登录社区云,与社区用户共同成长
邀请您加入社区
模型基于KDA混合线性注意力机制(Kimi Delta Attention)和注意力残差(Attention Residuals)技术构建,原生支持视觉理解,并拥有100万token上下文窗口,在保持顶尖能力的同时,将KV Cache压缩75%,长上下文解码速度最高提升6.3倍,大幅优化了训练与推理的效率及成本。例如,真武M890对Kimi K3模型架构的核心算子进行优化,显著提升推理的算力和带宽
他们习惯了做百万级的精密产品,不会做十万级的民用产品了,他们习惯了三五年磨一代精品,已经适应不了半年一更的快速迭代了。几个干了半辈子工业机器人的日本老技术人员,围着一台中企的人形机器人大卸八块,从每一颗螺丝的咬合手感,到每一束线束的走线逻辑挨个抠细节,架势跟拆竞品找破绽没两样。2026年上半年,宇树、智元、优必选、小鹏,中国人形机器人厂商密集出货,海外订单排到了年底,半年一迭代已是行业标配。能卖出
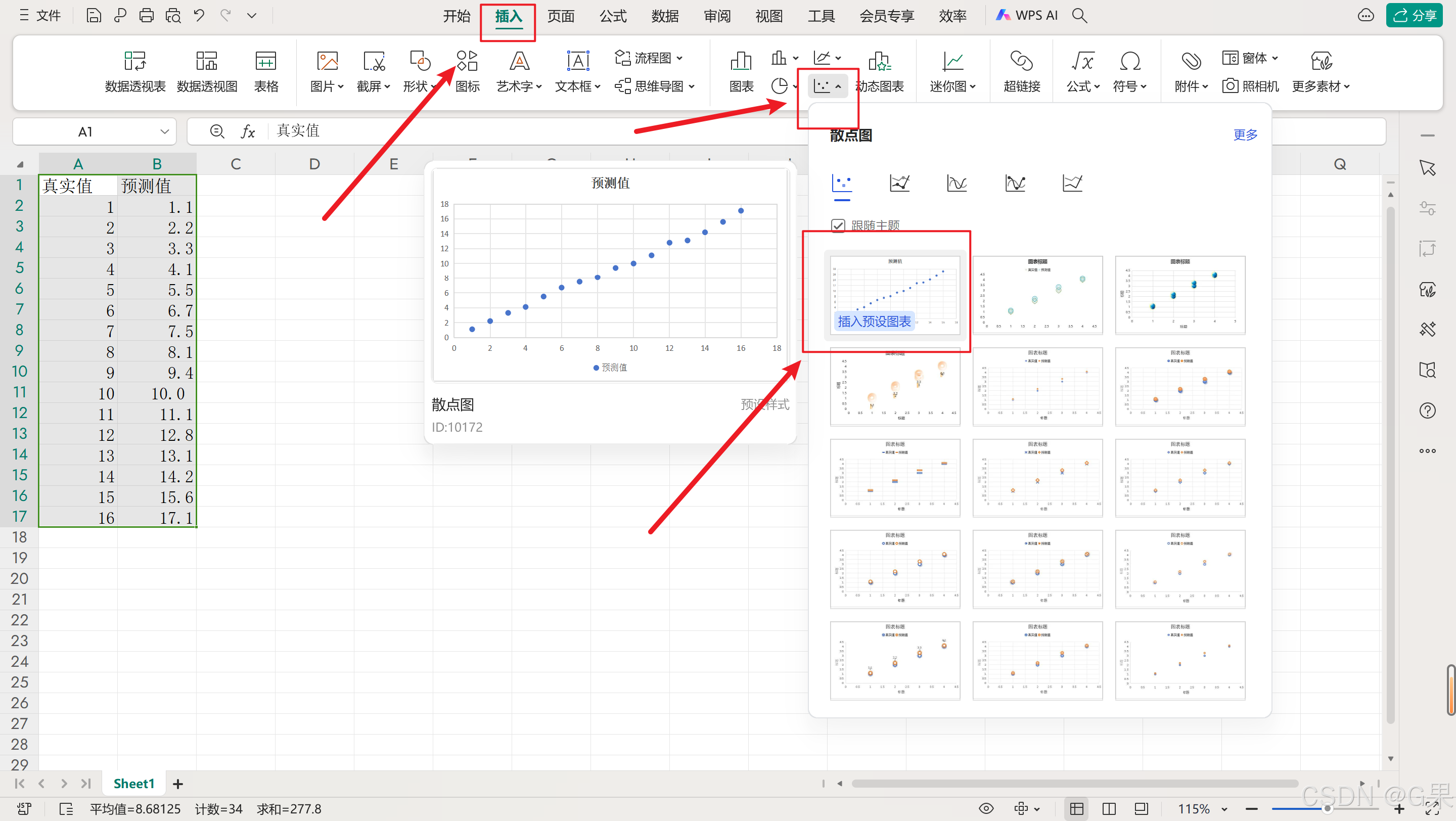
维度柱状图(第120篇)饼图/环形图(第121篇)雷达图/散点图(本篇)坐标系直角坐标系极坐标系(扇区)雷达:极坐标;散点:直角坐标核心图形矩形柱体圆弧扇区雷达:闭合多边形;散点:圆点数学难点高度映射角度分配、极坐标转换雷达:多边形顶点计算;散点:回归线拟合动画类型高度增长角度展开+半径扩展雷达:多边形生长;散点:中心扩散交互检测X轴区间极坐标(距离+角度)雷达:点到线段距离;散点:圆点碰撞适用数
本文深入探讨最小二乘法在数据分析中的应用,从Excel趋势线的基础操作到机器学习中的高级实践。通过对比不同场景下的实战案例,揭示最小二乘法的优势与局限,并提供Python中的工业级解决方案,帮助读者避免常见陷阱,提升数据分析效率与准确性。
机器学习与模式识别 第七章 线性回归3 模拟卷及答案
最小二乘法 质量-阻尼-刚度动力学方程
投影公式”在不同领域(几何、线性代数、物理等)有不同的含义。
本文围绕机械臂逆运动学(IK)的数值求解方法展开,系统讲解了从正运动学到雅可比线性化的完整推导过程。文章首先说明了解析法在通用机械臂中的局限性,然后引入数值法的核心思想——利用雅可比矩阵与一阶泰勒展开建立末端位姿与关节变量之间的线性关系。接着,结合李代数形式统一描述位置与姿态误差,推导出最小二乘与阻尼最小二乘(DLS)迭代求解方法。该方法具有较强的通用性和稳定性,适用于复杂结构、冗余机构及仿真系统
