登录社区云,与社区用户共同成长
邀请您加入社区
和按键不一样:按键只有「按下 / 松开」两种状态(数字开关);,用来描述摇杆、线性扳机的倾斜程度。你的手柄:一共plaintext。
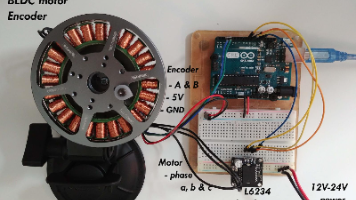
摘要: Arduino BLDC机器人采用自适应模糊控制与卡尔曼滤波融合技术,实现高鲁棒性运动控制。模糊逻辑处理非线性及不确定性,动态调整PID参数;卡尔曼滤波融合多传感器数据,消除噪声并精准估计状态。系统适用于复杂地形机器人、工业AGV、协作机械臂及无人机等场景,需注意算力优化(采用32位MCU)、参数整定、传感器抗干扰及安全冗余设计。示例代码展示了恒力控制中卡尔曼滤波与模糊PID的协同实现,通
现代摄像头云台,术语源自闭路监控(CCTV)行业。早期重型室外摄像机需要承载支架,实现水平、俯仰转动,行业统一命名云台。Pan-Tilt Unit,简称 PTUPan:水平左右旋转(偏航)Tilt:上下俯仰(俯仰)二自由度云台 = Pan+Tilt 机构,也就是你机器人上使用的 PT 云台。古代 “云台” 是登高瞭望的高台;近代安防行业借用这个词汇,把能够承载摄像机、实现水平 + 俯仰转动的机械支
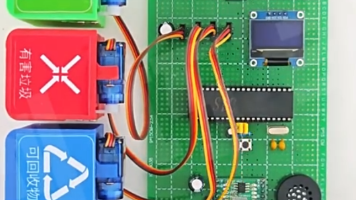
本课题设计一款基于 STM32 或 51 单片机的语音交互智能垃圾分类桶控制系统。系统以单片机为主控单元,搭载 SU-03T 离线语音识别模块实现语音指令识别与垃圾分类判定,利用 9g 舵机驱动四类垃圾桶桶盖自动开合;采用 HC-SR04 超声波传感器实现垃圾容量检测,通过 0.96 寸 OLED 显示屏实时展示设备运行状态。系统支持语音控制、实体按键手动控制两种操作模式,借助 ECB01 蓝牙模
本文介绍了嵌入式系统中的中断处理机制与FreeRTOS任务通知应用。主要内容包括:1)中断分类(外部/外设中断)及优先级设置;2)中断触发方式与处理原则(保持简短、避免阻塞、保护共享数据);3)任务通知机制实现中断与任务间通信(xTaskNotifyFromISR/xTaskNotifyWait);4)提供GPIO中断处理示例代码,包含消抖设计、任务通知传递及主任务处理逻辑。强调中断服务程序应高效
