




- @2301_79155639
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
使用3D深度学习进行肺肿瘤分割是一种有前景的研究方向。V-Net是一种常用的3D神经网络,特别适用于医学图像分割任务。下面是一个基本的步骤:1. 数据收集和准备:收集具有标注好的3D医学图像数据集,其中包含肺肿瘤的区域标签。这些图像可以是通过CT扫描等方式获取的。确保数据集中包含多样性的肺肿瘤形状、尺寸和位置,以及其对应的区域标签。2. 数据预处理:对收集到的3D医学图像进行预处理,如灰度归一化、
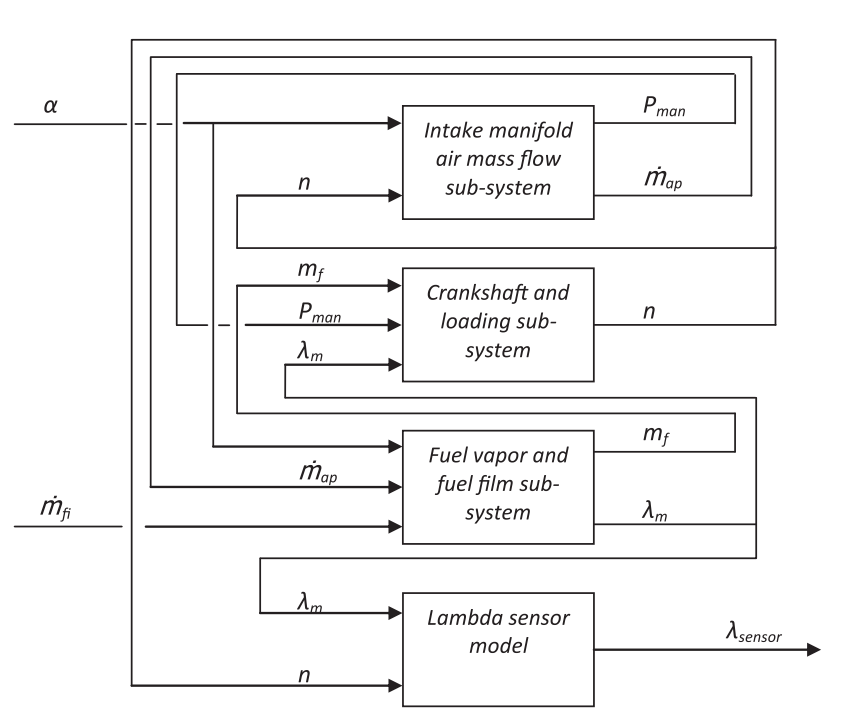
火花点火内燃机(SI ICE)是城市地区空气污染的主要原因之一。研究表明,如果能够将空燃比(lambda)控制在理论值1的±1%范围内,催化转化器几乎可以消除所有排放污染物。汽车行业主要依赖比例-积分(PI)控制器来调节lambda值。然而,PI控制器本质上是线性的,在非线性条件下无法提供鲁棒的性能。在本项目中,我们设计并实现了模型预测控制(MPC),以将lambda值调节在理论值的±1%范围内。
提出了变分模态分解(VMD)和麻雀搜索算法(SSA)与长短期记忆神经网络(LSTM)相耦合,建立了光伏预测模型(VMD-SSA-LSTM)。首先利用VMD对历史负荷数据进行分解,然后依据SSA对LSTM的参数进行寻优,并将分解出的负荷分量输入到LSTM神经网络,最后将每个分量的预测值相加,得到光伏负荷预测值,结果表明,与LSTM、VMD-LSTM模型相比,VMD-SSA-LSTM模型的预测精度更高
