- @weixin_50366509
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
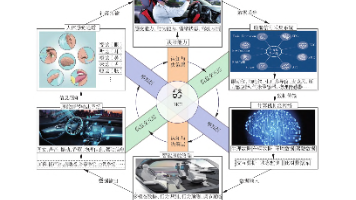
智能座舱多模态交互AI Agent的核心优势在于突破单一交互模态的局限性,实现语音、视觉、触觉、生物识别等多模态的深度融合与协同交互,构建更贴近人类本能、更符合直觉的超自然交互(Natural UI)模式,大幅提升驾驶场景下的交互安全性与便捷性。语音交互是当前最核心的交互模态,依托端侧ASR(自动语音识别)、TTS(语音合成)与多轮对话技术,实现免唤醒指令响应、方言识别与情感化回复等高级功能。端侧
这类芯片主要面向动力、底盘和车身等方向,也就是之前我经常聊到的国产汽车芯片内卷重灾区--MCU。根据IC Insights数据整理,汽车电子MCU市场始终被瑞萨、恩智浦和英飞凌这三家几乎瓜分.当然,这里少了最近势头很猛的旗芯微、云途、智芯等。不过今年随着上述车规MCU御三家的产能恢复,市占率进一步被瓜分,势必对国内MCU造成毁灭性打击。有兴趣的话,大家可以通过今年这几家的财报窥探一二,这个我们后面
主机厂OEM:上汽乘用车、上海蔚来、理想汽车、极氪汽车、现代汽车、上汽大众、上汽通用、上汽大通、上汽通用凯迪拉克、特斯拉(上海)、智己汽车、沃尔沃汽车(亚太)、斯泰兰蒂斯亚太、上海申沃客车、、上汽通用五菱(部分业务相关)智驾供应商:联创汽车电子、天瞳威视、岩山科技、德赛西威、东软睿驰、宏景智驾、福瑞泰克、毫末智行、大陆(中国)、博世(中国)、纵目科技、百度(中国)、英伟达、卓驭(大疆车载)、鸿蒙智
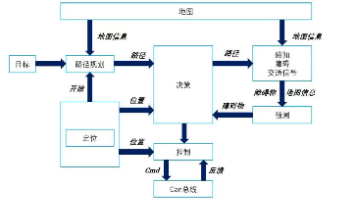
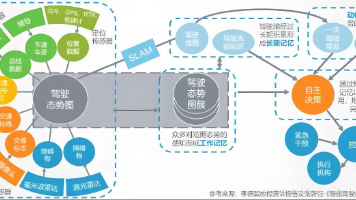
传统的自动驾驶架构多衍生于机器人架构,因此,在机器人领域的感知-定位-规划三大模块及其功能衍生,在很长时间内一直是自动驾驶架构发展的基调。典型的自动驾驶系统通常包含以下几个核心模块:感知模块(Perception)感知模块负责收集和解释车辆周围环境的信息。这包括使用各种传感器,如摄像头、激光雷达(LiDAR)、雷达和超声波传感器来检测和识别周围的物体,例如其他车辆、行人、交通信号和道路标志。感知模
技术重要性:利用生成式AI和世界模型等先进人工智能技术生成高质量的合成数据,可有效缓解数据短缺难题,提升算法模型的可靠性,是自动驾驶模型训练极具前景的发展方向。技术重要性:EMB具备结构简洁、响应快速、控制精准、安全性能显著提升等优势,是适配高级别自动驾驶的关键制动技术,是未来车辆制动系统的重要发展方向。技术发展趋势:2025年,智能电池有望实现内部电势、温度、形变、气压、关键组分的同步自感知、内
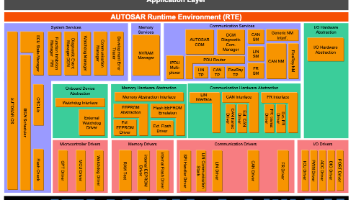
AUTOSAR CP(Classic Platform)是汽车电子控制单元(ECU)的标准化软件架构,专为满足实时性、安全性要求严格的动力总成、底盘和车身控制等场景设计。其核心价值在于通过分层架构实现软硬件解耦:应用层由独立软件组件(SWC)构成,通过虚拟功能总线(VFB)进行通信;运行时环境(RTE)作为中间层管理SWC间交互;基础软件层(BSW)提供硬件抽象和通用服务。该架构采用静态配置模式,
一辆传统燃油车需要大约500到600颗芯片,轻混汽车大约需要1000颗,插电混动和纯电动汽车则需要至少2000颗芯片。这就意味着在智能电动汽车快速发展的过程中,不仅对先进制程芯片需求不断增加,而且对传统芯片需求也会持续增加。MCU就是这样,除了单车搭载的数量在不断增长,域控制器也带来了对高安全、高可靠、高算力MCU的新需求增长。
总体上来看,这个待遇在业界也是特别高的,值得一冲。我是车企学长,希望可以在车企求职这一块能帮到大家。自动驾驶算法: 35K*14(普通硕士)cpp开发:30k*14 (985硕士)嵌入式软开:32K*14(985硕)规控算法 35k*14(211硕士)感知算法 35k*14(985硕士)C++:30K*14(本科211)算法:44k*14(211硕士)开发:38k*14(985硕士)算法工程师:5
大型深度学习模型,如卷积神经网络(CNN)和递归神经网络(RNN),可以用于处理来自摄像头和传感器的图像和点云数据,以识别和跟踪这些对象。总之,大模型为自动驾驶提供了强大的计算和预测能力,有助于实现更安全、更高效的自动驾驶技术。然而,同时也要注意这些模型的可靠性和可解释性,确保其在实际应用中的安全性和有效性。强化学习和其他决策制定算法可以利用大数据和大模型来优化决策过程,确保安全、高效的行驶。自动
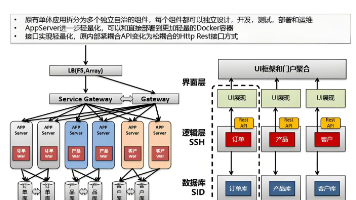
AP平台采用了SOA架构,由一系列的服务组成,应用和其他软件模块可以根据需求调用其中的一个或者多个服务,而服务可以由平台提供,也可以由远程其他部件提供,OEM 可以按照功能设计需求定义所需的服务组合。AP的主要特点是可根据应用需求动态加载,可通过配置文件动态加载配置,并可进行单独更新,相对于 CP,可以满足更强大的算力需求,更安全,兼容性好,可进行敏捷开发。在中央计算平台进行整车功能的划分,将功能