7月初,在AI这波掉队后,Meta出来掀桌子,先是宣布对外出租闲置AI算力,市场的第一反应是“算力买多了”,Meta一直是算力的大买家,现在要将GPU拿出来出租,是不是说算力过剩了?到7月17日收盘,216港元,市值754亿港元,缩水超80%。逻辑链条大概是这样的:Kimi K3太强了,2.8万亿参数,全球首个开源3万亿级别模型,在Arena.ai编程排名上冲到了全球第,投资者担心模型这么厉害会导
过去七年间,特斯拉每隔一段时间就会释放新产品的消息,比如开售Cybertruck皮卡和Semi重卡,揭开了Cybecab和Robovan的面纱,预告了新一代Roadster跑车,入门车型Model 2也一度若隐若现。但与同一商场内的 鸿蒙智行、小米、理想、 智己等品牌的新车相比,Model Y在外观、内饰、空间、配置、动力、电池等方面并不占优,甚至多数指标处于劣势。马斯克擅长造车,更擅长讲故事。如
在编写文章标题时,Java的严谨性可以帮助确保标题的结构和逻辑性,而Python的灵活性则可以为标题注入创意和多样性。将Java的严谨性与Python的灵活性相结合,可以为文章标题的编写带来新的思路和方法。通过Java编写Python文章标题,不仅结合了两种语言的优势,还为内容创作提供了新的思路。Java的严谨性和Python的灵活性相辅相成,使得生成的标题既符合逻辑又充满创意。通过Java编写P
本文探讨了C++智能航空调度系统的自动化测试策略与实践经验。系统面临多机场异构接口、实时性要求、复杂运行场景等挑战,测试需确保稳定性、安全性和效率。采用分层测试策略,包括单元、接口、集成、端到端及性能测试,结合GoogleTest等工具验证功能与性能。通过数据驱动测试、CI/CD集成和容错验证,实现90%覆盖率,缺陷发现率提升35%,延迟降低25%,准点率提升30%。研究证明分层自动化测试能有效保
此次手术使得此前Neuralink一直遵循的“微创化+自动化”技术路线可行性得到验证,将手术时间从传统的8小时缩至1小时内,并大幅降低成本;同时,此次手术还加速了半侵入式和侵入式的融合,为全球脑机接口行业明确了微创化为核心的演进路径,将带动柔性电极、术中影像、手术机器人等技术的协同突破和应用,并实现对侵入式脑机接口的安全边界与工程实现方案的重新评估和设计。保留硬脑膜而不是切除它,是该方向上巨大的一
本文详细介绍了最小二乘法在Python 3.12中的实现,从数学公式推导到仅需10行代码的直线拟合。通过核心公式解析和NumPy向量化运算,展示了如何高效实现线性回归,并验证了代码的正确性。文章还探讨了性能优化、边界处理及实际应用案例,为数据分析与机器学习提供了实用指导。
