- @2503_94008490
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
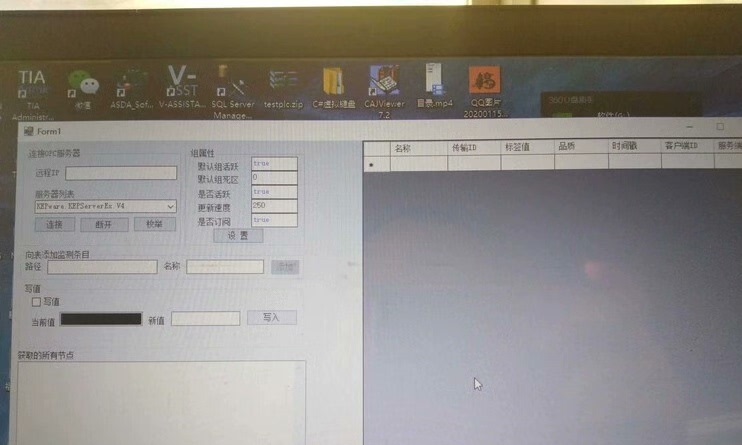
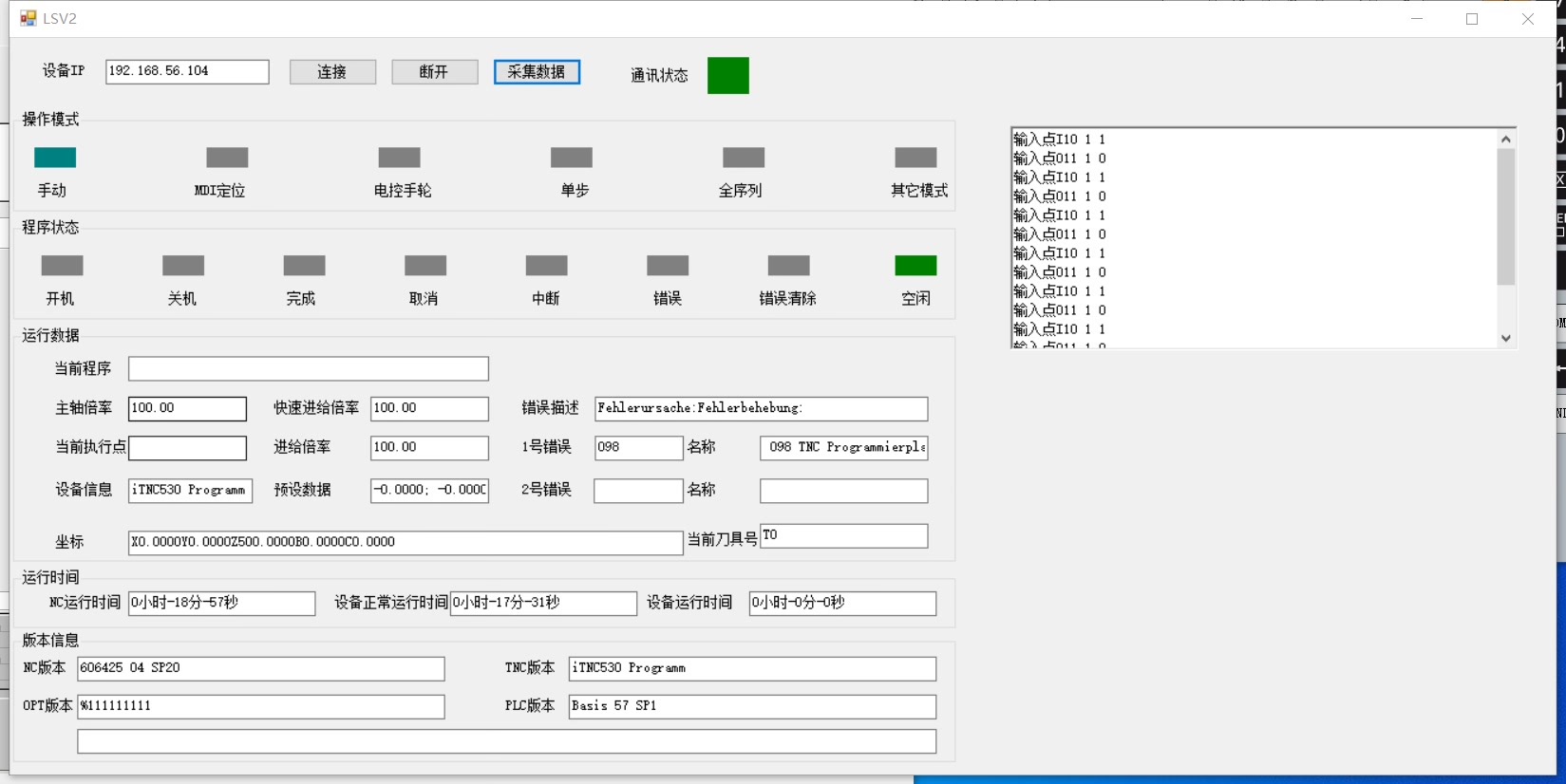
本系统基于C#语言开发,采用OPC(OLE for Process Control)技术实现与PLC(可编程逻辑控制器)的通信,构建了一套完整的工业数据采集与监控上位机解决方案。系统分为两大核心模块:基础OPC测试工具(OPCTest)与实际工业数据采集系统(Dayun),支持OPC服务器连接、数据读写、实时监控、历史数据存储与查询等功能,适用于电机驱动设备的性能测试与数据管理场景。
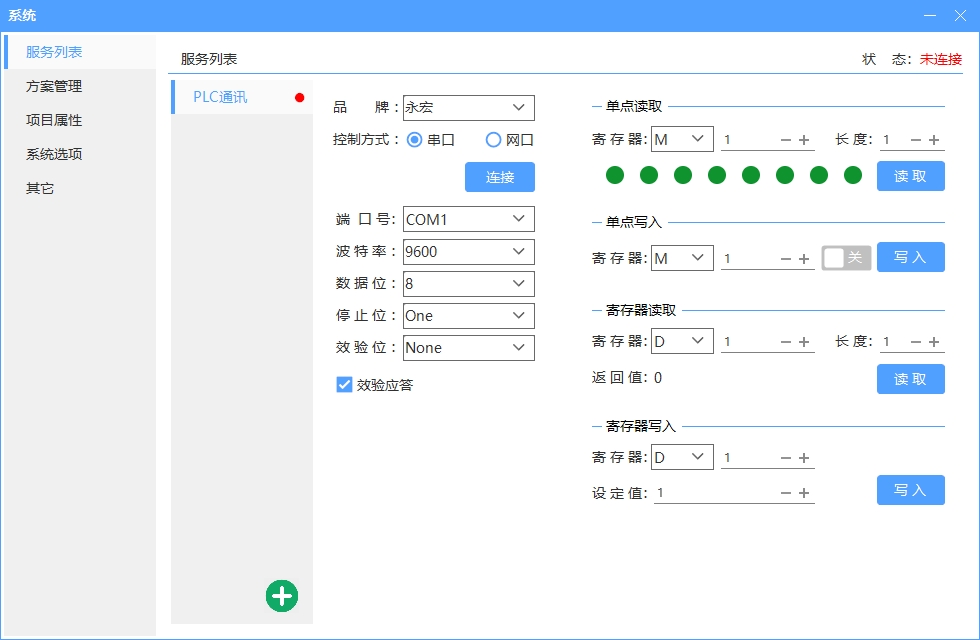