异构混合阶多智能体系统编队控制的分布式优化研究一、引言在当今智能化和自动化技术快速发展的背景下,多智能体系统的研究日益受到关注。异构混合阶多智能体系统作为其中的一个重要研究方向,其编队控制的分布式优化具有重要意义。通过合理地设计编队控制策略并采用分布式优化方法,可以实现智能体系统的高效协作和优化控制,提高系统的整体性能和效益,在众多领域有着广泛的应用前景。二、异构混合阶多智能体系统概述。

本文研究了具有非线性不确定性的多智能体系统的固定时间事件触发共识控制问题。基于事件触发策略的固定时间共识协议被提出,这些协议可以显著降低能量消耗和控制器更新的频率。集中式和分布式共识控制策略均被考虑。证明了在所提出的事件触发共识控制策略下,可以避免Zeno行为。与有限时间共识相比,固定时间共识可以在固定的收敛时间内达成,而与智能体的任意初始状态无关。最后,通过两个例子展示了固定时间事件触发共识协议
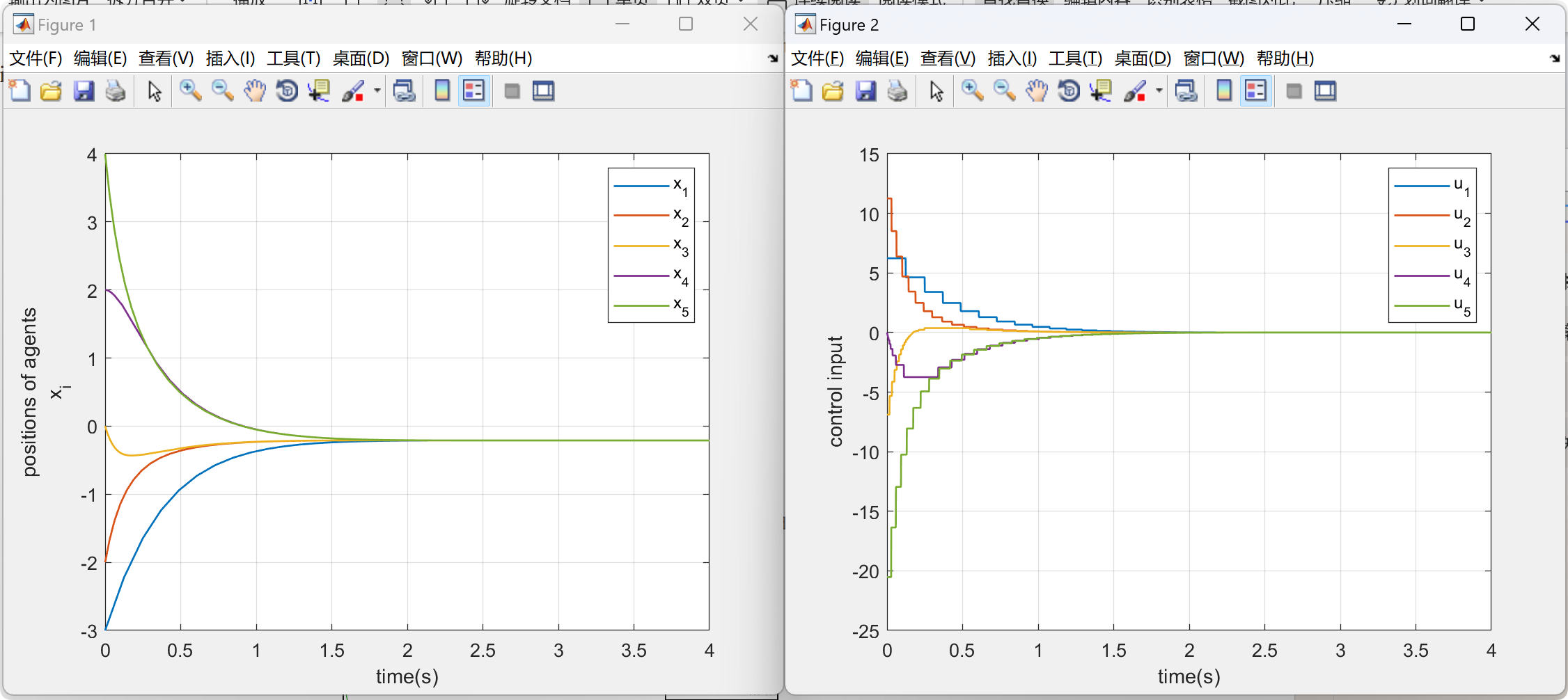
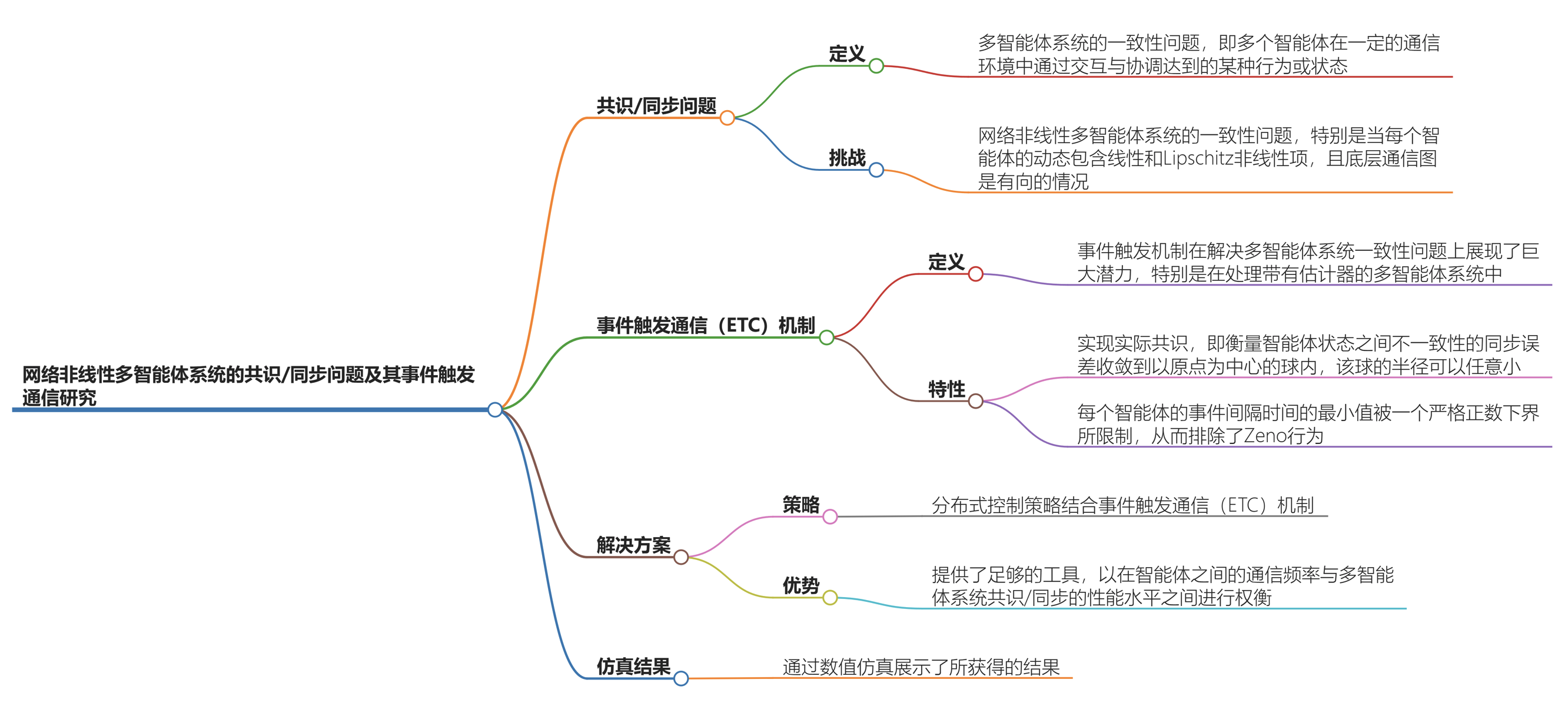
本文提出了一种解决方案,用于解决网络非线性多智能体系统(MAS)的共识/同步问题,采用分布式控制策略结合事件触发通信(ETC)机制。与以往文献中报道的工作不同,我们考虑了每个智能体的动态包含线性和Lipschitz非线性项,且底层通信图是有向的情况。所提出的策略具有两个重要特性:i)实现实际共识,即衡量智能体状态之间不一致性的同步误差收敛到以原点为中心的球内,该球的半径可以任意小;ii)每个智能体
