




- @2201_75454341
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
语音信号分类是语音信号处理领域的核心研究方向,广泛应用于语音识别、声纹认证、语音情感分析、智能人机交互等诸多领域。由于语音信号具有非线性、时变性、随机性的复杂特征,传统分类方法难以精准挖掘语音特征与信号类别之间的关联关系,存在分类精度低、抗干扰能力弱、泛化性差等问题。BP神经网络凭借其强大的非线性映射、自适应学习和容错能力,能够有效适配复杂语音特征数据的分类任务。
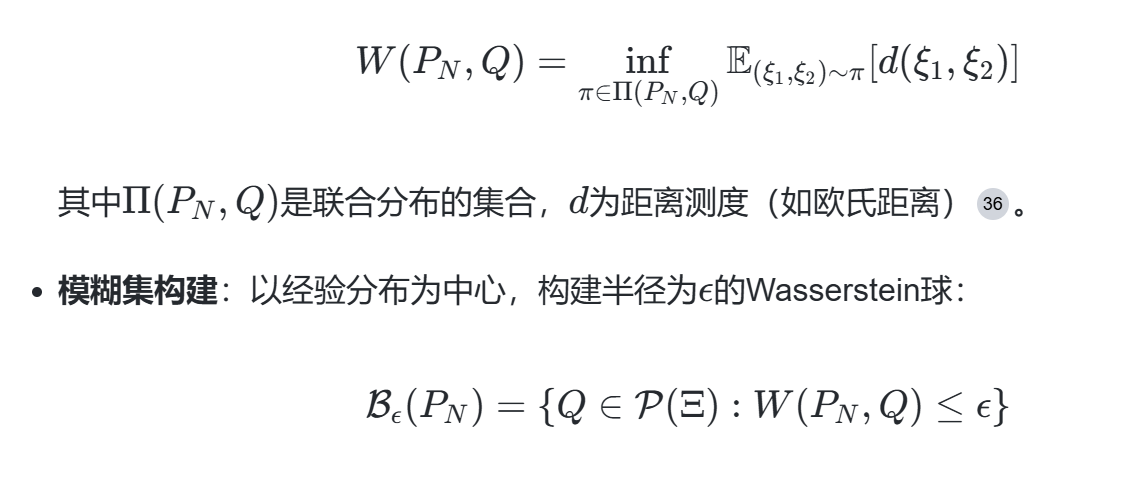
算法创新:开发高效求解器(如混合整数线性规划加速算法)。跨学科融合:结合机器学习与统计学习,构建自适应模糊集。实际系统验证:在复杂工业场景(如高海拔铁路供电系统)中验证模型鲁棒性。基于Wasserstein距离的两阶段分布鲁棒优化模型是一种有效的处理不确定性和复杂性的优化方法。通过对偶转化和线性决策方法的应用,我们可以将复杂的原始问题转化为更易求解的形式,提高决策的鲁棒性和适应性。未来的研究可以进
本研究聚焦于由两个四旋翼飞行器协同驱动的缆绳机器人系统,旨在实现复杂任务(如协作运输、环境探测)中的动态稳定性与精确控制。四旋翼动力学耦合:需协调双飞行器的升力、扭矩与姿态;缆绳悬链线效应:大跨度缆绳的自重下垂与非线性张力分布;刚柔耦合建模:缆绳柔性特性与四旋翼刚体运动的交互;协同控制鲁棒性:通信延迟与外界扰动下的稳定性。
无人水面艇(USV)是一种无需人工直接操控的水面机器人,具备自主/半自主航行能力,通过远程控制或预设程序执行任务。多功能性:适用于海洋勘测、环境监测、搜救、军事防御等场景。持久性:采用锂离子电池或太阳能供电,支持长时任务。安全性:替代有人船执行危险任务(如反海盗、水雷清除)。
全覆盖路径规划是机器人、无人机及自动化设备在环境监测、农业喷洒、建筑3D打印等领域的关键技术。传统螺旋规划虽能实现区域遍历,但存在路径冗余、复杂环境适应性差等问题。本文提出一种融合A*算法的螺旋式全覆盖路径规划方法,通过构建分层栅格地图、设计动态启发函数及优化螺旋扩展策略,实现复杂环境下的高效、无遗漏覆盖。实验表明,该方法在路径长度、覆盖率及死点数量等指标上显著优于传统螺旋算法,为动态环境下的全覆
针对移动机器人在结构化障碍作业场景中存在的遍历盲区、轨迹冗余度高、运动转向频繁、环境适应性弱等全域路径规划难题,本文以栅格地图环境建模为基础,构建一套完整的改进A*算法全域覆盖路径规划理论体系。结合机器人实际作业运动特性,对传统A*启发搜索机制进行优化改进,采用双代价适配策略区分预估代价与真实行走代价,搭配八方向邻域扩展机制提升算法避障能力与路径贴合度。
针对移动机器人在结构化障碍作业场景中存在的遍历盲区、轨迹冗余度高、运动转向频繁、环境适应性弱等全域路径规划难题,本文以栅格地图环境建模为基础,构建一套完整的改进A*算法全域覆盖路径规划理论体系。结合机器人实际作业运动特性,对传统A*启发搜索机制进行优化改进,采用双代价适配策略区分预估代价与真实行走代价,搭配八方向邻域扩展机制提升算法避障能力与路径贴合度。
针对移动机器人在结构化障碍作业场景中存在的遍历盲区、轨迹冗余度高、运动转向频繁、环境适应性弱等全域路径规划难题,本文以栅格地图环境建模为基础,构建一套完整的改进A*算法全域覆盖路径规划理论体系。结合机器人实际作业运动特性,对传统A*启发搜索机制进行优化改进,采用双代价适配策略区分预估代价与真实行走代价,搭配八方向邻域扩展机制提升算法避障能力与路径贴合度。
针对移动机器人在结构化障碍作业场景中存在的遍历盲区、轨迹冗余度高、运动转向频繁、环境适应性弱等全域路径规划难题,本文以栅格地图环境建模为基础,构建一套完整的改进A*算法全域覆盖路径规划理论体系。结合机器人实际作业运动特性,对传统A*启发搜索机制进行优化改进,采用双代价适配策略区分预估代价与真实行走代价,搭配八方向邻域扩展机制提升算法避障能力与路径贴合度。
针对复杂未知环境下传统机器人路径规划算法适应性差、避障稳定性弱、全局搜索效率低的问题,本文开展基于概率图的机器人路径规划方法研究。概率图路径规划依托概率路线图建模思想,通过环境随机采样、节点连通性构建、最优路径检索的核心逻辑,摆脱了传统算法对环境精准建模的依赖,具备强环境适配性与高运算效率。本文系统阐述概率图路径规划的核心理论、运行机制与技术优势,基于Octave仿真平台搭建多场景机器人运动规划仿