登录社区云,与社区用户共同成长
邀请您加入社区
摘要: UNR155是联合国WP.29推出的全球车载网络安全强制法规,要求车企构建CSMS管理体系,对Linux车载系统(如智能座舱、域控制器)实施全生命周期安全防护。法规聚焦权限管控、入侵检测、漏洞修复等核心要求,而通用Linux存在权限松散、监测缺失等短板。望获OS通过内核加固(最小权限、可信启动)、入侵行为审计、漏洞闭环管理等能力,满足UNR155对车载操作系统的技术要求,助力车企合规。该法
在软件工程实践中,代码重构与接口测试是保障系统可维护性与可靠性的核心环节。理解遗留系统结构、识别高危耦合点、实现跨模块数据流追踪,是重构成功的关键前提。随着大模型技术深入开发工作流,具备工程上下文感知能力的AI工具正成为开发者理解复杂系统、自动化生成符合架构规范代码的重要协作者。本文聚焦车载嵌入式场景,以真实2500行‘祖传’Java类为对象,详解如何借助Claude Code完成类职责解耦、Cl
以太网 PHY 就是物理层收发器,负责把数字信号转换成网线上面的模拟信号传出去,再把收到的模拟信号转换成数字信号给 SoC。为什么不集成到 SoC 里面?其实现在有些 SoC 也集成,但车规设计一般还是外挂。原因:车规要求电磁兼容,外挂更好设计不同车型需要不同数量的网口,外挂更灵活坏了也好修,更换方便所以大多数设计都是 SoC + 外置 PHY。预算够要安全:选 QNX,一分钱一分货要生态要开发快
本文介绍了在NVIDIA 5090D服务器上部署和运行Alpamayo自动驾驶大模型的全过程。Alpamayo是由NVIDIA社区开发的开源VLA(视觉-语言-动作)模型,具有10B参数规模,支持可解释的驾驶决策和多模态轨迹规划。实验环境搭建包括:创建Python 3.12虚拟环境、安装git/uv工具、配置Hugging Face访问权限,并从ModelScope下载模型权重。通过修改推理脚本路
支持零代码自定义薪酬公式,可自由配置基本工资、岗位工资、绩效奖金、销售提成、计件工资、夜班补贴、全勤奖、工龄工资、各类专项津贴。能力,真实薪资账用于企业内部核算发薪,合规审厂账适配BSCI、SA8000、Sedex、沃尔玛、迪士尼等全球供应链审核标准,自动生成合规工时薪资台账,数据隔离、权限安全,帮助全国外贸制造企业稳定接单、规避审厂风险。:月底需要汇总考勤、加班、请假、绩效、提成、各类补贴数据,
AUTOSARAUTomotiveOpenSystemA由宝马、奔驰、大众、福特、丰田、博世、大陆等核心成员在 2003 年发起的全球汽车软件标准化联盟。它不是一款软件,而是一套标准和方法论。直接操作硬件寄存器,是唯一与 MCU 耦合的部分换 MCU 只需要换 MCAL 驱动窗口控制端口:├─ RPort: ButtonStatus ← 按键信号 (CAN 输入)├─ RPort: MotorCu
TCU软件架构全景解析 TCU软件采用分层设计,核心分为五层: 硬件抽象层(BSP/HAL)屏蔽硬件差异; 操作系统层(FreeRTOS/Linux/QNX)管理资源调度; AUTOSAR框架(CP/AP)提供标准化服务(通信/诊断/存储); 中间件(SOME/IP/DDS/MQTT)实现服务化通信; 应用层(SWC)完成远程控制、OTA等业务功能。 关键特性: 混合架构:CP处理实时安全任务(C
而算法,则是程序的灵魂,是解决实际问题的方法论。本指南旨在为C++开发者提供一个从基础到精通的系统化学习路径,通过理论与实践相结合的方式,助你攀登C++算法的高峰。实战建议:大量练习使用这些容器解决LeetCode上的简单和中等难度题目,如“两数之和”(使用`unordered_map`)、“合并两个有序数组”(使用`vector`的双指针)。最后,记住算法学习是一个螺旋式上升的过程,需要反复的理
