登录社区云,与社区用户共同成长
邀请您加入社区
道本科技合规数知法用法平台,利用大数据与人工智能技术,采用“AI事项查法”技术,允许企业在不清楚具体法规的情况下,直接输入相关事项,快速获取数字化结果。正是在这样的背景下,天津市道本科技有限公司——一家成立于2008年、深耕企业法务合规数字化建设领域的国家高新技术企业——打造出覆盖“合规管理—合同风控—法务数智化”的一体化解决方案。从金融业的监管数据报送,到制造业的合同履约管控,从反洗钱到数据安全
更重要的是,履约数据会反馈回前面的环节:哪些条款在履约中经常出问题、哪些供应商承诺的和交付的不一致、哪些业务单元的合同执行偏差最大——这些信息会反向优化合同范本和审查重点。每一次审查中的审核意见——业务提了什么诉求、法务标注了什么风险、财务关注了什么成本——不再停留在邮件和批注里,而是被系统自动采集,沉淀为审查知识库的一部分。当合同被拆解成可计算的要素后,比对、审查、统计就有了统一的基础。道本科技
在当今复杂的Web应用中,精细化的权限管理是保障系统安全的关键环节。PHP-Casbin 作为Casbin生态的PHP实现,凭借其灵活的模型支持和强大的扩展能力,已成为PHP开发者实现访问控制的首选工具。
掌握六种内存顺序(memory_order_relaxed、memory_order_consume、memory_order_acquire、memory_order_release、memory_order_acq_rel和memory_order_seq_cst)的语义差异至关重要,它们在不同的性能要求和一致性保证间提供了灵活的平衡点。理解这些高层抽象与底层内存模型之间的关系,能够帮助开发者
摘要:Haiku4.5工具增强ClaudeCode编码效率,支持Explore子代理快速获取代码库上下文,加速应用开发。aicoding.sh平台已率先开放该AI编程功能试用。
Java 8引入的Stream API为集合操作带来了革命性的改变。Stream允许开发者以声明式方式处理数据集合,通过流水线式的操作让代码更加简洁易读。与传统的集合操作相比,Stream API提供了更高效的数据处理方式,特别是在处理大数据量时表现尤为出色。处理自定义对象时,需要确保对象正确重写了equals()和hashCode()方法。如果这两个方法实现得当,distinct()方法就能准确
