




- @ktnavigation
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
MEMS陀螺凭借微型化、低成本和高可靠性等优势,在卫星姿态控制、轨道确定和故障监测中发挥关键作用。通过与星敏感器、太阳辐射传感器等互补传感器融合,MEMS陀螺可实现高精度姿态控制。开拓导控KT-EX3-26等产品已成功应用于星载环境,展现出色性能。未来,MEMS陀螺有望从辅助传感器发展为卫星导航系统的核心组件,推动商业航天发展并降低成本。
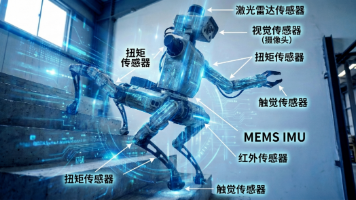
摘要: MEMS惯性测量单元(IMU)成为爬楼机器人突破稳定性、环境适配与成本瓶颈的关键技术。通过实时监测加速度、角速度等数据,MEMS IMU(如S6507模组)解决了复杂地形下的重心调节、极端环境适应及多传感器协同问题。其小体积、低功耗、高动态响应(2000Hz)特性,结合力传感器、视觉SLAM等融合算法,显著提升机器人在医疗、工业及救援场景的运动稳定性。多传感器协同与算法优化进一步强化了机器
开拓导控旗下的MEMS陀螺模组,惯性测量模组,运动传感器,航姿参考模组等产品具有采用科学减振措施,有效降低振动对产品输出指标的影响。系统级安装设计:尽可能远离如发动机、推进器、电机、齿轮箱、风扇等主要振动源:确保IMU安装支架或底座本身具有足够的刚度和强度,避免支架自身共振放大振动,采用刚性连接件,避免松动。采用减震材料:使用具有高阻尼特性的弹性材料,利用材料的弹性和内摩擦消耗振动能量,降低传递到

摘要: MEMS惯性测量单元(IMU)成为爬楼机器人突破稳定性、环境适配与成本瓶颈的关键技术。通过实时监测加速度、角速度等数据,MEMS IMU(如S6507模组)解决了复杂地形下的重心调节、极端环境适应及多传感器协同问题。其小体积、低功耗、高动态响应(2000Hz)特性,结合力传感器、视觉SLAM等融合算法,显著提升机器人在医疗、工业及救援场景的运动稳定性。多传感器协同与算法优化进一步强化了机器
摘要: MEMS惯性测量单元(IMU)成为爬楼机器人突破稳定性、环境适配与成本瓶颈的关键技术。通过实时监测加速度、角速度等数据,MEMS IMU(如S6507模组)解决了复杂地形下的重心调节、极端环境适应及多传感器协同问题。其小体积、低功耗、高动态响应(2000Hz)特性,结合力传感器、视觉SLAM等融合算法,显著提升机器人在医疗、工业及救援场景的运动稳定性。多传感器协同与算法优化进一步强化了机器
根据《GJB7952-2012振动陀螺仪测试方法》的定义,零偏重复性(biasrepeatability)是指在同样的条件下及规定时间间隔内,多个工作周期的零偏之间的一致程度。在实际使用过程中,零偏重复性水平是衡量IMU性能的一个关键指标,其重要性不容小觑。零偏重复性差会导致IMU在多个工作周期内的测量结果存在较大差异,从而增加因零偏变化带来的系统误差,难以保持稳定、可靠的数据输出。在一些恶劣的环