在游戏开发中,频繁的对象创建和销毁会导致内存碎片与分配开销,因此需通过对象池设计实现预分配、快速复用。例如,使用模板化的对象池模板类,通过一次大规模的。案例:在物理引擎的刚体碰撞检测中,用火焰图分析发现80%时间消耗在叉积计算,通过替换。的命令列表批处理中,预分配大型命令缓冲区并通过指针偏移构建,完全避免反复内存分配。绕过标准glibc的陷阱门层,直接使用系统调用编号进入内核,减少函数调用帧的开销
MIT 许可证是一种宽松的开源许可证,允许自由使用、修改和分发软件,包括商业用途。若提供基于 DeepSeek-V3.2-Exp DSA 的云服务或 SaaS,需明确服务条款,区分原生开源代码与自研扩展部分的权利归属。在商用部署中,必须确保所有副本(源代码或二进制形式)包含原始版权声明和完整的 MIT 许可证文本。若修改代码,需在修改后的文件中注明变更记录,但无需公开修改后的源代码。即使采用 MI
战斗单元基类`CombatUnit`的多态实现,支持步兵类`Infantry`(含EP分系统)、飞行器类`Aircraft`(三维碰撞处理)、载具类`Vehicle`(动力学模型)- 状态机模式在战术行为控制系统中的应用,通过继承`State`基类实现攻击/撤退/维修等状态的无缝切换。- 三维包围盒树优化(OOP实现`BoundingSphere`/`AxisAlignedBox`容器)3.1 场
本文介绍了如何在星图GPU平台上自动化部署sensevoice-small-语音识别-onnx模型(带量化后),实现车载系统的离线语音识别功能。该方案能有效解决无网络环境下的语音交互问题,用户可通过本地语音指令直接控制车机,如调节空调或设置导航,提升驾驶安全与便捷性。
本文介绍了如何在星图GPU平台上自动化部署轻量级语音合成引擎🎙️ CosyVoice-300M Lite,并探讨了其在车载系统中的应用。该方案专为低算力环境设计,能够在纯CPU环境下实现自然流畅的语音合成,典型应用场景包括为车载导航、信息播报等提供离线、低延迟的语音反馈,显著提升交互体验。
本文介绍了如何在星图GPU平台上自动化部署fish-speech-1.5(内置模型版)v1镜像,实现高品质离线文本转语音(TTS)功能。该方案特别适用于车载系统,可为智能座舱提供完全离线、自然流畅的语音导航与播报服务,提升驾驶体验。
本文介绍了如何在星图GPU平台上自动化部署fish-speech-1.5镜像,为车载Linux系统构建离线TTS(文本转语音)服务。该方案使智能座舱能够实现稳定、低延迟的离线语音合成,典型应用于车载导航播报、语音助手对话等场景,提升驾驶体验。
本文介绍了如何在星图GPU平台上自动化部署Qwen3-ASR-0.6B镜像,实现高效的车载语音识别功能。该镜像支持离线模式,特别适用于智能汽车环境,能够准确识别多语言指令,如导航设置、媒体控制等,提升驾驶安全性和便利性。
本文介绍了如何在星图GPU平台上自动化部署Qwen3-TTS-12Hz-1.7B-VoiceDesign镜像,以构建智能车载语音交互系统。该方案利用该模型的语音设计能力,可根据自然语言指令生成清晰、自然的语音,典型应用于车载导航、音乐播放等场景,有效提升驾驶过程中的语音交互体验。
本文介绍了如何在星图GPU平台上自动化部署QWEN-AUDIO | 智能语音合成系统Web镜像,快速构建车载智能语音助手。该方案利用Qwen-Audio强大的音频理解与抗噪能力,可实现在复杂行车环境中,通过自然语音指令控制导航、音乐及空调等车载功能,提升驾驶安全与交互体验。
本文介绍了如何利用星图GPU平台自动化部署Fish-Speech-1.5镜像,以构建智能车载语音交互方案。该方案能将导航、娱乐控制等文本信息,转化为自然、富有情感且支持个性化音色的语音播报,从而提升驾驶安全性与交互体验。
本文介绍了如何在星图GPU平台上自动化部署Qwen3-ASR-0.6B镜像,实现智能座舱语音交互功能。该轻量级语音识别模型支持52种语言和方言,在车载噪声环境下表现优异,可应用于实时语音指令识别、导航控制和多媒体操作等场景,显著提升驾驶体验。