Claude和Codex展现了AI在编程中的差异化能力:Claude擅长理解复杂代码、还原业务逻辑并识别架构风险,如同懂业务的高级工程师;Codex则精于将明确需求快速转化为代码,实现多文件修改和批量重构,像执行力强的程序员。二者互补使用效果最佳——先用Claude判断"该不该写",再用Codex执行"怎么写",这种组合比单独使用任一个工具都更高效。
C++关键字陷阱与规避指南:文章揭示了auto类型推导意外、const可变性矛盾、static线程安全问题、virtual多态误用等12个典型陷阱,并给出明确对策:优先auto&引用、默认explicit构造函数、强制override标记等。核心指出C++灵活性带来的风险,强调规避陷阱比掌握技巧更重要,需严格遵循"虚函数必有虚析构"等编码原则。
业务人员用自然语言描述需求——“我需要一份设备采购合同,分批交货,付款分三期”——系统从库里调取匹配条款,自动组装模版。更上层的是,系统结合DeepSeek定期输出风险总结报告,从风险领域、特征、变化趋势三个维度量化呈现,管理者拿到的不只是一份预警清单,而是可解读的风险画像。企业在合同管理上花的力气不少,但经常卡在三个环节:起草靠翻箱倒柜、审查靠个人经验、履约靠人工台账。法务审查合同,80%的时间
本文系统总结了SQLite3在ARM嵌入式Linux系统中的生产级使用方法。重点包括:1)正确打开/关闭数据库的方法与注意事项;2)安全高效的CRUD操作实现;3)多线程/多进程并发访问的三种模式及推荐方案;4)WAL模式的优势与使用技巧;5)异常处理与健壮性保障措施;6)ARM嵌入式专项优化建议。文章特别强调在嵌入式环境中,数据库稳定性比功能更重要,需要充分考虑并发控制、异常恢复和存储介质特性等
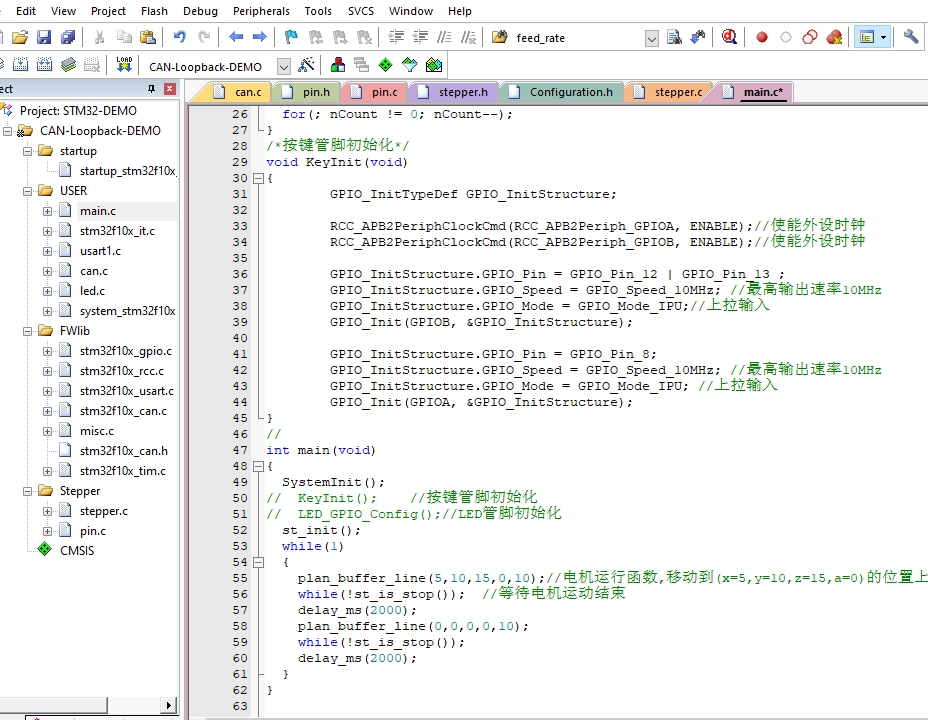
