登录社区云,与社区用户共同成长
邀请您加入社区
自带硬接线 TCP/IP 芯片:有 W5500、W5100S、W6300 三个版本可选,不用自己实现协议栈,网络稳定性直接拉满,W5500 还过了 AWS 物联网认证,做项目也很稳。基础外设:GPIO、UART 串口、I2C/SPI 通信、定时器 / PWM,附 MicroPython 类的使用方法(比如 machine.UART/machine.I2C)详解 WIZnet-EVB-Pico2
上位机开发板主要负责运行系统环境、ROS2、SLAM建图、Navigation2导航、多传感器融合、AI算法推理、大语言模型、Qt人机界面等应用,并通过CAN、RS485、串口等接口向STM32等下位机发送速度、转向、机械臂动作等控制指令。对于服务机器人、AGV、AMR、巡检机器人、配送机器人等项目,RK3588已经能够满足大多数应用需求。再次是丰富的工业接口,包括USB、CAN、RS232、RS
本文是Arm Ethos-U65学习笔记第五篇,聚焦于YOLOv8n目标检测示例的硬件验证阶段。文章详细介绍了将Vela编译生成的命令流导入芯片仿真环境执行推理验证的完整流程。整个过程不仅适用于芯片仿真验证,对裸机环境下的软件开发也具有参考价值,为嵌入式AI加速器部署提供了实用指导。
飞腾E2000模块
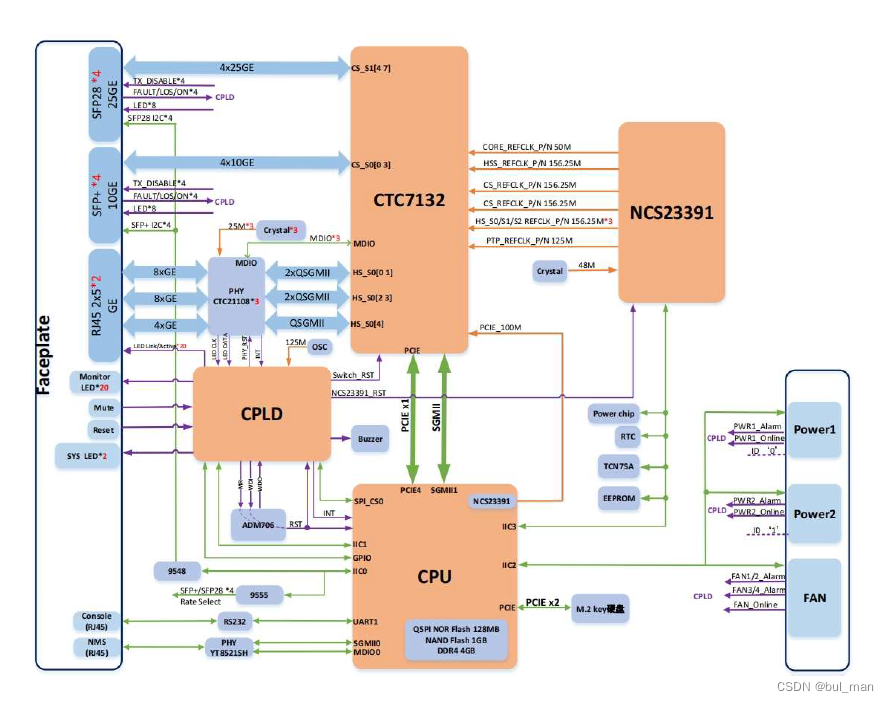
盛科7132, FT-2000,交换机
结合通过上述描述,我画了一张图描述状态和特权级的切换,比较好理解,便不过多赘述。
数字焊机与工业机器人通信网关是连接焊机与机器人的核心设备,需解决协议不兼容、实时性不足、多设备协同等问题。本设计基于RT-Thread实时操作系统,采用EtherCAT(机器人侧)与CANopen(焊机侧)协议,实现焊机与机器人的高速、可靠通信,支持实时数据采集、远程控制、状态监测等功能
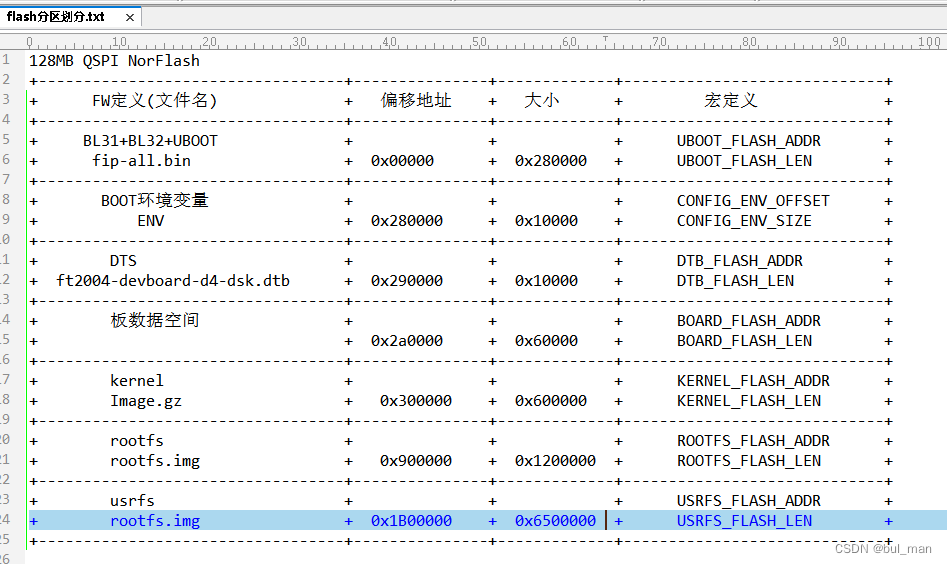
飞腾E2000Q, 128M QSPI FLASH
大家好,我是ZLinear的硬件工程师。在之前的系列博文中,我们从LHAMP188的零漂移技术聊到了拨码增益切换与差分单端测量的实战技巧,几乎把模拟前端的每一个细节都拆了个遍。但在后台,有做精密仪器和工业数据采集的读者问了一个非常“系统级”的问题:“张工,前端的仪表放大器你们讲透了,那放大完的信号怎么送到数字世界去?你们那个18位、8通道的ADC芯片,到底靠什么做到250kSPS的吞吐率、还能一个
满栈 (Full Stack):栈指针(SP)指向最后一个压入的数据。压栈时,先移动指针,再写入数据(空栈 (Empty Stack):栈指针(SP)指向下一个空闲位置。压栈时,先写入数据,再移动指针(或增栈 (Ascending Stack):压栈时,栈指针向高地址方向移动(SP增加)。减栈 (Descending Stack):压栈时,栈指针向低地址方向移动(SP减少)。
本文是 Arm Ethos‑U65 解析的第四篇。接下来的两篇将基于 U65 实现一个 YOLOv8n 目标检测示例,该示例通过导入 Vela 工具生成的命令流来触发 U65 NPU 执行推理运算,最终在芯片仿真验证环境中输出结果,示例同时对裸机环境下的软件开发也有一定参考价值。