摘要: 本文介绍了一种基于Arduino的BLDC电机驱动、视觉SLAM与IMU融合的自主跟随机器人系统。该系统通过视觉传感器(如OpenMV)进行目标识别与定位,结合IMU提供的高频姿态数据实现航向补偿,确保在复杂环境中稳定跟随。核心特点包括:多源传感器融合的抗干扰感知、视觉丢失时的IMU航迹推测、分层式双闭环运动控制,以及BLDC电机的高动态响应。典型应用场景涵盖智能仓储、服务机器人、安防巡检
行空板K10是一款专为物联网和AI教育设计的国产开发板,集成了2.8寸彩屏、摄像头、麦克风、扬声器及多种传感器,支持离线图像识别、语音交互等功能。配合掌控板(带陀螺仪和无线通信)作为遥控器,可通过2.4G射频或BLE广播实现智能小车控制。实验展示了六通道简版遥控方案,利用姿态识别发送指令驱动差速小车,代码中整合了按键触发、无线通信和传感器数据处理功能,适用于STEAM教育中的物联网和机器人教学项目
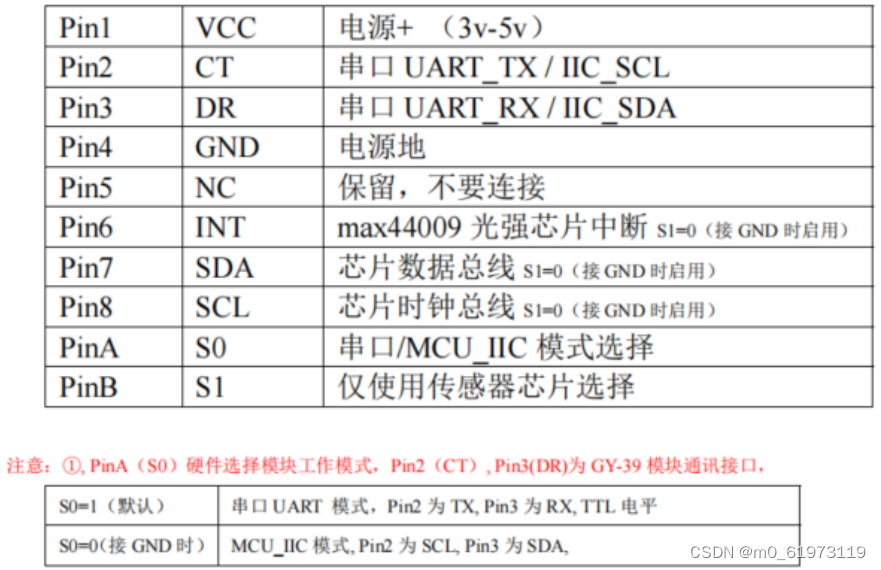
是一款模块。工作电压 3-5v,功耗小,安装方便。其工作原理是,MCU 收集各种传感器数据,统一处理,直接输出计算后的结果。GY39有两种方式读取数据,即串口 UART或者 IIC。
本作品以AIR32F103CCT6单片机为控制核心,设计并制作了智能家居系统。系统由单片机控制电路、电源电路、复位电路等组成。智能家居系统包括蓝牙模块、温湿度模块、语音合成模块、OLED显示屏,通过蓝牙模块可以用手机控制智能家居的开关灯,语音合成模块并且可以播报智能家居实时的温湿度,系统稳定性和安全性高,功能丰富,人机交互良好。
水处理行业使用的89BSD-018BA-A压力传感器是由89BSD-006BA-A压力传感器作为测量元件,把与液位深度成正比的液体静压力准确测量出来,并经过信号调理电路转换成标准(电流或电压)信号输出,建立起输出信号与液体深度的线性对应关系,实现对液体深度的测量。产品精度高、体积小,直接投入液体中,即可测量出89BSD-030BA-B压力传感器末端到液面的液体高度,使用方便。89BSD-030BS
本文设计了一种基于STM32F103RCT6单片机的水塔水位监测系统,通过超声波传感器实时采集水位数据,经处理后显示在OLED屏上,并在水位异常时触发声光报警。系统硬件包含控制、检测、显示和报警四大模块,软件采用模块化编程实现数据采集、处理与报警功能。经实际测试,系统测量误差小于1cm,报警响应迅速,可稳定运行24小时以上,满足水塔水位监测需求。