本文介绍了如何在星图GPU平台自动化部署Qwen3-TTS-12Hz-1.7B-VoiceDesign镜像,实现车载场景下的智能语音交互。该镜像专为驾驶环境优化,支持多场景语音设计和分区输出,可应用于导航提示、娱乐控制和紧急预警,提升驾驶安全与交互体验。
本文介绍了如何在星图GPU平台自动化部署🎵 CLAP Zero-Shot Audio Classification Dashboard镜像,实现车载环境下的智能语音交互。该技术通过零样本学习能力,无需预训练即可在嘈杂车内环境中准确识别语音指令,如空调调节、音乐切换和导航控制,显著提升驾驶安全与交互体验。
本文介绍了如何在星图GPU平台自动化部署🎙️ CosyVoice-300M Lite轻量级语音合成引擎,实现车载导航语音的快速生成。该方案专为资源受限环境优化,提供高质量语音播报,可轻松集成到车载系统,用于实时导航提示、多语言语音合成等典型应用场景,提升驾驶体验。
本文介绍了如何在星图GPU平台自动化部署VibeVoice实时语音合成系统,实现车载语音交互功能。该系统通过高质量语音合成技术,为驾驶员提供智能导航指引、车辆控制和安全提醒等服务,显著提升驾驶安全性和交互体验,特别适用于嘈杂的车内环境。
本文介绍了如何在星图GPU平台自动化部署阿里“小云”语音唤醒模型(KWS),实现车载环境下的高效语音交互。该方案能准确识别唤醒词,适用于驾驶场景中的语音控制,如调节空调、导航等操作,提升行车安全与交互体验。
本文介绍了如何在星图GPU平台自动化部署⚡ Qwen3-0.6B-FP8极速对话工具镜像,实现车载Linux系统的嵌入式AI语音交互。该方案通过FP8量化技术,在本地离线环境下提供快速响应的智能对话功能,适用于导航查询、车辆控制等典型车载场景,提升驾驶体验与操作效率。
本文介绍了如何在星图GPU平台自动化部署🗣️ ChatTTS-究极拟真语音合成镜像,实现车载导航语音的自然合成。该技术能生成带情感、停顿和气息变化的拟真人声,应用于提升车载导航体验,让语音提示更人性化,缓解驾驶疲劳,增强行车安全。
本文介绍了如何在星图GPU平台上一键自动化部署fish-speech-1.5镜像,快速构建高质量文本转语音(TTS)系统。该镜像支持智能硬件和车载环境,能生成自然流畅的多语言语音,适用于智能音箱播报、车载导航提示等丰富应用场景,显著提升人机交互体验。
本文介绍了如何在星图GPU平台自动化部署🎙️ 清音听真 · Qwen3-ASR-1.7B 高精度识别系统,实现车载环境下的语音交互。该系统具备强大的噪声抑制和方言适应能力,可应用于驾驶场景中的车辆控制、导航设置和娱乐信息查询,提升驾驶安全与交互体验。
本文介绍了如何在星图GPU平台自动化部署Fish-Speech-1.5镜像,实现车载语音交互系统的快速搭建。该镜像支持多语言语音克隆与情感化表达,典型应用于智能车载助手,可通过自然语音控制导航、空调及娱乐系统,提升驾驶安全与体验。
本文介绍了如何在星图GPU平台自动化部署VibeVoice实时语音合成系统镜像,实现车载环境下的低延迟语音交互。该系统能将响应延迟降至300毫秒,应用于智能导航、娱乐控制和车辆状态查询等场景,显著提升驾驶安全性和交互自然度。
本文介绍了如何在星图GPU平台自动化部署Fish-Speech-1.5镜像,实现车载环境下的安全语音交互。该方案利用镜像的低延迟和抗噪能力,在本地离线完成语音合成与识别,典型应用于驾驶中的导航控制、音乐切换等场景,提升交互安全性与自然度。
本文介绍了如何在星图GPU平台上自动化部署🗣️ ChatTTS-究极拟真语音合成镜像,实现车载导航系统的人性化语音播报。该技术通过智能语气预测和噪音优化,能够生成自然、亲切的导航提示音,例如在转弯或路线纠正时进行拟人化播报,显著提升驾驶体验和安全性。
