登录社区云,与社区用户共同成长
邀请您加入社区
当800V高压平台、AI大模型和高阶辅助驾驶逐渐成为行业标配,当续航里程从700公里一路卷到1000公里,消费者的感知却越来越弱。汽车产业似乎陷入了同质化的泥沼。然而,真正的巨头早已跳出了“造好一辆车”的单一维度。2026年,全球汽车产业的竞争边界正在被彻底打破。未来的竞争不再是单一产品对产品的较量,而是跨领域、跨主体的生态协同对决。智能汽车、低空经济(飞行汽车)与人形机器人,正成为头部车企的“新
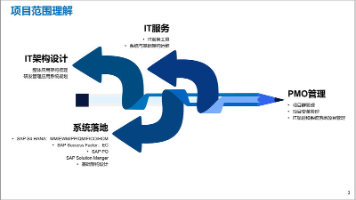
集团管控层面,建立 “集团 - 区域 - 本地” 三级管控模式,统一主数据标准、财务核算体系与权限管理规则,通过主数据管理平台实现物料、客户、供应商等核心数据的全域统一,同时兼顾各国财税法规、数据安全等本地化合规要求。技术架构设计凸显 “弹性、集成、安全” 特性。本规划方案聚焦某大型车企集团全球化运营与数字化转型需求,构建了覆盖研发、业财、人力、技术四大核心领域的全链路信息系统平台,旨在通过统一架
汽车电驱和机器人关节模组,看似属于两个产业,但实际上代表了同一条技术链上的两个阶段。新能源汽车解决的是让机器高效移动,而机器人解决的是让机器完成复杂任务。未来几年,汽车产业人才向机器人产业流动还会持续。但机器人真正需要的,并不是简单复制汽车人才,而是寻找那些能够理解电机、电控、机械结构,同时具备工程量产经验的人。从猎头视角来看,机器人产业下一阶段的人才竞争,本质上是产业经验的竞争。谁拥有更多懂工程
摘要:许可证回收技术通过AI分析用户行为模式,显著提升闲置资源利用率。2026年数据显示,动态回收系统可识别"定时打卡"等使用特征,回收效率比人工提升300%。优化策略包括缩短回收窗口、解绑个人账号、夜间执行等,需平衡效率与体验。行业案例显示,该技术可节省20%采购成本,周转率提升42%。新技术正颠覆传统管理模式,将许可证转化为流动资源,实现35%以上的效率提升。
全球汽车保有量的急剧增长、交通流量的急剧增大,使汽车牌照识别成为交通管理、公共安全的重要环节,准确高效地进行汽车车牌识别,对交通执法、车辆追踪、智能停车等有重大的意义,传统汽车牌照识别方法大部分依靠人工或者基础图像处理技术,识别速度慢、受环境因素影响大,不能满足日益复杂的交通管理需求。 因此,在此背景下,以YOLOv8为依托的汽车牌照识别技术应运而生。该技术利用深度学习算法可以很快且准确的对汽车牌
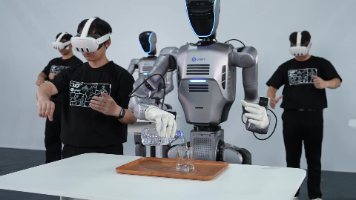
过去两年,人形机器人几乎成了机器人展会上的固定主角。它们能走路、抓取、分拣,也开始进入汽车工厂、仓储和商业服务场景。镜头里的进步很直观,制造企业真正立项时,问题却往往朴素得多:这台设备能不能稳定跑一个班?换产品时要停多久?现场工程师能不能接手?同一套方案复制到第二条线,成本会不会突然失控?这些问题没有人形机器人那么吸睛,却决定了一笔自动化投资能不能落地。人形机器人热度不断上升的同时,协作机器人仍在
本文针对汽车零部件行业过程检验漏检率高的问题,分析了来料、首件、巡检、终检四大环节的漏检表现及成因,对比了轻流、黑湖小工单、新核云等数字化工具在解决漏检问题上的差异化能力。文章指出,中小汽配企业应选择与业务匹配的工具,建议优先考虑移动端全覆盖、具备不良品自动识别功能的零代码平台,以将漏检率从“事后补救”转向“事前预防”。不同规模企业可根据自身需求选择适合的解决方案,年投入从数千到数万元不等。
作为国内领先的数字化转型综合解决方案提供商,金智维将继续发挥领头作用,不断深化技术创新,持续输出可落地、可控、可信的AI数字员工和企业级智能体解决方案,以助力企业拓展智能化边界,构建面向未来的智能工厂,推动人机协同的新质生产力在行业内落地生根。他提到,金智维AI数字员工和企业级智能体解决方案面向全行业,可重构企业业务流程,实现端对端自动化和智能化,推动制造业内外协同一体化。在生产流的销售、渠道、客
