登录社区云,与社区用户共同成长
邀请您加入社区
这段代码实现了STM32的CAN1通信功能,主要包括:1. CAN初始化函数can_init(),配置波特率、工作模式等参数;2. 底层硬件初始化HAL_CAN_MspInit(),设置CAN引脚和时钟;3. 过滤器配置,控制接收哪些ID的报文;4. 发送函数can_send_msg(),支持标准帧数据发送;5. 接收函数can_receive_msg(),查询方式读取数据;6. 中断处理函数CA
为什么需要这个阶段?很多从应用层转向嵌入式的开发者,对C语言的底层特性理解不深。指针、内存管理、位操作是嵌入式开发的基础,必须扎实掌握。学习目标深入理解指针和内存布局掌握位操作和寄存器访问技巧实现常用数据结构建立代码规范意识硬件平台:STM32系列(STM32F103/F407)学习目标理解ARM Cortex-M架构掌握常用外设驱动开发理解中断机制具备硬件调试能力RTOS平台:FreeRTOS学
GPIO通路采用分层硬件设计,分为输出和输入两条链路。输出方向通过寄存器控制驱动管,输入方向经保护电路和采样寄存器。关键设计包括:1)保护二极管防止高压冲击;2)可编程上下拉电阻(40kΩ)避免信号漂移;3)推挽/开漏两种输出模式(推挽适合强驱动,开漏支持线与逻辑);4)四种工作模式通过开关组合实现。典型问题包括按键抖动需启用上拉、I2C必须开漏模式、ADC需关闭数字电路等。设计核心在于理解硬件链
该芯片集高性能计算处理能力、丰富的图形引擎、低功耗设计、多样化接口支持、便捷触控功能、可靠的安全性与稳定性以及完善的开发生态于一身,这使其在智能家电行业具有极为广泛的应用前景。无论冰箱、空调、洗衣机以及咖啡机等家电产品,借助D12x列芯片,都能通过触控屏幕实现直观且便捷的操作,从而极大提升用户的使用体验。配备强大的2D图形加速、PNG/JPEG解码引擎以及丰富的外设接口,具有高性能、低成本和超低功
