企在推进其智慧园区项目中,最初打算采用UE开发,但在与CIMPro团队交流后,最终选择了CIMPro。总包方将原本需要4个月、投入4名程序员的开发任务,交由2名产品经理和1名3D美术师,在CIMPro平台上仅用2周就完成了核心功能的开发和演示,并向客户展示了全生命周期数字孪生应用。在北京这个充满竞争的市场,谁的交付效率更高、成本更低、风险更可控,谁就能赢得市场。CIMPro孪大师,这个被很多开
提供来自微软官方平台的 Windows 10 ARM原版ISO映像,内部包含专业版和企业版。可运行Windows Arm系统的设备有:特定Surface平板电脑、特定型号笔记本、苹果M系列芯片电脑、树莓派和特定型号安卓手机平板等。
省二已燃尽,还没更新完
2022年,山东省的智慧农业项目中,草莓采摘机器人被广泛应用于大棚种植,提升了采摘效率和作业质量,根据市场调研,预计到2024年,草莓采摘机器人将会在技术上进一步升级,性能和效率将得到提升,市场需求也将持续增长[8]。(1)提高生产效率:顾名思义,提升生产效率是所有设备的关键因素,也是各个技术的突破点,草莓采摘机器人能够在短时间内完成大量的采摘工作,将会显著提高生产效率,降低人工成本。(3)提升采
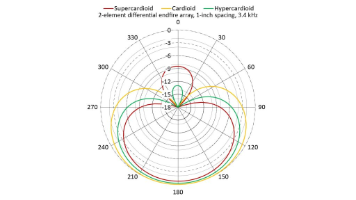
麦克风阵列在人形机器人上的主流安装位置为头顶和胸口。头顶采用环形阵列(6+1或4麦),优势在于360°无遮挡拾音、精准声源定位和低噪音干扰,但垂直角度感知较弱;胸口采用线性阵列(2-4麦),适合前方增强拾音且结构紧凑,但存在后方盲区和噪音干扰问题。特殊分散式布局因算法复杂极少使用。头顶方案适合全向交互场景,胸口方案则适用于定向服务需求。
本届展会以“具身智能·智联万物”为核心,全景呈现这一前沿技术如何颠覆行业逻辑——让消费电子从“被动响应指令”的工具,升级为“主动预判需求”的生活伙伴,通过机器人展区与手机、家电、汽车的跨端联动新品,勾勒全场景智能生态,更向传统消费电子企业发出转型信号:融合机器人技术已是必答题,而非选择题。展会将开设“传统企业转型论坛”,邀请成功跨界企业分享经验,助力行业加速融合。• 跨端协同更无缝:打破设备壁垒,
现阶段以人工清理作为当前光伏灰尘清洁的最主要方式[8],针对大型的光伏阵列或者光伏电站,人工清理所带来的人力劳动成本和水资源消耗却是一种负担,因此利用清洁机器人,有效的、经济的清扫光伏组件的积灰,对于提高光伏产业的经济效益至关重要。Moharram 公司设计了一套全新的清洗系统,如图1.1所示,他的清洁系统是在光伏面板的顶端安装了一排有细孔的 PV 管,在清水中加入阴离子和阳离子表面活性剂的混合物
科技
——科技
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 人工智能6S服务平台
人工智能6S服务平台

 DAMO开发者矩阵
DAMO开发者矩阵


 AtomGit AI 社区
AtomGit AI 社区

 龙虾开发者社区
龙虾开发者社区


 AI编程社区
AI编程社区
 科技大视野开发者社区
科技大视野开发者社区



 AI硬件创业社区
AI硬件创业社区








 EazyDevelop社区
EazyDevelop社区