stm32f103c8步进电机的脉冲控制,有详细的算法说明,梯形加减速实时计算,算法来之avr446手册,自己写的,mdk直接编译,还写了word说明文档,算法清晰,项目中验证过,支持启动方向设置,支持min max限位开关,支持限位开关极性设置,支持jog点动模式,还有速度更快的升级算法。完整工程在Github(假装有链接),MDK工程直接编译,Word文档里连示波器抓的波形图都贴好了。这个方案
@TYoursLC有源低代码(双输出的低代码产品–既能输出功能,又能100%输出源码,数十倍的提高你的开发效率) 开源了OC开源地址:https://gitee.com/think9/your-lc-active-low-code.git设计原则:简单实用、高效快捷,开箱即用、使用简单,可数十倍的提高你的开发效率产品目标:用户可自定义录入表、管理流程、统计报表(待完成);双输出,既能输出功能,又能
本文介绍了Codex代码助手的使用方法和常用参数,包括模型选择(-m)、确认提示(-a)、图片输入(-i)、工作目录(-C)等。通过大量示例展示了Codex在代码重构、测试生成、文档翻译、错误诊断等方面的应用场景,如将类组件转为React Hooks、批量重命名文件、解释正则表达式等。还介绍了全自动模式(--full-auto)、会话恢复(resume)、非交互执行(exec)等特殊功能,以及如何
2014 年 Element 1.x 发布,让 Vue 生态有了第一个工业级 UI 库。2020 年 Element Plus 上线,让 Vue 3 中后台开发有了标准答案。2024 年 MCP 协议诞生,让 AI 真正能"读懂"代码库。下一个十年,组件库的竞争不是 prop 多不多、样式好不好看能不能让 AI 写出能跑的代码能不能让一份 schema 跨框架复用能不能把团队的横向需求收口到配置层
外部碎片:由于动态分配和释放的随机性,大块空闲区被不断切割成无法合并的小空闲块,导致无法满足大连续请求。内部碎片:由于分配粒度固定(页、分区、对象缓存),申请大小不是粒度的整数倍时,块内剩余空间被浪费。理解内存碎片的成因,有助于设计高效的内存管理策略,平衡内存利用率与分配速度。在现代通用操作系统中,分页机制配合按需分配基本消除了外部碎片,而内部碎片(页内浪费)则作为换取灵活性和简单性的代价被接受。