本文介绍了STM32中DMA与串口配合实现数据接收的原理及实现方法。通过DMA可以直接将串口接收寄存器中的数据搬运到SRAM,无需CPU干预,提高系统效率。文章详细讲解了DMA请求机制、STM32CubeMX配置步骤(包括时钟设置、串口使能和DMA请求配置),并分析了HAL_UART_Receive_DMA函数的工作原理。最后说明了DMA传输完成后的回调机制,以及如何实现循环接收数据。该方案可显著
引言:本文针对采样电阻位于下桥臂的采样方式,如何采样电阻位于三相线上,请随便采集。
HC32F460芯片锁死的解决方法
全球领先的嵌入式系统开发软件解决方案供应商IAR携手业内领先的芯片及解决方案提供商紫光同芯正式宣布,最新版本的IAR Embedded Workbench for Arm v9.60.3已全面支持紫光同芯第二代汽车域控芯片THA6系列。IAR和紫光同芯的强强联合,不仅为用户带来了高效、安全的开发体验,更有助于推动高端车规级MCU在汽车电子领域的广泛应用,加速汽车电子产业实现转型升级。
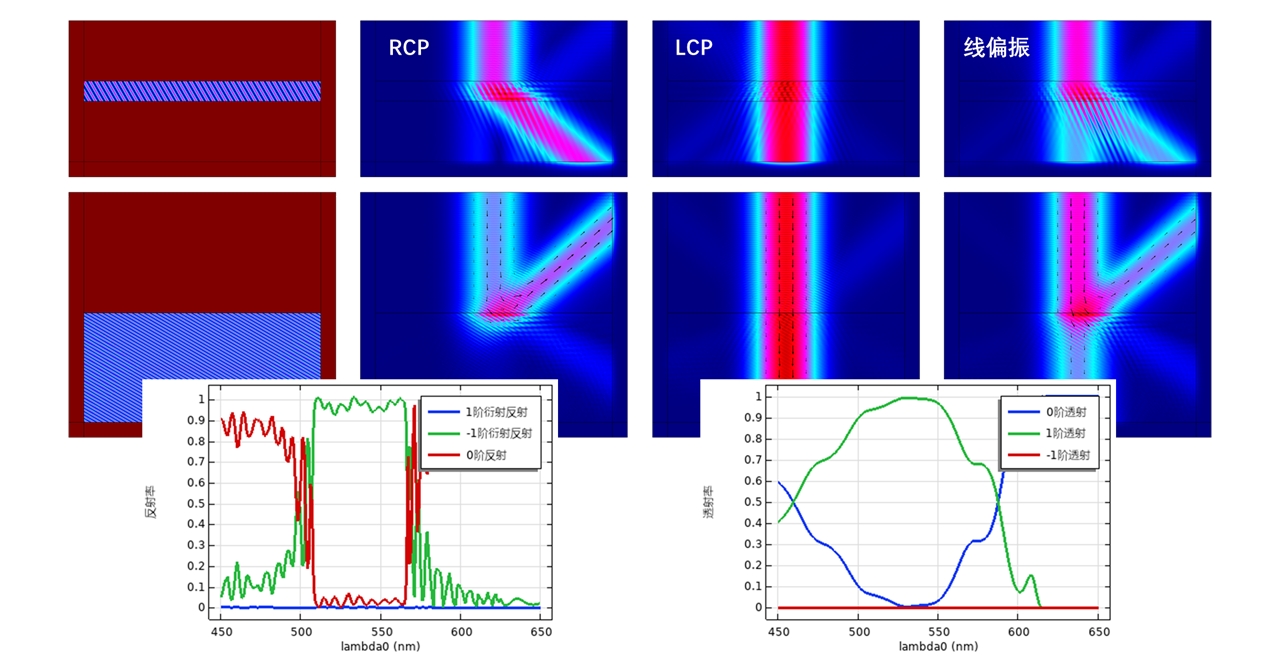
先瞅瞅胆甾相液晶的周期性结构,螺旋轴方向上的周期长度P是关键参数。假设入射光波长是λ,当满足布拉格条件2P·sinθ = mλ时(θ是入射角,m是衍射级次),衍射效率直接拉满。实际测试时会发现,当delta_n超过0.2后,效率提升开始边际递减,这就是液晶材料选择的平衡点。液晶光栅PVG(偏振体积光栅)这玩意儿在AR眼镜和全息显示里特别火,尤其胆甾相液晶那个螺旋结构,能把光的偏振玩出花来。实际跑仿
南山电子代理的CKS32车规系列单片机是中科芯专为汽车等高可靠应用场景研发的 32 位 MCU芯片。针对不同安全等级车规应用对应CKS32F、CKS32K两个产品系列,产品通过AEC-Q100认证,其中CKS32K系列具备ASIL-B安全等级,为汽车电子等对可靠性和安全性要求极高的领域提供了强有力的解决方案。本文将围绕三款系列芯片,从功能参数、应用优势等方面进行详细解析,展现其在车规级应用中的卓越
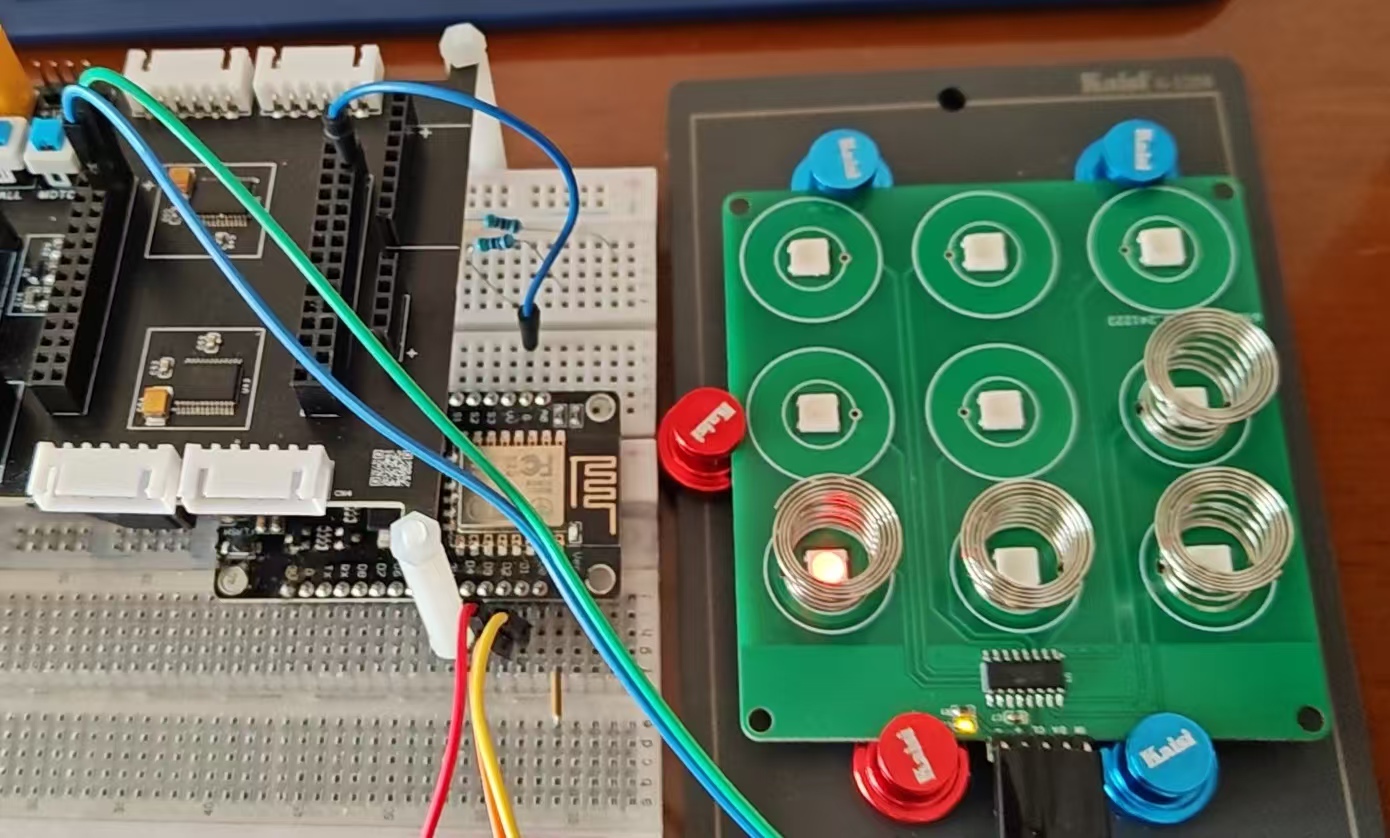