各种复杂的工业生产过程、航空航天系统、大型电网等系统,其共同特征是规模庞大、结构复杂,并具有很强的非线性和不确定性,难以建立精确的数学模型和用常规的控制理论去进行定量计算和分析,这类系统中存在的多智能体往往具有异构性,即各个智能体的结构、动力学模型等可能不一致。一致性问题是多智能体系统研究中的一类基本问题。在实际工程应用中,根据性能要求和任务种类等因素为个体设计控制规则,通过个体间的互相协调,保证

1]陈怀毅,胡英坤,杨毅,范舟.二阶锥松弛在配电网最优潮流计算中的应用[J].电气应用,2020,39(01):49-54.摘要:最优潮流计算是电网规划、优化运行的重要基础。首先建立了配电网全天有功损耗最小化的最优潮流计算模型;其次结合辐射型配电网潮流特点建立支路潮流约束,并考虑配电网中的可控单元,包括分布式电源和离散、连续无功补偿装置,建立其出力约束,该模型为非凸非线性模型;
VMD-CNN-LSTM模型是一种结合了变分模态分解(VMD)、卷积神经网络(CNN)和长短时记忆网络(LSTM)的混合预测模型。数据预处理:收集历史电力负荷数据,并进行必要的清洗和规范化处理,以消除异常值和噪声。VMD分解:利用VMD技术对预处理后的负荷数据进行分解,将其分解为多个固有模式函数(IMF)。每个IMF分量代表原始信号中不同频率的成分,有助于分离噪声和信号,并揭示隐藏在复杂负荷数据中
本文提出了一种基于蚁群的连续多UGV路径规划,该规划器由UGV路径规划和多UGV协调组成。该文提出一种基于概率的随机游走策略和自适应航点修复机制的连续蚁群优化,以优化每个UGV的路径。然后通过速度偏移优化算法解决多智能体协调问题UGV之间的碰撞避免问题。路径规划最为基本的要求是规划一条从起始点到目标点的无碰撞路线并在执行过程中动态避障,在此基础上规划的路径尽量考虑动力学约束与动能的消耗和效率问题。