实际高性能通信系统很少单一使用某一种方式,而是将它们结合起来以平衡吞吐量和 CPU 负载:1、中断 + DMA:网卡、磁盘控制器中,DMA 负责批量数据搬运,传输完成后产生一次中断通知 CPU 取走整块数据,避免逐字节中断。2、中断 + 轮询 (NAPI):先用中断通知有数据到来,随后关闭中断,改用轮询方式持续收割数据包,当一段时间无包时再重新开启中断。这样在高负载下避免了频繁中断,低负载下保留了
在嵌入式系统开发中,资源受限的场景尤为常见——有限的存储空间、紧张的内存容量、严格的功耗约束,这些约束条件使得内核与操作系统的匹配变得至关重要。一个恰到好处的组合不仅能充分发挥硬件性能,还能在有限的资源内实现复杂的功能;而一个不匹配的选择则可能导致系统臃肿、响应迟缓甚至无法正常运行。
DeepSeek+知识图谱双引擎,智能审直零盲区”“十万+条款构建「合同基因库」,一健生成合规文本"“99.6%防篡改核验,构筑合同安全屏障”“400+风险模型预判,全周期履的可视”“30秒跨文本雷达扫描,风险无处遁形”
摘要: 芯片理论性能飞速提升,但实际效率增长缓慢。实测显示,2025年旗舰芯片(理论算力1000 TFLOPS)在通用软件环境下仅发挥0.5%的硬件利用率,95%算力被操作系统调度、框架封装和数据拷贝等冗余流程消耗。相比之下,10年前的老芯片搭配极简代码可实现100%利用率。行业现状表明,软件臃肿(千万行操作系统代码、多层架构冗余)是算力浪费的主因,单纯堆硬件无法突破效率瓶颈,唯有精简软件才能释放
在当今技术快速发展的时代,编程语言作为人与计算机沟通的核心工具,正面临着新的挑战和机遇。随着硬件架构的多样化、计算场景的复杂化,以及人工智能技术的普及,传统的编程语言设计范式已难以完全满足现代开发需求。基于这一背景,我们尝试借助AI的力量,提出一种全新的编程语言开发方案——PanLang,旨在探索一种更高效、更灵活、更贴近未来计算需求的编程范式。本系列文章共包含14个章节,将从语言设计理念、核心技
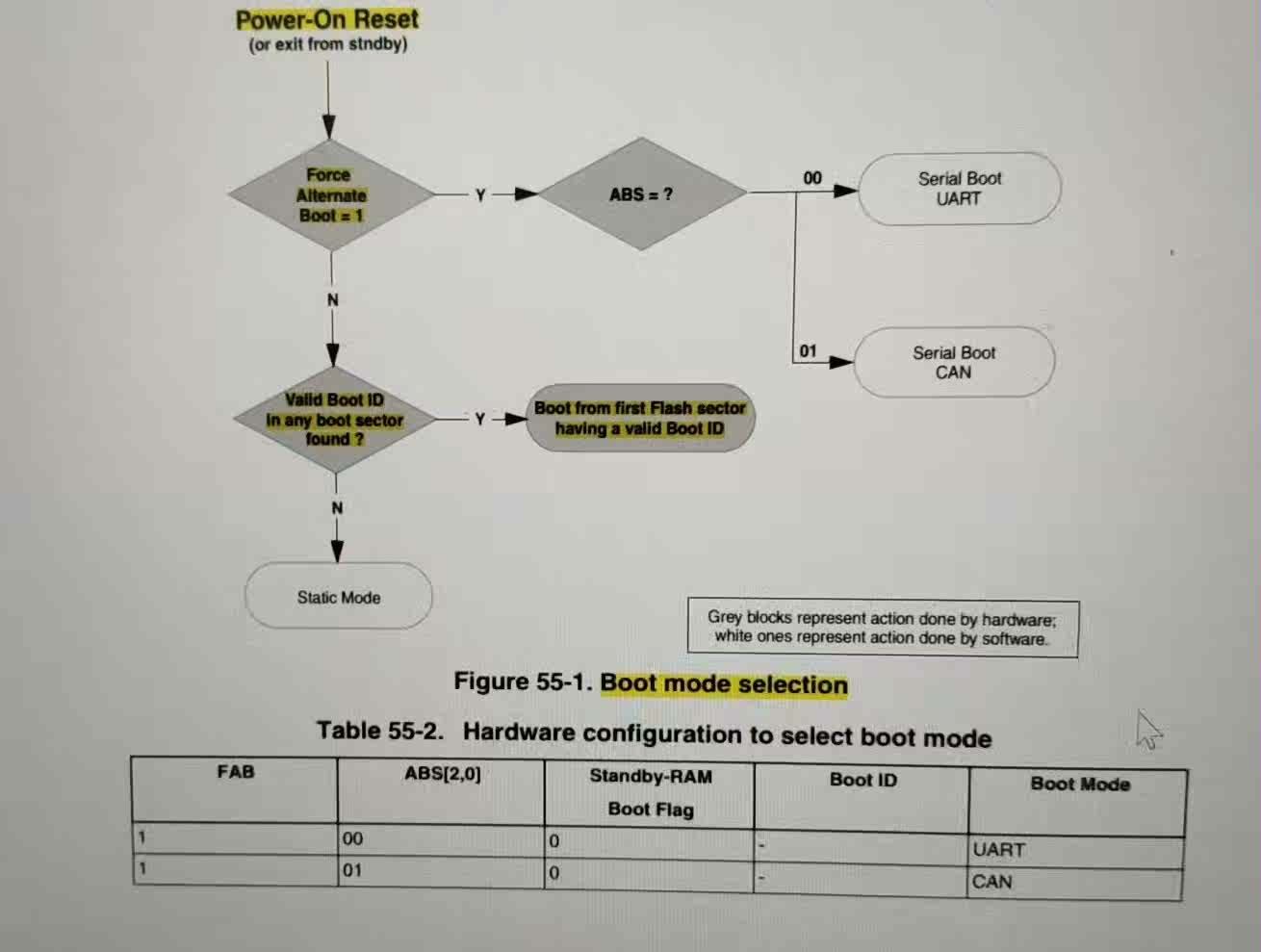