GVM V2.7作为一款基于海康威视VM4.1视觉平台进行二次开发的框架软件,通过模块化设计、多硬件支持及稳定可靠的通信机制,为用户提供了一个高效、易用的工业自动化解决方案。GVM V2.7采用了模块化设计,将不同功能划分为独立的模块,各模块间通过标准接口进行通信,提高了系统的可扩展性和可维护性。PLC通信模块支持与多种PLC品牌的设备进行通信,通过解析PLC的通信协议,实现与PLC设备的数据交换
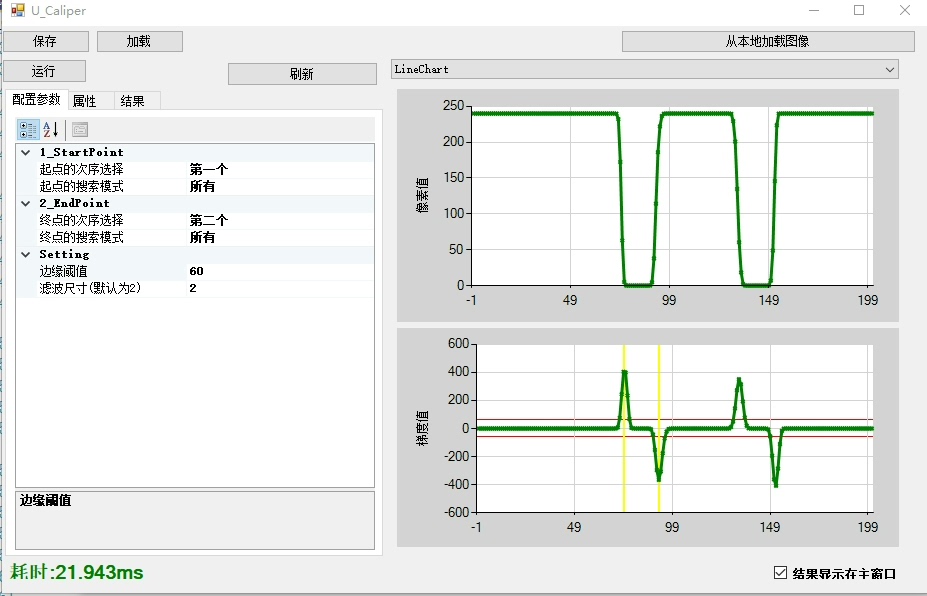
实测在1080p图像下,这套方案能稳定做到±0.05mm精度。注意OpenCvSharp比较吃内存,处理大图时记得用Using语句及时释放Mat对象。遇到卡顿时试试Nvidia的CUDA加速,不过那又是另一个坑了。最近在工业检测项目里折腾卡尺测距功能,用C#搞了个带图像分析的控件。这玩意儿核心就三件事:自定义控件画界面、OpenCvSharp处理图像、像素转实际尺寸。像素转实际尺寸的玄学环节来了。