使用ESP8266和BS8112A触摸芯片实现触摸按键功能。
本文介绍了基于CH347/339W芯片搭配SHT40传感器实现I2C温湿度采集功能的过程。
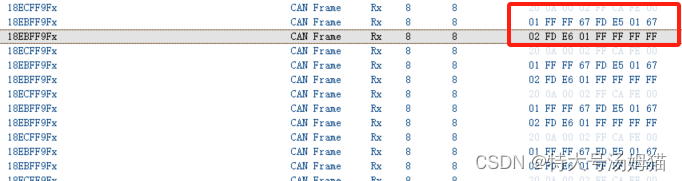
CAN FD 帧的数据场支持最大 64 个字节,可包含的帧类型有单帧 (SF)、 第一帧 (FF)、 连续帧 (CF) 或流控制帧 (FC)。SN根据以下规则定义: 首帧的SN值为 0,连续帧的第一帧SN值为1, 每增加一个连续帧,SN值增加1, 流控制帧不影响SN值的计算,当SN值达到15后,下一个连续帧的SN值为0。---- FirstFrame,0号字节高4位固定为1,低4位加上1号字节组成
TP.CM_BAM 和 TP.DT 是在 SAE J1939 协议中的多包传输 (Transport Protocol, TP) 的特定消息类型,用于管理和传输大量数据。
D12x系列芯片不仅适用于智能家电,其高可靠性、强大图形处理能力和高性价比优势,也使其广泛应用于多个领域。智能家电:白色家电控制面板、厨房电器交互界面、智能家居中控;工业控制:工业串口屏、仪器仪表、工控HMI;其他领域:医疗诊疗仪、儿童教育产品、智能楼宇显示控制器等。从一颗芯片,到一款提升生活品质的智能产品,匠芯创D12x系列正以其高性能、高可靠、高集成的特性,成为智能设备领域转型升级的核心驱动力
电机作为现代电子系统的核心执行部件,是实现 “电能 - 机械能” 转换的关键载体,广泛渗透于工业自动化、智能机器人、消费电子、交通工具等众多领域。从精密设备的微小型驱动到工业生产线的大功率调速,电机的控制性能直接决定了系统的响应速度、运行精度、能耗效率与稳定性。这里分享CW32L012小机器人的正反转、调速的电机控制。
针对精密激光加工行业中激光镜片、加工工件的远距离、窄视场、高精度测温需求,打造免二次开发、易集成、高可靠的非接触式温度监测解决方案。