汽车ECU BootLoader开发基于CAN总线通信MPC57XX系列MCU bootloader开发文档54页在汽车电子领域,ECU(Electronic Control Unit)的重要性不言而喻,而BootLoader则是ECU中关键的一环。今天咱们就来聊聊基于CAN总线通信,利用MPC57XX系列MCU进行BootLoader开发的那些事儿。
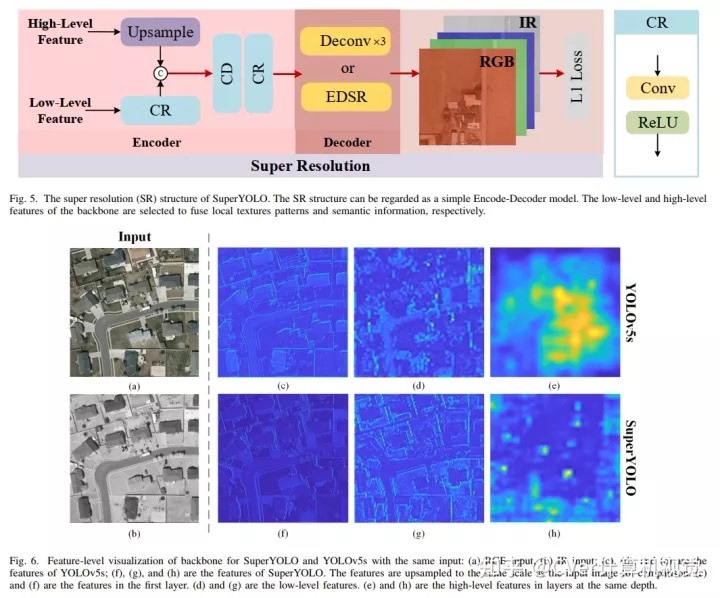
最后放个精度对比彩蛋:在DOTA遥感数据集上,同样的YOLOv8框架,加入SuperYOLO改进后,mAP从63.1直接飙到71.4。这里有个细节处理很妙——不同模态的特征先各自过SPPF金字塔池化,再做通道注意力融合,比粗暴concat后再处理省了三分之一的显存。支持yolov5,YOLOv7,YOLOv8优化改进,加入注意力机制多尺度,transform等提升精度。支持yolov5,YOLOv
SDN 计算机人必看!拒绝 “计算机毕业 = 码农” 的固有认知,网络安全正在成为计算机从业者的职业新赛道,重塑你的职业上限。无需复杂积累,本文从职业痛点出发,讲解网络安全的职业价值、入门方向,干货无冗余,收藏这篇,不用瞎摸索,轻松解锁计算机专业的更多可能。第三组(职场适配,应届生 + 职场码农通用)
该方案已在 5000+ 台现场设备稳定运行超过两年,最长连续升级 8000 次无异常,可直接复制到 Zynq-7000、Kintex-7、Artix-100T 等平台,为后续 OTA、边缘计算、远程运维奠定坚实基础。4) 该文件即为“带升级逻辑的 FPGA 映像”,首次需通过 JTAG 烧入,之后即可远程升级。▲100 M 固定速率。升级qspi flash,无需增加外部电路,无需内存,方便实用,
一什么是敏捷二敏捷及变更成本三什么是敏捷过程四极限编程极限编程过程工业极限编程五其他敏捷过程模型Scrum动态系统开发方法敏捷建模敏捷统一过程敏捷过程工具集 敏捷软件工程是哲学理念和一系列开发指南的综合。这种哲学理念推崇:让客户满意且尽早的增量发布;小而高度自主的项目团队;非正式的方法;最小化软件工程工作产品以及整体精简开发。开发的指导方针强调超越分...