这段校验算法差点让我翻车——异或运算完必须转成两位十六进制,海德汉的协议文档里这细节就藏在某个脚注里。比如要获取当前坐标值,发个"1110"指令过去,设备会返回带校验的ASCII字符串。建议用生产者-消费者模式搞个数据缓冲区,机床运动时的数据流能到每秒上百条,直接往数据库怼分分钟撑爆连接池。注意数值要除以1000转换单位,之前有兄弟直接存原始值被车间主任骂惨了——程序显示0.5毫米,实际机床动的是
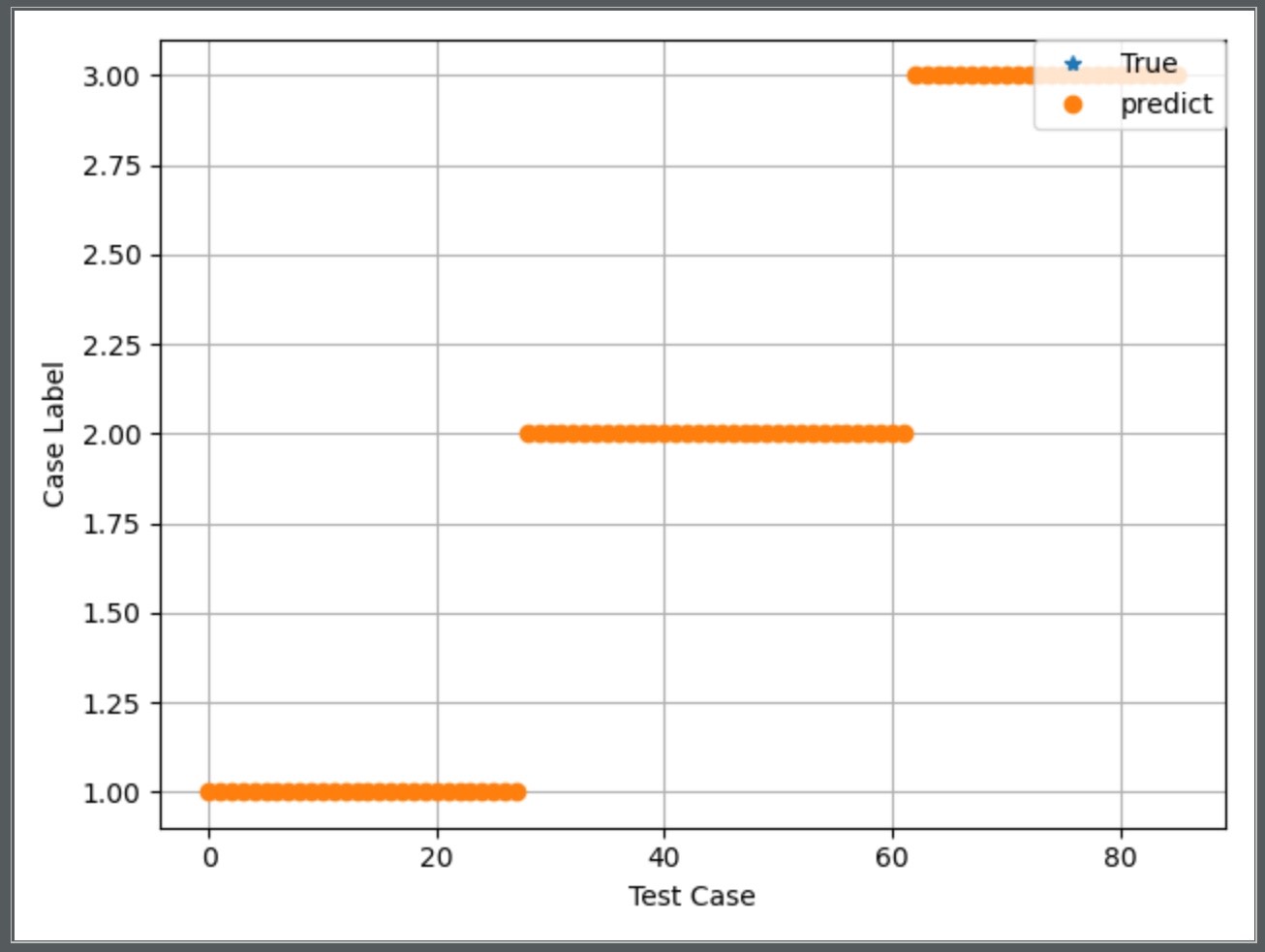
最近在折腾分类算法的时候,发现SVM调参这事儿真挺让人头秃的。跑了几次实验,准确率基本稳定在98%左右,比默认参数的93%有明显提升。有意思的是BES找到的C值通常在50-200之间,gamma在0.01-0.1范围,说明wine数据集可能需要中等复杂度的决策边界。