由于工作需要,所以作者开始学习合泰的芯片,但苦于网上合泰资源较少,合泰论坛的资料也不能免费学习,因此在学习的过程中顺便把一些资料分享出来,和大家一起共同学习交流。
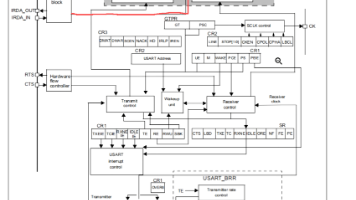
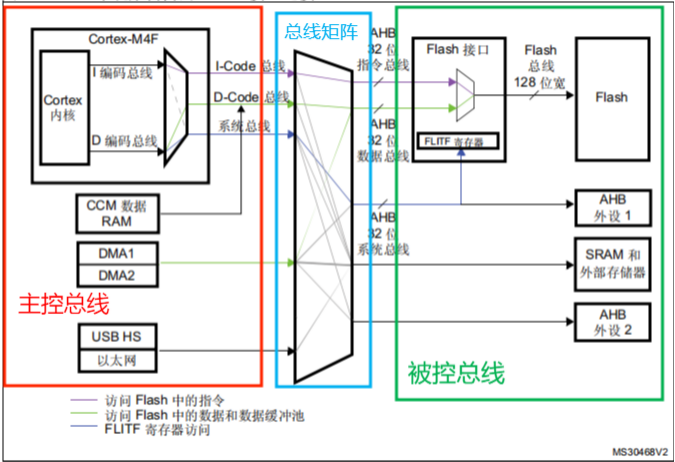
搭建机器人电控系统——MCU基石STM32系统架构STM32时钟配置GPIO是什么中断NVIC与EXTISTM32系统总线架构在对应STM32F4的《参考手册》中,有如下一个系统架构图:从整体来看,STM32系统借助总线矩阵,实现主控总线到被控总线的访问。主控总线①Cortex内核I、D、S总线Cortex-M4:ARM制定的一种内核协议。在选择主控章节说过,ARM制定内核协议,由ST公司根据内核
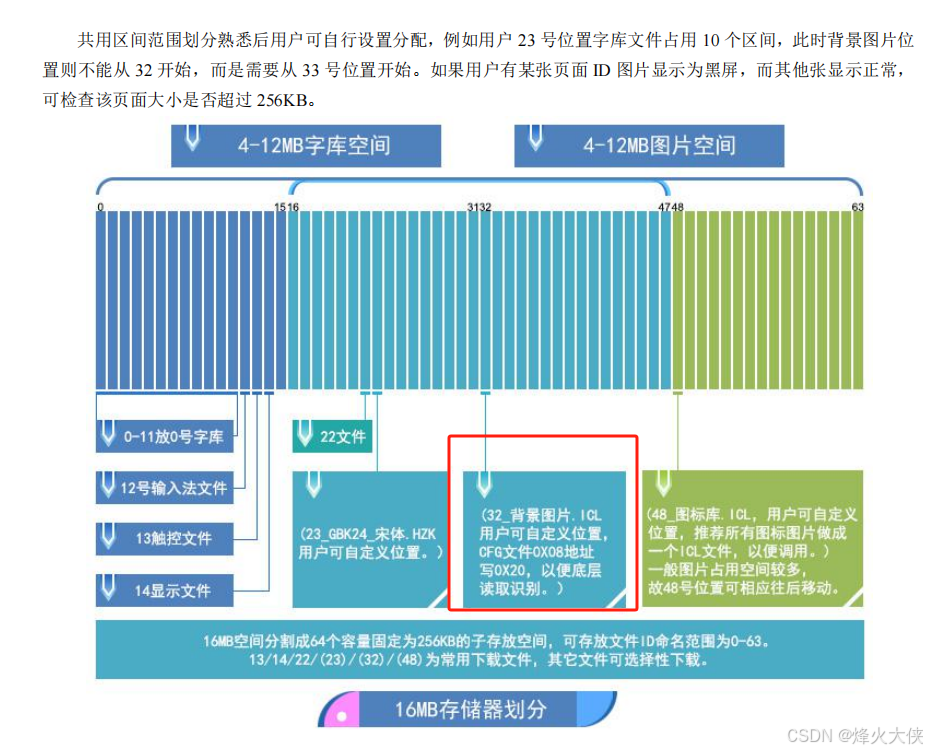
这几天使用迪文屏,感觉把所有的坑都踩了一边,因此做个总结1、迪文屏幕下载时黑屏:插上sd卡出现了黑屏,应该是烧录CFG文件后出现的,找客服要烧录底层的文件即可恢复;2、无背景:只显示ICON图标但不显示背景;原因:CFG文件中ICL的值不对,应改为与背景图生成的ICL文件编号一致;它的编号一般是有讲究的可根据参考文档,比如背景ICL文件编号一般为32,图标ICL文件一般为48;3、迪文软件屏幕不显
最近开发电机控制的项目,我开始使用最新的CW32L012做主控,CW32L012作为混合信号MCU,相比于传统MCU控制,集成度较高,性能当然也更好,加之又是48Pin的芯片,因此我开始做的关于CW32L012主控的电机驱动项目,都是软硬件支持FOC控制的。此外,MCU内置的运放,基本上都有程控放大的功能,CW32L012也不例外,可以在程序中设置运放增益(x2/x4/x8/x16/x32)。而磁
mcu
——mcu
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI硬件创业社区
AI硬件创业社区




 DAMO开发者矩阵
DAMO开发者矩阵