第二十一届全国大学生智能汽车竞赛创意组推出"智慧城市Robotaxi挑战赛",聚焦无人驾驶纯视觉技术应用。赛事将于5月24日举办线上启动会,由组委会秘书长卓晴教授解读赛题规则,介绍百度智能云平台能力,并讲解比赛流程和硬件支持。比赛要求参赛队伍使用视觉传感器完成城市道路场景下的自动驾驶任务,考察多模态大模型与边缘计算技术的实战能力。赛事包含系列培训,报名截止6月16日。该竞赛是教育部认可的国家级赛事
在30KG满载高频启停、连续循环码垛的动态工况下,机身惯性抖动难以有效抑制,应用到汽车备料、精密零部件装配等对轨迹、力度、对位精度要求严苛的场景时,极易出现装配偏差、工件损伤、良率下滑等问题,高附加值工艺商业化落地基本空白。而法奥、华沿为代表的传统硬件机型,高度依赖人工示教、固定程序运行,面对物料形变、托盘偏移、车间震动、SKU切换等动态变化,只能停机重新调试,换产效率低、容错率差,完全适配不了现
竞争依然激烈,各家的打法也更清晰了。
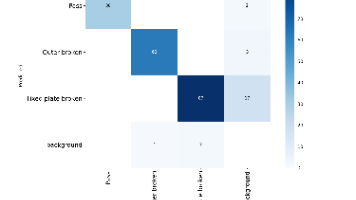
本文基于YOLOv10n轻量化算法实现汽车机油滤芯外观缺陷智能检测系统,包含数据集制作、模型训练与评估全流程。针对三种缺陷类型(合格滤芯、外圈破损、固定板破损),在Windows系统下完成模型训练,取得mAP50达97.5%、单图推理仅4.8ms的优异性能。详细介绍了YOLO格式数据集构建、训练参数配置、Windows环境避坑技巧,并提供精度分析、结果可视化(训练曲线、混淆矩阵)的完整代码。该系统
自动驾驶所需的自研芯片、大模型、感知系统、控制系统与操作系统,同样构成通用人形机器人的核心技术底座,上半场在量产车上验证的技术能力可直接递进至下半场。系列有序进入换代过渡期,在短期业绩和用户长期价值之间,理想汽车选择优先保障新老车主权益,主动停产老款车型,稳健应对产品切换期带来的交付空窗压力和短期营收波动;理想汽车称,面对上游原材料价格上涨带来的行业性成本压力,坚持稳固的价格体系,维护产品价值与用
,从汽车远程诊断、智能化升级、售后诊断、工程诊断、产线诊断、知识图谱与AI大模型应用、数据采集与数据标准化等方面入手,对各细分市场发展特征进行盘点,并对主机厂的智能诊断系统应用、车型搭载情况、专利布局;2025年,提供远程诊断服务的第三方供应商中,艾拉比以39.5%的份额位居第一,德赛西威、科络达分别以14.0%、13.8%的份额位列第二、第三位。2026年,上汽通用五菱远程诊断服务向智能诊断升级
Matlab 基于深度学习的汽车目标检测 Fast rcnn在Matlab 平台上,使用Fast RCNN网络进行汽车目标检测训练和测试。
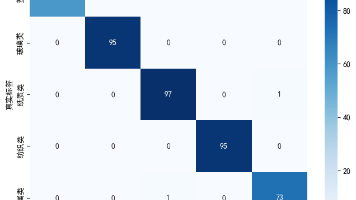
本文针对无人机红外视角下的目标检测任务,构建并评估了一套基于YOLO26架构的深度学习检测系统。研究旨在解决红外图像中目标特征模糊、背景复杂及小目标检测困难等问题。实验使用了包含“汽车”、“忽略区域”、“其他车辆”及“行人”四类目标的红外数据集,共计11,198张图像。训练结果显示,模型在验证集上取得了0.900的优异成绩。其中,“汽车”类检测精度高达0.979,“行人”与“其他车辆”亦表现稳健。
围绕这一环节,中关村科金以全渠道智能客服与多Agent人机协同体系,支持热线语音、热线视频、5G视频、官网、社媒等渠道统一接入,覆盖购车咨询、试驾预约、政策查询、保养维修、售后服务等高频服务场景。销售顾问能力参差、培训周期长、过程管理难、服务质量不稳定,直接影响终端经营结果。未来,中关村科金将继续深耕汽车行业,持续迭代企业智能体、数字员工等核心产品矩阵,不断沉淀汽车垂类AI技术能力与场景化解决方案
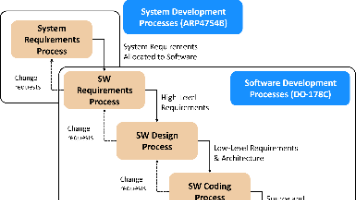
智能汽车领域的深度学习技术(如端到端大模型、强化学习路径规划)面临航空适航标准DO-178C的根本冲突。DO-178C要求代码具备确定性和100%可追溯性,而神经网络的非线性黑盒特性无法满足这一要求。AI算法在eVTOL自主飞行中的应用面临三大挑战:显式逻辑与黑盒概率的对立、双向追溯链断裂、长尾效应风险。解决方案是将AI降级为DALC级感知模块,并设置DALA级确定性安全监视器进行指令验证。最终结