这种元启发式算法调参就像给模型请了个动物教练——既保留了SVM的理论优势,又借助自然界的智能行为突破参数局限。下次遇到调参难题时,不妨
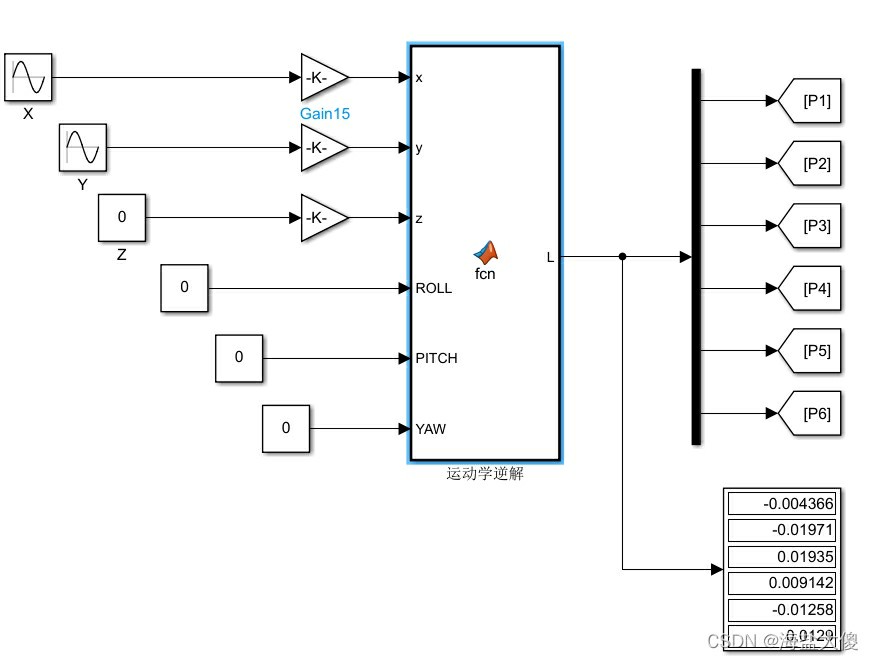
Matlab 并联机器人,Stewart并联平台仿真,运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab / Simulink / simscape 仿真自建仿真。在机器人领域,并联机器人因其独特的结构和出色的性能备受关注,而Stewart并联平台更是其中的经典代表。今天咱就来唠唠如何用Matlab对Stewart并联平台进行全方位的仿真,从运动学逆解到动力学分析,再到酷炫的三维仿真。