NOR Flash 像内存一样可以直接读取和执行代码,适合存放启动程序;NAND Flash 容量大、成本低,适合存放操作系统、文件系统等大块数据。
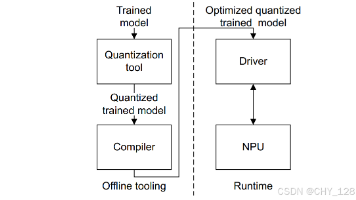
本文介绍了NPU编程模型和实现流程,分为离线工具链(模型训练、量化、Vela编译生成命令流)和运行流程(Arm NN驱动执行)。详细说明了NPU的寄存器配置(BASE、BASE_POINT、ID和PMU区域)、命令流结构(32位cmd0和64位cmd1指令)及其分类(运算、配置、DMA等)。最后提及权重采用无损压缩算法(零值序列编码和Golomb-Rice编码),确保与tflite模型结果一致。整
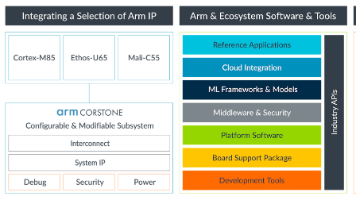
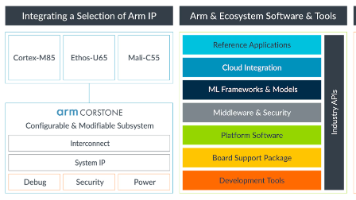
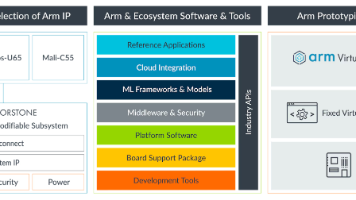
Arm Ethos-U65是一款面向边缘计算的NPU IP核,专为低功耗机器学习推理设计,算力达1TOPS,支持8bit量化TensorFlow Lite模型。硬件架构包含控制单元、DMA控制器、MAC运算单元等模块,采用NHWC/NHCWB16数据格式,支持多种数据精度和卷积/深度卷积等算子。典型应用场景如恩智浦i.MX93处理器,需搭配Cortex-M处理器完成前后处理。该IP通过Vela编译
万象奥科基于RK3576推出了HD-RK3576-UGFC金手指核心板、HD-RK3576-B2B板对板核心板和RK3576 CM5 兼容板 板对板核心板,以适配不同的产品结构、底板设计及接口扩展需求。下文将从连接形态、板卡尺寸、内存与存储配置、网络通信、视频接口、工业接口、工作温度及操作系统等维度,对万象奥科RK3576系列核心板的主要参数进行介绍,帮助用户根据产品空间、算力需求、接口资源和部署
本文深入探讨了基于炬芯P1(ATS3085)和R1(ATS6095)芯片的智能蓝牙音频设备开发全流程,从底层硬件架构到上层应用开发,覆盖了十个关键层级。主要内容包括: 底层基础:详细解析了ARM Cortex-M架构在蓝牙音频设备中的应用,重点介绍了HardFault分析器、中断系统和内存管理等核心机制。 RTOS与驱动开发:探讨了任务调度、IPC通信机制以及I2S/PDM等音频外设的驱动实现,提
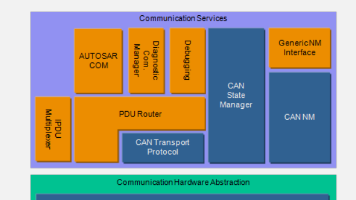
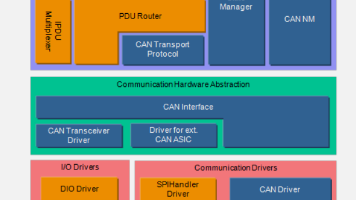
本文深入解析AUTOSAR CP R23-11标准中的CAN接口模块(CanIf),重点介绍其在通信架构中的核心作用与实现细节。作为Com服务层与底层Can驱动间的"总调度",CanIf承担硬件无关的通信逻辑,通过抽象概念(L-PDU/L-SDU、HOH/HRH/HTH等)实现标准化接口。文章详细剖析了模块初始化流程、数据收发机制(BasicCAN/FullCAN模式)、软件过滤策略及硬件对象管理
LSM6DSV16X移植
链接脚本定义段地址。
