- @2501_90804007
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
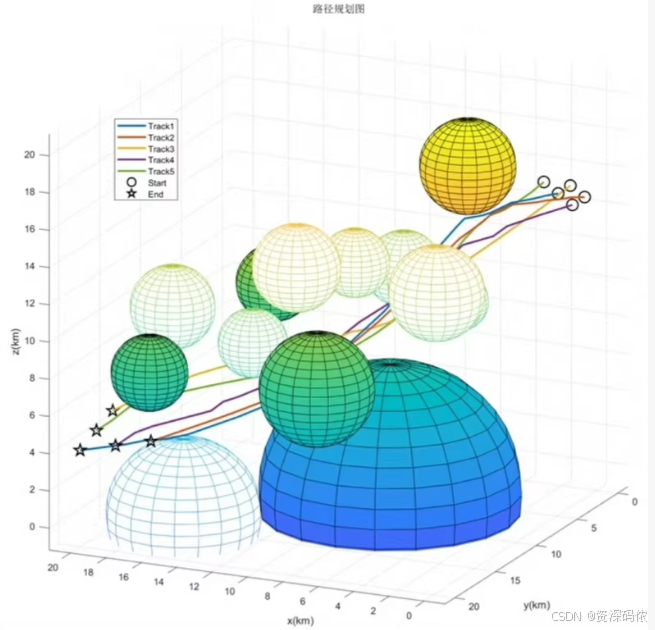
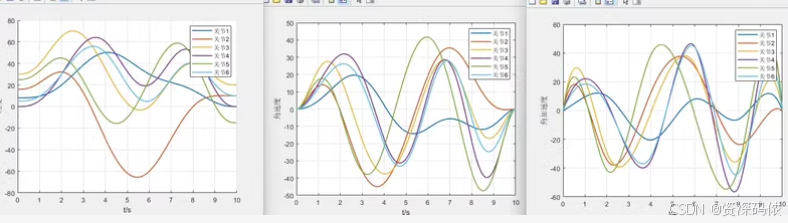
。Matlab/Simulink多智能体编队协同规划与控制算法仿真具体包括:多智能体一致性控制多智能体事件触发控制多智能体任务分配多智能体协同路径规划多智能体强化学习等
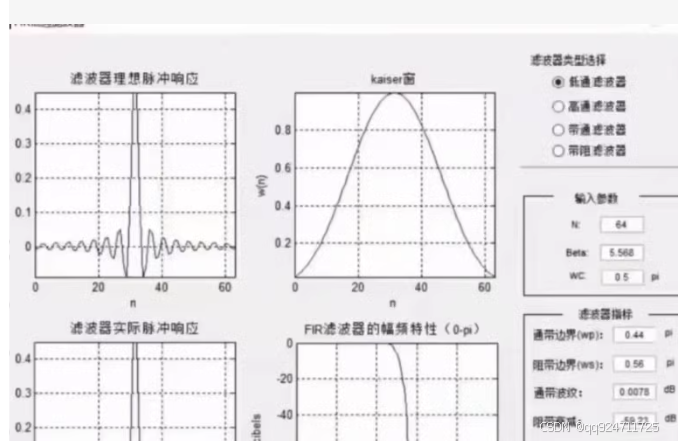
matlab仿真 通信 信号处理simulink雷达阵列信号处理MIMO信号处理通信类仿真常见调制解调amfm ssb dsb bpsk fsk ask ofdm msk等信道编解码hamming码循环码rs码卷积码turbo码ldpcpolar等信道均衡信噪比估计等Matlab/Simulink真建模分析建模文献复现、matlab 编程matlab/simulink电力电子/电气工程/电力系统,
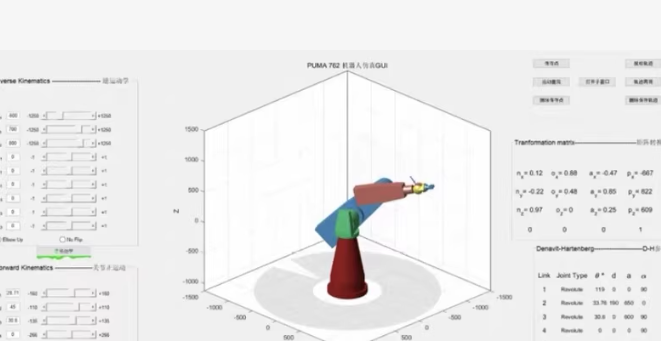
MATLAB机器人机械臂运动学正逆运动学、动力学建模仿真与轨迹规划(笛卡尔空间/关节空间),雅克比矩阵求解,蒙特卡洛采样画出末端执行器工作空间基于时间最优的改进粒子群优化算法机械臂轨迹规划设计/直线/圆弧/抛物线轨迹规划/3次多项式/5次多项式/B样条/3-5-3/4-3-4轨迹规划等
Matlab机器人建模与仿真控制matlab仿真,RRT避障算法,六自由度机械臂避障算法,避障仿真,无机械臂关节碰撞检测,动力学建模,线性化,能控能观性分析,极点配置,状态观测器设计,线性二次最优调节,MATLAB机器人仿真,机械臂控制器设计, 机械臂控制运动仿真,避障搬运路径规划运动仿真三、四、五自由度机械臂运动分析、轨迹规划、正解逆解、工作空间分析、末端方向位移曲线,各种群智能优化算法结合,粒
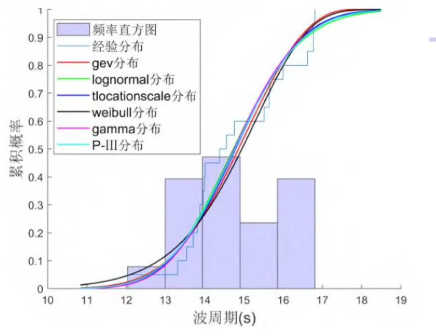