2022年:VG710获得ITxPT认证,迈出第一步↓2023年:VG814获得ITxPT认证,产品矩阵初步成型↓2024年:正式成为ITxPT协会协作会员,从“产品合规”升级为“标准参与”↓至今:形成覆盖车载网关(VG710/VG814/VG710-M)、车载路由器(VR624)、驾驶员终端(MDT600)的完整产品矩阵映翰通是目前中国工业物联网企业中,在ITxPT领域布局最完整、认证产品最丰富
CAN = Controller Area Network,控制器局域网一种串行通信总线,主打:多设备组网、抗干扰、高可靠、实时性强,现在汽车、工业自动化、电梯、机器人、新能源设备标配。下面分:是什么 → 特点 → 接线 → 帧格式 → 速率 → 常见类型 → 日常术语,全程大白话,不堆砌晦涩理论。一、CAN 到底是干嘛的?(举例子秒懂)生活类比普通串口(RS232/TTL):一对一打电话,A 只
NIST合规的对称以及非对称加密和哈希算法、侧信道对策(AES/RSA/ECC)、独立并行信道、硬件钥匙访问控制(KAC)(基于规则,增强硬件访问控制的对称钥匙)、16xAES,4xRSA/ECC钥匙孔、硬件密钥隔离(仅针对AES钥匙孔)、读保护(仅针对AES钥匙孔)、硬件钥匙孔函数、密钥包装/解包功能(AES->AES钥匙孔)、钥匙从钥匙孔分离(KDF->AES钥匙孔)、随机钥匙生成(RNG->
本文介绍了在英飞凌TC334芯片上配置ADC采样模块的方法。主要内容包括:通过传感器将物理量转换为电压信号,使用ADC模块将模拟量转换为数字量;创建工程并编写代码实现ADC采样功能,包括初始化配置、转换组设置、通道配置以及数据读取;通过定时器中断周期性采集数据,并通过CAN总线发送采样结果。文章提供了完整的代码实现,涵盖了ADC模块初始化、采样参数配置和数据传输流程,为嵌入式系统中模拟信号采集提供
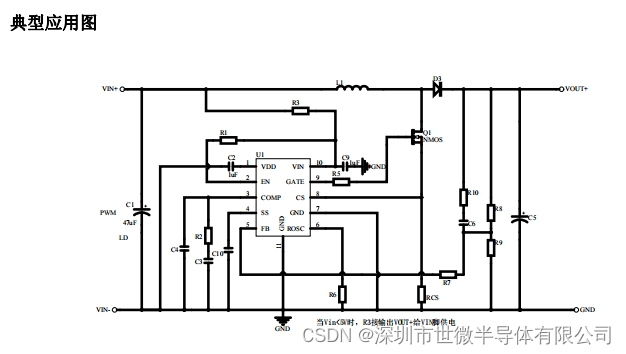
ROSC 悬空,开关频率为 130KHz,当 ROSC 拉高,制驱动芯片,适用于 2.8-40V 输入电压范围的升压恒。接 VIN 的时候,系统正常工作,当 EN 脚位被拉低,开关频率为 260KHz,如果需要别的开关频率,可以在。此外芯片还可以通过 ROSC 脚设置系统开关频率,当。芯片支持软启动功能,调节 SS 端口的电容大小,可以。系统关机,此时流入芯片内部的电流小于 2uA,进入。保护,当
刚开始学习CAN/CANFD协议的朋友肯定在网络上看到了很多CAN/CANFD各种帧类型的描述,这里再把图贴出来,方便大家对照后面的实际波形。下面是使用CANOE的CANIG模块发出实际的CAN/CANFD的各种帧,然后用逻辑分析仪实测的波形图。
商业航天领域的发展对电子系统的可靠性和抗辐照能力提出了更高要求。本文深入探讨了抗辐照加固CANFD芯片如何借助车规级设计,增强商业航天系统的可靠性。本文以国科安芯CANFD芯片ASM1042为例,通过对芯片单粒子效应脉冲激光试验报告、数据手册及芯片测试报告的分析,阐述车规级设计在提升芯片抗辐照性能、功能安全性和环境适应性等方面的关键作用,为商业航天电子设备的国产化和高性能发展提供了理论依据和技术支
车载系统
——车载系统
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区


 AI Agent技术社区
AI Agent技术社区

 人工智能6S服务平台
人工智能6S服务平台

 DAMO开发者矩阵
DAMO开发者矩阵
 EazyDevelop社区
EazyDevelop社区

 AMD开发者中国社区
AMD开发者中国社区






















 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区