的一抓一大把。应该是吸引力法则: 我自认为是有个性的人了。我收的人个性大都居于我之上!我其实早就实现了年入百万。真的不难 我是做软件开发/网络安全/编程/HACK等项目我的客单价就是25-50W 一单。我从2017开始就年入百万 至今2025年5月 没下跌过七位数。还是那句话 能搞钱的有搞钱能力的 一直都有 。 一直都在循环和复盘 更新迭代。穷的呢 一直都在工厂打螺丝呢。 也不
敏感信息应加密存储:Pythonfrom cryptography.fernet import Fernetkey = Fernet.generate_key()cipher = Fernet(key)encrypted_cookie = cipher.encrypt(str(cookie).encode())quark_auto_save 开源项目提供完整的Cookie管理实现2browser-
持续集成是一种软件开发实践,开发者经常将他们的代码更改合并到一个共享的代码库中,每次合并后都会自动触发构建和测试。这种方法有助于及早发现和修复问题,确保代码库始终处于可部署状态。
2.直接把raw.githubusercontent.com换成raw.gitmirror。注:本文仅属个人观点,本人没做太多测试,termux是行的,但有些可能不支持:)1.终端需要安装文件获取工具 如:wget等(此方法只可用wget)即可(后面的不用变)
在敏捷上下文里,"(软件)设计"是一个让很多人感觉有点困惑的话题。不同于"文档"在敏捷里的地位,因为至少敏捷宣言里有一句话提到了敏捷对"文档"的态度是怎样的,但对于"设计",却让人有点摸不着头脑。
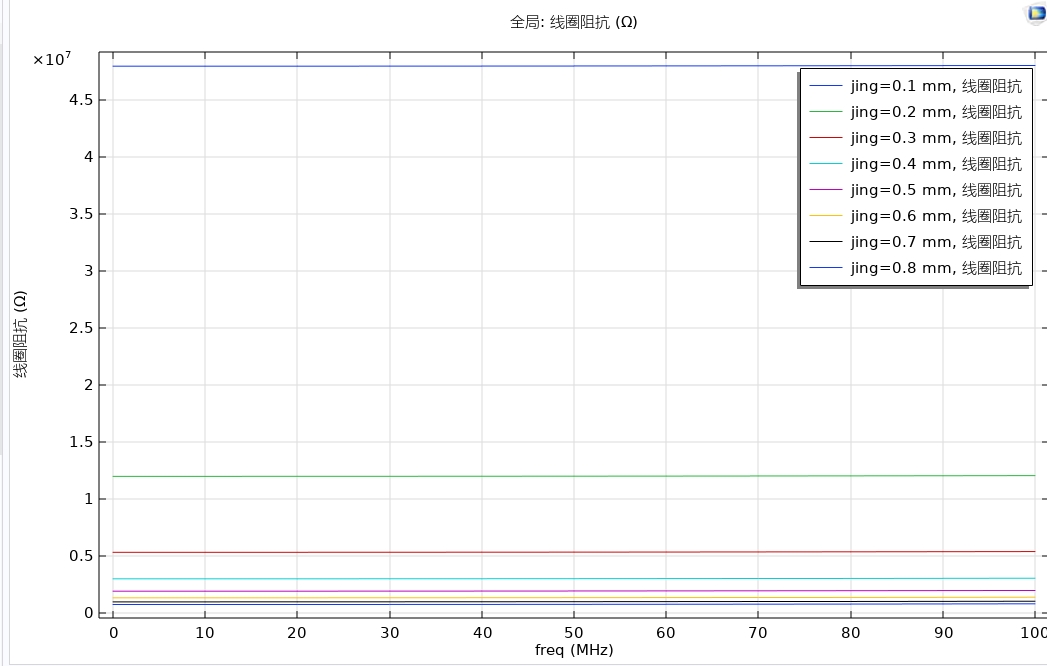
无损检测:涡流Comsol仿真。图一:二维涡流检测模型图二:电导率140,频率80MHz下,磁通密度模图三:0到100MHz下,频率和阻抗关系图四:不同电导率和阻抗关系图五:不同提离和阻抗关系图六:不同线径和阻抗关系一共是4个二维模型。在无损检测领域,涡流检测是一种相当重要的技术,而借助Comsol进行仿真能够帮助我们更深入地理解涡流检测的原理与特性。今天就来和大家分享一下涡流Comsol仿真相关