本文介绍了一种基于STC89C51/52单片机的WIFI智能家居系统设计方案。系统集成了ESP8266无线模块、DHT11温湿度传感器、LCD1602显示模块、继电器控制电路、AT24C02存储芯片和声光报警模块。通过手机端发送特定指令实现远程控制家电、获取环境数据等功能,并支持温湿度阈值报警。系统采用模块化设计,硬件电路稳定可靠,软件程序采用C语言编写,具有良好的扩展性和实用性。测试表明,该系统
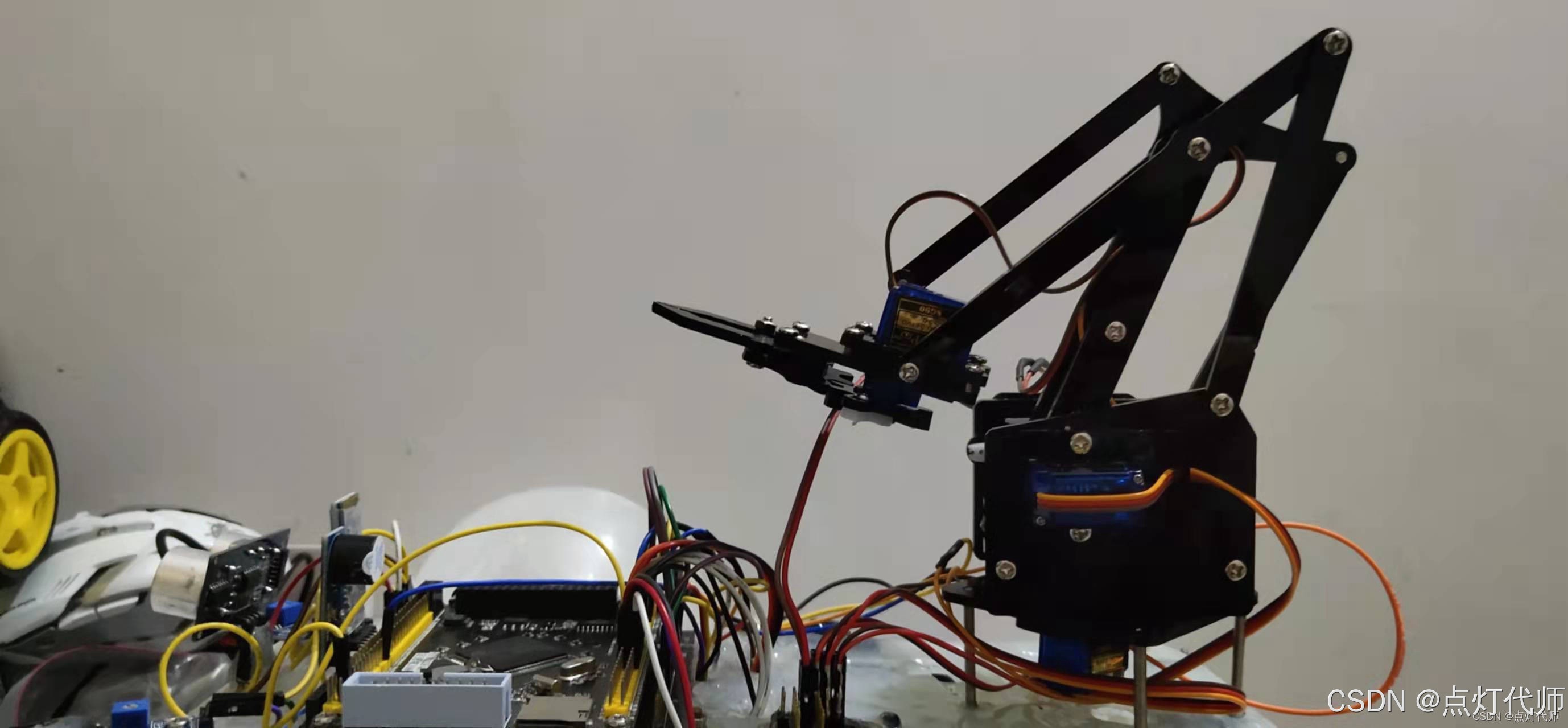
Arduino BLDC机械臂控制摘要 本文介绍了基于Arduino的无刷直流电机(BLDC)多轴机械臂控制系统,包含三个核心代码示例:基础多轴控制、速度控制实现和复杂动作序列。系统采用SimpleFOC库实现精确电机控制,支持串口动态调速功能。关键特性包括: 多轴协同控制(3-7轴) 可编程速度调节(15-30级) 平滑运动轨迹算法 实时串口指令交互 应用场景覆盖工业自动化、医疗辅助和教育研究领
MY18E20 、MY1820、 MY18B20Z、 MY18B20L是数字模拟混合信号温度传感芯片,最高测温精度为-10°C 到+85°C 范围±0.5℃,用户无需进行校准。温度芯片感温原理基于 CMOS 半导体 PN 节温度与带隙电压的特性关系,经过小信号放大、模数转换、数字校准补偿后,数字总线输出,具有精度高、一致性好、功耗低、可编程配置灵活、寿命长等优点。温度芯片内置 14bit ADC,
压力传感器是一种常用的传感器,可用于测量气体或液体的压力,并将其转化为电信号输出。在本文中,我将为您介绍如何使用STM32微控制器来读取和处理压力传感器的数据。首先,让我们来了解一下STM32的GPIO(通用输入输出)引脚。在本例中,我们将使用一个ADC(模数转换器)通道,该通道将允许我们将模拟输入信号转换为数字值。函数读取ADC的值,并将其转换为压力值。这里根据您的传感器进行相应的转换。然后,我
对于蓝桥杯嵌入式开发板的简单介绍
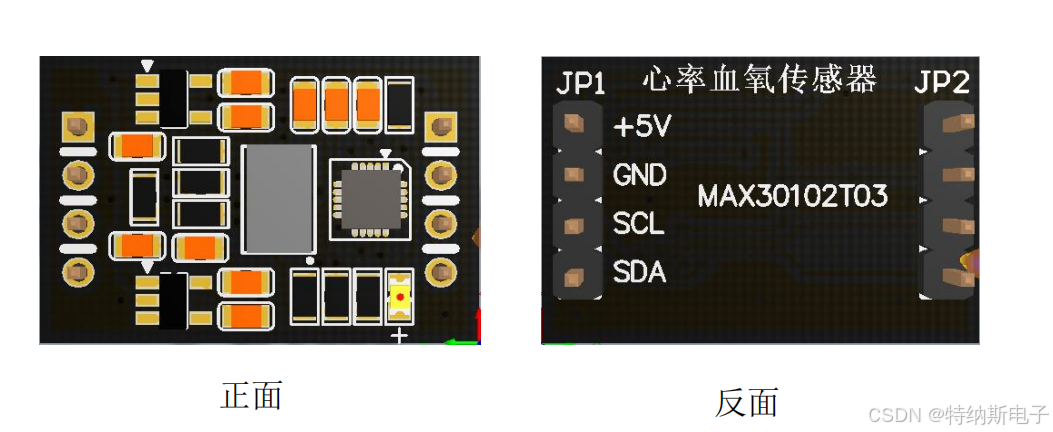
血氧心率测量模块集成了电源转换芯片(5V 转 3.3V/1.28V)、单片机(HC32F003)、血氧传感器(MAX30102)以及相关外围元件;其中模块上的单片机通过读取血氧传感器中的原始 ADC 数值,经过FIR 滤波及心率、血氧处理算法计算出经过量化的心率和血氧值;用户只需要通过简单的I2C或者UART接口即可读取到该模块中的心率、血氧数值,不用再去关心数据滤波及算法等问题,能够使自己的应用