本文基于YOLO26目标检测算法,构建了一套汽车损坏识别检测系统。系统以“Car-Damage”为单一检测类别,旨在对车辆外观损伤(如划痕、凹陷、破裂等)进行自动定位与识别。训练过程采用10,218张标注图像,验证集包含971张图像,测试集为486张图像。实验结果显示,模型在测试集上的mAP50达到92.9%,mAP50-95为84.6%,精确率和召回率分别为88.5%和89.6%,F1分数最高为
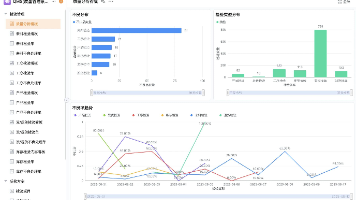
本文介绍了淘宝商城用户购买行为数据分析系统,该系统通过数据挖掘和机器学习技术挖掘用户行为模式,为商家提供决策支持。系统包含数据采集、处理、特征工程、模型构建和可视化五大模块,可实时获取用户行为数据并进行深度分析。研究构建了销售量预测模型,发现商品价格、标签、商家信誉等因素影响用户购买行为。系统支持输入商品信息预测销量,帮助商家优化运营策略。研究显示数据驱动分析能提升运营效率和用户满意度,未来随着A
本文基于YOLOv12n轻量化模型,完成汽车机油滤芯三类缺陷检测模型训练,在仅630张训练样本、CPU训练的条件下,实现整体mAP50=98.8%的超高精度,各类别检测精度均超97%,推理速度快、模型体积小,完全满足工业生产线的实时质检需求,可有效替代人工检测,提升生产效率、降低漏检率。
健康有益HealthAuto智慧健康座舱精准把握行业发展趋势,依托成熟车联网技术、无感传感硬件体系与自研健康大模型核心能力,以车载AI健康管家为核心交互中枢,打通驾乘体征监测、行车疲劳预警、车内环境智能调控、慢病随车管护等全业务链条,为车企提供可快速量产、全流程落地的车载数字健康完整解决方案,助力车企抢占车载健康赛道先机。被动应答层面,用户可通过语音随时问询体征指标含义、慢病养护知识、驾乘不适缓解
面对物料偏差、托盘偏移、车间震动、温度湿度变化等工业原生干扰因素,越疆机器人可自主感知、实时纠偏、动态调节力度与轨迹,彻底解决了传统重载机器人“重载抖动、精密失准、环境适配差”的核心痛点,大幅提升量产良率与设备稳定性。法奥、华沿为代表的传统硬件机型,高度依赖人工示教、定点编程,一旦遇到物料形变、托盘偏移、车间震动、SKU切换,就需要停机重新调试,换产成本高、量产容错低,完全适配不了现代工厂的复合生
汽车之家联合HarmonyOS SDK,深度构建鸿蒙生态体系 一、背景:鸿蒙生态的崛起与汽车之家的新机遇随着华为HarmonyOS操作系统在智能终端领域的全面铺开,鸿蒙生态正在成为国内继Android和iOS之后的第三大移动生态。作为汽车垂直领域的头部平台,汽车之家率先拥抱HarmonyOS,通过深度集成HarmonyOS SDK,实现了从传统App到鸿蒙原生应用的跨越。这不仅是一次技术架构的升级
汽车轮毂进入车削、钻孔或检测工序后,上下料很快就会变成一项体力活。毛坯表面不便抓握,机床门口空间紧,卡盘又在设备内部;刚加工完的工件还可能带着切削液和金属屑。取料、装夹、等待、下料,一班里要反复做很多次。30kg 级协作机器人常被列入轮毂和重型汽车零部件项目的候选范围,越疆 CR 30H 官方列出的汽车制造应用就包括汽车轮毂搬运。轮毂重量低于 30kg,机器人却未必还有充足余量。夹爪、转接板、气路
基于深度学习的手势图像识别处理系统完整源码+数据集+项目报告+项目PPT全套(无调试视频)112(设计源文件+万字报告+讲解)(支持资料、图片参考_降重降ai)标价即售价,需要可以直接拍,不答疑,电子资料售出后不退,请知悉。包含MATLAB程序和11页报告,报告所需的所有图片。3. 对Arnold置乱加密的图像进行性能指标测试。用Python语言实现,深度学习和图像处理技术,1.实现Arnold置
汽车智能诊断
汽车
——汽车
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵

 深开鸿 技术专区
深开鸿 技术专区

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



 EazyDevelop社区
EazyDevelop社区

 AI编程社区
AI编程社区










 人工智能6S服务平台
人工智能6S服务平台

 AI Agent技术社区
AI Agent技术社区