2,修改编译使用的核心数。Keil5左上角状态栏edit-->configuration-->other-->number of parallel job。将数量给成和电脑一样的核心数(不是多线程,就是电脑CPU有多少个核,就改成多少)。3,如果是使用STM32 HAL库的朋友,可以尝试编译时去掉调试信息。最紧win11上发现点击Keil5点击编译时非常慢,要十几分钟。如果有同样问题的朋友也可以试
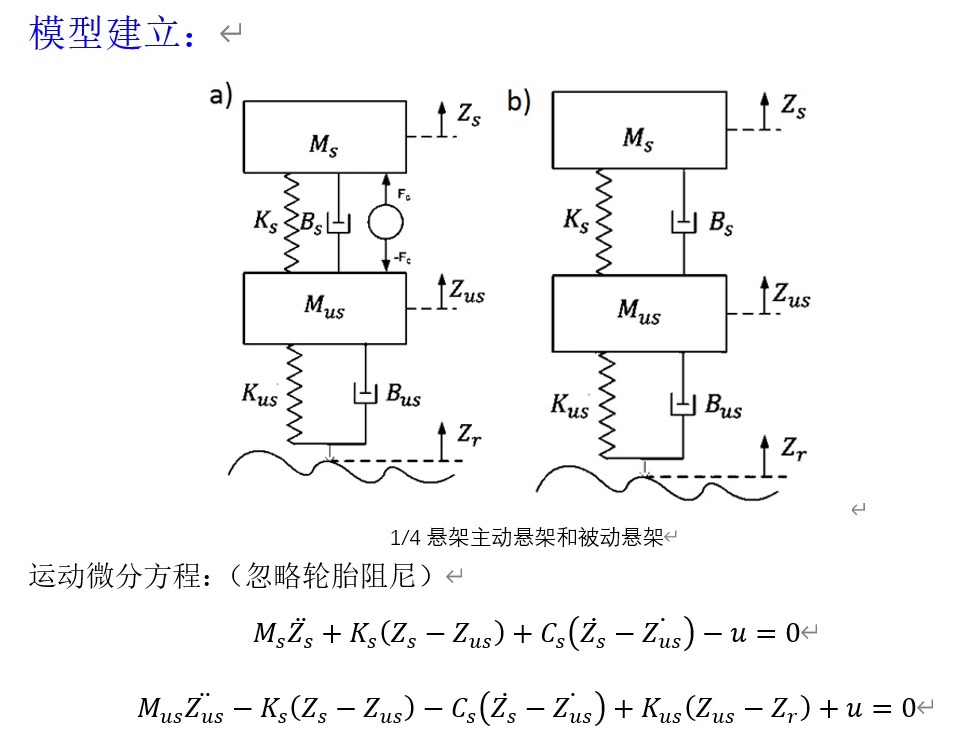
通过上述讨论可以看出,MPC 控制器在主动悬架系统中的应用具有显著的优势。无论是 2自由度还是 4自由度的模型,MPC 都能够通过滚动优化的方式,实现对车身加速度、动挠度和俯仰角速度的精确控制。随着计算能力的提升,MPC 算法在汽车悬架系统中的应用前景更加广阔。基于深度学习的方法,进一步提高路面预知和控制精度。多约束优化方法,以平衡控制性能和能耗。实时 MPC 算法,降低计算复杂度以适应更高采样的
matlab:双或三方演化博弈,lotka-Volterra 1.双方演化博弈:代分析稳定点分析,代绘制相位图,matlab仿真图代码。matlab:双或三方演化博弈,lotka-Volterra 1.双方演化博弈:代分析稳定点分析,代绘制相位图,matlab仿真图代码。2.三方演化博弈:代分析稳定点分析,代绘制相位图,matlab仿真图代码3.lotka-Volterra模型。2.三方演化博弈:
使用AI编程一周的实践告诉我:愤怒可以消失,心流可以回来;能力不会退化,反而会提升;工作可以变得有趣,而不只是消耗。
极限编程
——极限编程
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区

 DeepSeek技术社区
DeepSeek技术社区

 AI Agent技术社区
AI Agent技术社区



 DAMO开发者矩阵
DAMO开发者矩阵


 AI编程社区
AI编程社区

 MCP技术社区
MCP技术社区

 openEuler 社区
openEuler 社区
 AI硬件创业社区
AI硬件创业社区
 AtomGit开源社区
AtomGit开源社区
 脑启社区
脑启社区


 腾讯云开发者社区
腾讯云开发者社区