在工程目录/Core/Inc下创建aht20.h头文件//函数声明#endif在工程目录/Core/src下创建aht20.c文件0x70//{0x38,0}if((readBuffer & 0x08) == 0x00) //判断校验状态字//发送触发测量命令if(readBuffer[0] & 0x80 == 0x00)//判断忙状态bit[7]是否为0;//位拼接,提取湿度度数据。
材料:(1)stm32f407zgt6最小系统开发板(2)机械臂(3)JDY-31蓝牙模块一、组装(1)蓝牙接线:VCC接stm32开发板的3.3v~5v,GND接stm32开发板的GND,TXD接stm32开发板的PA10引脚,RXD接stm32开发板的PA9引脚。(2)机械臂连线:舵机红色连接单片机vcc,舵机灰色连接单片机gnd,黄色连接单片机IO口。二、主要程序1、STM32CUBEMX配
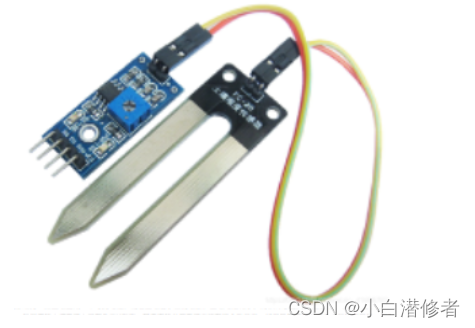
基于STM32的土壤湿度传感器的使用
通过深入理解 SNScanNGForm 的事件驱动设计,我们可以看到它如何利用 Windows Forms 的事件循环和回调机制实现用户交互和业务逻辑的分离。结合回调机制的讨论,本文将深入解析事件驱动设计的原理、在 SNScanNGForm 中的体现、与回调机制的关系,以及更广泛的应用场景和设计注意事项。2. 事件驱动设计在 SNScanNGForm 中的体现在 SNScanNGForm 代码中,
DS18B20——温度传感器,单片机可以通过 1-Wire 和 DS18B20 进行通 信,最终将温度读出。1-Wire 总线的硬件接口很简单,只需要把 18B20 的数据引脚和单片 机的一个 IO 口接上就可以通信。最高12为的温度存储值,补码形式存储。2字节,LSB低字节,MSB高字节,-55~125
单片机
——单片机
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵


 AI Agent技术社区
AI Agent技术社区
 2048 AI社区
2048 AI社区


 深开鸿 技术专区
深开鸿 技术专区