摘要:本文深入解析AUTOSAR 23-11中的CAN接口模块(CanIf),阐述其作为Com层与CanDrv间抽象接口的核心功能。重点剖析CanIf的架构设计,包括硬件无关的通信逻辑、L-PDU管理及BasicCAN/FullCAN模式差异。详细说明HRH/HTH对硬件邮箱的抽象机制、数据流处理(发送缓冲策略、接收过滤)以及多控制器协同工作流程(初始化、BusOff处理、唤醒检测)。通过分析Ca
深入操作系统 Socket 底层:套接字控制块、FD映射、阻塞IO核心完整实现
云手机是基于云计算技术的虚拟移动设备,通过云端服务器完成运算和渲染,本地仅传输指令和画面。相比传统手机,云手机突破硬件限制,实现全天候在线、跨设备无缝切换和灵活扩容,解决卡顿、续航差等问题。适用于娱乐挂机、移动办公和轻量运维等场景,提升使用效率。云手机并非替代实体设备,而是对移动体验的升级补充,代表未来轻量化、云端化的发展趋势。
回到工程本身,Cube Sandbox v0.5.0 的关键并不只是“支持 Arm”,而是把 Agent 沙箱在 AArch64 环境中必须跨过的几道门槛逐一补齐,让Arm架构不再只是 Cube Sandbox 的一个兼容目标,而开始成为 Agent 安全执行环境中可构建、可启动、可验证的真实运行选项。对于正在 Arm 服务器上构建 AI Agent 工作流、Agentic RL 训练平台或代码执
本文档详细介绍了在STM32H743平台上移植Mongoose自带TCP/IP协议栈的完整过程,结合CMSIS-RTOS2(基于FreeRTOS)实现网络通信功能。主要内容包括: 硬件平台配置:STM32H743+LAN8720 PHY(RMII接口) 软件架构设计: 采用STM32 HAL驱动层 使用CMSIS-RTOS V2接口适配FreeRTOS 集成Mongoose网络协议栈 关键移植步骤
安全方面,CubeSandbox 的核心价值是给每个 AI Agent 提供独立、安全的执行环境——Agent 执行代码时不会影响宿主服务器,也不会干扰其他 Agent。AI Agent 沙箱尤其复杂——它不是普通的应用软件,而是一个为每个 Agent 创建独立运行环境的底层系统,涉及操作系统内核、网络隔离、安全防护等最基础的计算能力。双方经过近两个月的深度联合开发,攻克了 AI Agent 沙箱
2026年AI智能体迎来产业爆发,成为人工智能落地核心方向。其突破传统大模型的被动模式,具备自主规划、执行和迭代能力,通过四大核心模块实现复杂任务闭环处理。当前已渗透办公、编程、金融、制造等领域,显著提升效率。但面临泛化能力不足、安全风险和算力成本等瓶颈。作为"自主生产力"代表,AI智能体正推动AI从工具向基础设施升级,开启产业智能化的新时代。
风险:如果只是一行小错误,后面的好行也不会处理。适合“日志里偶尔坏一行,不影响整体处理”的场景。,一旦遇到一行坏数据,就整个处理停掉,不太合适。日志可能很大,偶尔有乱码/截断/部分写入失败。,坏行跳过,不影响后面分析,鲁棒性更好。适合“文件坏了就不再处理”的场景。→ 丢掉,继续下一行。
本文介绍了在实时Linux环境下使用Rust进行用户态编程的实践方法。实时Linux操作系统因其低延迟和高可靠性,成为工业自动化、自动驾驶、金融交易等实时应用的首选平台。教程重点讲解了实时任务特性、调度策略配置(如SCHED_FIFO)、CPU亲和性设置、内存锁定等关键技术,并提供了使用Rust的nixcrate、no_std模式、自定义分配器和FFI接口的代码示例。通过合理运用这些技术,开发者可