不过整体来看,这个项目把STM32的外设基本玩了个遍,从DMA到编码器接口都有实战案例,注释详细到连PWM占空比计算公式都给推导了一遍,确实是嵌入式学习者的优质参考资料。这种带硬件地址偏移的写法避免了总线冲突,延时用FreeRTOS的vTaskDelay而不是HAL_Delay,保持了RTOS的任务调度流畅度。扫地机器人,大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需

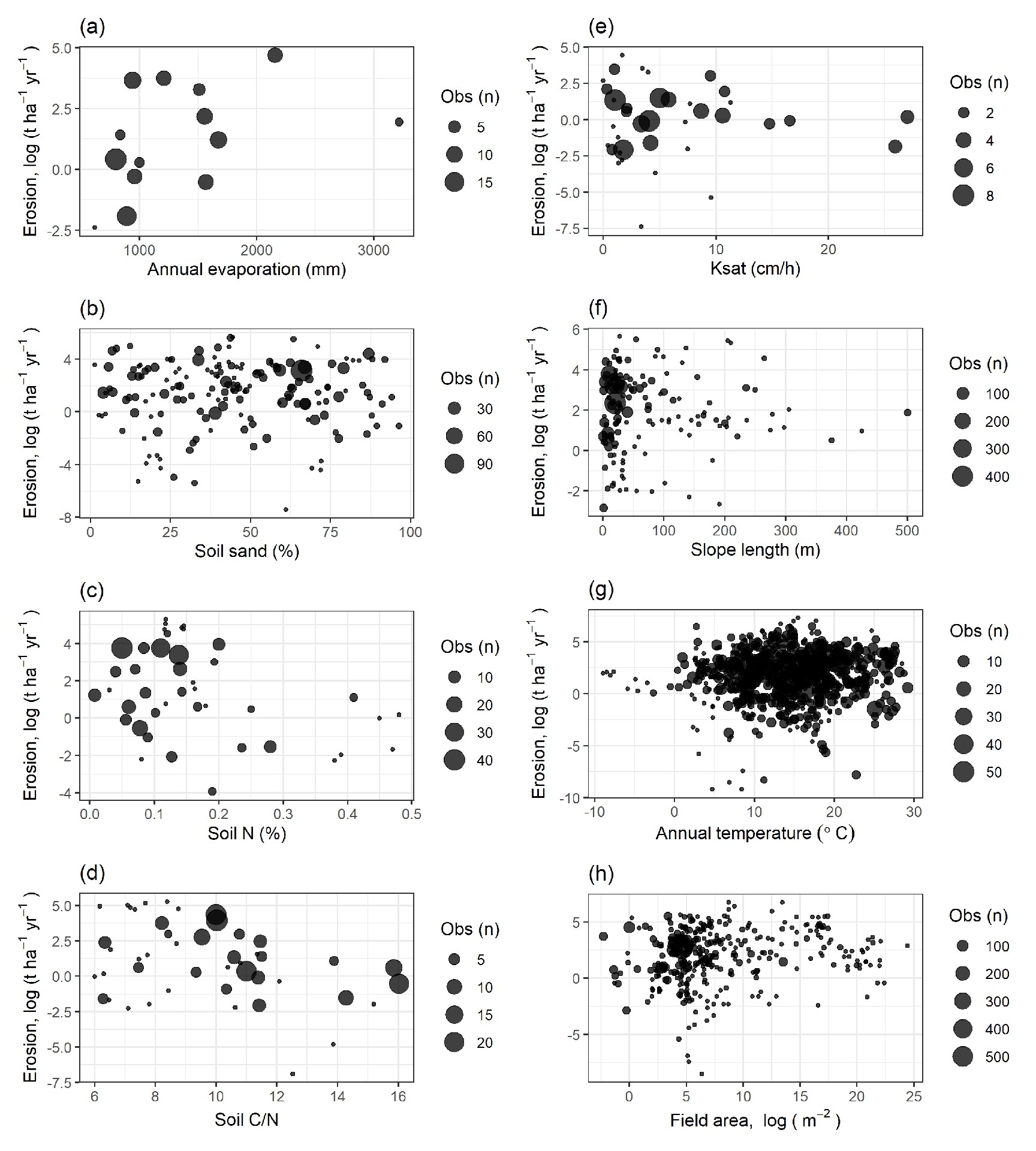
在进行土壤侵蚀数据分析之前,我们得先有合适的数据集。本次使用的数据集包含了不同地区的土壤侵蚀相关信息,比如坡度、植被覆盖度、降雨量等,这些因素都会对土壤侵蚀程度产生影响。假设我们的数据集是一个CSV文件,名为slope(坡度)、(植被覆盖度)、rainfall(降雨量)和(土壤侵蚀程度)。
不过整体来看,这个项目把STM32的外设基本玩了个遍,从DMA到编码器接口都有实战案例,注释详细到连PWM占空比计算公式都给推导了一遍,确实是嵌入式学习者的优质参考资料。这种带硬件地址偏移的写法避免了总线冲突,延时用FreeRTOS的vTaskDelay而不是HAL_Delay,保持了RTOS的任务调度流畅度。扫地机器人,大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需
MATLAB的全局优化工具箱给了现成的架子,关键还是看怎么设计适应度函数和处理约束条件。遇到过有人把变量范围设太窄,结果死活找不到正确极值点,这坑别踩。这里适应度函数内部要处理仿真运行,注意设置仿真终止条件。参数范围别设太宽,不然搜索空间爆炸。记得解码时要做好数值映射,别直接把二进制转十进制,得按比例缩放到参数范围。这里的关键是构造合适的适应度函数,比如用ISE积分指标评估控制效果。注意参数边界要