Matlab概率分布拟合,qq图,pp图检验图,置信区间计算,重现期推算,ks检验,边缘分布计算,包括如下:Matlab/Python概率密度函数(pdf)和累计概率密度函数拟合(cdf)支持定制,包括不限于如下:(重现期极值计算)2. 边缘分布拟合2.1 分布拟合函数3. QQ 图和 PP 图绘制3.1 QQ 图和 PP 图绘制函数—5. 重现期推算5.1 重现期推算函数6. KS 检验6.1
。Matlab/Simulink多智能体编队协同规划与控制算法仿真具体包括:多智能体一致性控制多智能体事件触发控制多智能体任务分配多智能体协同路径规划多智能体强化学习等
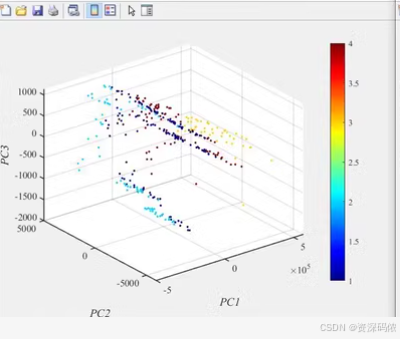
如何使用MATLAB代码编写,七种常见聚类算法等。
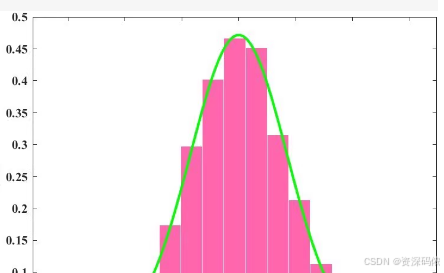
Matlab/Python各种概率分布函数,概率密度分布函数,概率分布函数拟合,绘图。伽马分布,威尔分布,正态分布,柯西分布,均匀分布。Matlab/Python概率密度函数(pdf)和累计概率密度函数拟合(cdf)支持定制,包括不限于如下:(重现期极值计算)
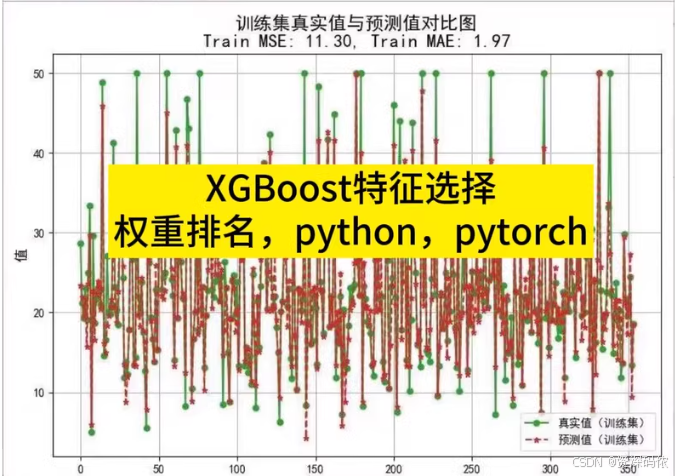
基于pythonXGBoost特征选择,权重排名,python,pytorch有分类和回归情况的代码,有文档说明,图件丰富。替换数据简单。并选取前n个特征进行预测或分类,有精度评价指标。很丰富,绝对超值。基于python。替换数据简单。
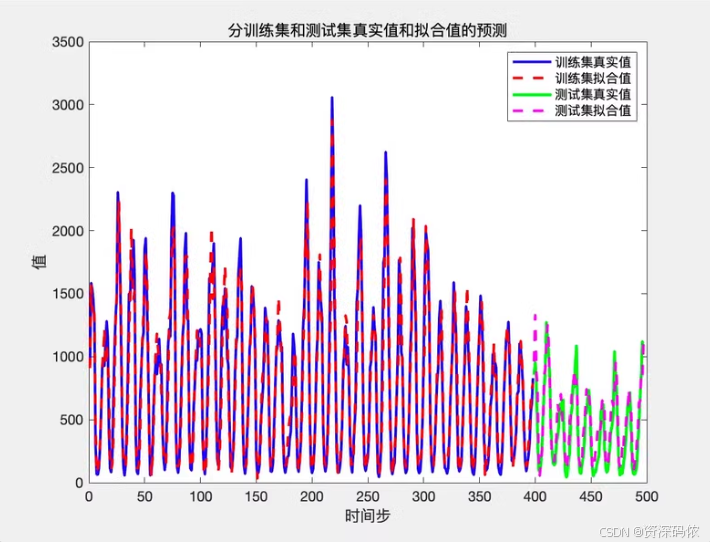
基于Matlab建模代码LSTM时间序列预测,LSTM长短期记忆神经网络使用该程序可以:(1)使用LSTM神经网络对时间序列数据进行建模(2)以测试集RMSE最小为原则自动调参以防止过拟合为原则自动调参以防止过拟合(3)根据目的不同(拟合模型还是预测未来?),可以选择开环预测或闭环预测(4)分训练集和测试集显示拟合图,显示调参过程中的RMSE热力图(5)建模后进行预测并画图。