在树莓派(Raspberry Pi)、Orange Pi 等 ARM 架构设备上,传统环境管理工具(如 Conda)常因32 位 armv7l 架构兼容性出现问题(如找不到 Python 3.10+ 包、SSL 验证失败)。而「apt + venv」方案是专为这类设备设计的轻量化选择,核心优势如下:✅系统原生适配:与 Raspbian、Armbian 等 ARM 系统完美兼容,无架构冲突✅零配置门
在DeepSeek的实现中,透明化包括模型架构的可解释性、决策过程的溯源性以及训练数据的可审计性。这种转变在医疗诊断、金融风控、司法辅助等高风险领域尤为重要,因为在这些场景中,单纯的预测准确性不足以建立真正的信任。DeepSeek作为前沿的AI模型,其算法透明化实践正在引领一场深刻的技术革命,这不仅关乎技术本身的发展,更关系到人工智能与社会信任体系的深度融合。DeepSeek的实践表明,透明化不仅
在ARM架构上部署Python Web应用,结合Docker和Nginx,可以有效降低硬件和运维成本。Nginx作为反向代理,能高效处理静态内容和负载均衡,减轻后端压力,从而优化资源使用。本方案将逐步指导您实现部署,并重点强调成本优化措施,如资源限制、高效镜像和缓存配置。创建Dockerfile,使用ARM兼容的基础镜像(如Alpine Linux版本),减少镜像大小和启动时间。优化镜像层能降低存
如果服务端要提供文件传输的功能,我们能想到的最简单的方式是:将磁盘上的文件读取出来,然后通过网络协议发送给客户端。传统 I/O 的工作方式是,数据读取和写入是从用户空间到内核空间来回复制,而内核空间的数据是通过操作系统层面的 I/O 接口从磁盘读取或写入。
在全球数据中心算力向低功耗高效能转型的浪潮下,正成为重构云计算、AI推理底层算力体系的核心支柱赛道。据QYResearch(北京恒州博智国际信息咨询有限公司)权威统计,2025年全球ARM服务器芯片市场销售额已达61.70亿美元,预计2032年将攀升至152.0亿美元,2026-2032年复合增长率(CAGR)高达13.6%,远超传统X86服务器芯片行业7%左右的平均增速,是半导体领域成长确定
关键点:Rust 的交叉编译简化了跨平台适配;性能验证应使用真实负载测试;云端容器化确保弹性部署。最佳实践优先使用纯 Rust crate 避免 C 依赖。在 CI/CD 管道集成 ARM 测试(如 GitHub Actions)。监控生产环境性能,持续优化。潜在挑战:ARM 架构可能引入新错误(如字节序问题),需全面测试。通过以上步骤,您可以高效实现 Rust 应用的跨平台部署,并在云端验证性能
arm开发
——arm开发
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区
 DAMO开发者矩阵
DAMO开发者矩阵
 openvela
openvela
 深开鸿 技术专区
深开鸿 技术专区




 鲲鹏昇腾开发者社区
鲲鹏昇腾开发者社区
 openEuler 社区
openEuler 社区


 AMD开发者中国社区
AMD开发者中国社区







 AI Agent技术社区
AI Agent技术社区

 AI硬件创业社区
AI硬件创业社区