本文详细介绍了最小二乘法在Python 3.7中的实现,从数学公式推导到波士顿房价预测实战。通过一元线性回归模型,展示了如何最小化预测误差平方和,并实现了R²达0.485的预测效果。文章还对比了自定义实现与Scikit-learn库的结果,验证了模型的正确性。
本文深入比较了最小二乘法与梯度下降在线性回归中的3大核心差异,包括计算效率、收敛特性和适用场景,并提供了两种方法的Python实现对比。最小二乘法通过解析解直接求解参数,适合特征数少的场景;而梯度下降通过迭代优化,更适合高维大数据。文章还展示了两种方法在波士顿房价数据集上的实际效果对比。
在计算机视觉领域,图像处理是基础且核心的技术,而边缘检测和特征提取是其中的关键步骤。其原理在于通过分析像素间的梯度变化来识别图像中的轮廓信息,例如经典的Canny算子。这项技术的价值在于为后续的形状识别与几何分析提供了精确的数据基础,广泛应用于工业检测、医学影像和自动驾驶等场景。本文聚焦于椭圆检测这一具体任务,深入探讨了如何在不依赖OpenCV等成熟库的情况下,从图像预处理、边缘提取开始,通过弧段
本文通过Python实战对比最小二乘法和卡尔曼滤波在GPS定位中的效果,详细展示了两种算法的实现过程与性能差异。使用NumPy和filterpy库,模拟GPS数据并可视化结果,揭示卡尔曼滤波在噪声抑制和动态跟踪上的优势,为信号处理领域提供实用参考。
本文通过房价预测和用户流失分析两个实际案例,详细展示了如何使用Excel和Python实现多元线性回归建模。从数据准备到模型解读,深入浅出地解释了最小二乘法在业务决策中的应用价值,帮助读者掌握这一机器学习核心技术。
本文详细介绍了如何使用Python和OpenCV实现专业级相机色彩校正,重点讲解了最小二乘法在计算色彩校正矩阵(CCM)中的应用。通过24色卡拍摄、数据处理、带约束的最小二乘法实现等步骤,帮助读者掌握从理论到实践的完整流程,解决实际工程中的色彩偏差问题。
在三维数据处理与计算机视觉领域,模型拟合是一项基础且关键的技术,其核心目标是从离散的观测数据中恢复出潜在的几何形状参数。从原理上讲,拟合通常基于最小二乘法,通过最小化观测值与模型预测值之间的误差平方和来求解最优参数。在三维几何拟合中,球体拟合因其在工业检测、逆向工程和机器人标定中的广泛应用而成为高频需求。代数拟合通过线性化技巧将非线性问题转化为线性最小二乘求解,计算高效但可能对噪声敏感;几何拟合则
本文对比了最小二乘法与卡尔曼滤波在动态系统状态估计中的表现,通过Python+NumPy实现简易卡尔曼滤波器,并以GPS定位为例展示其优势。卡尔曼滤波通过递归更新和误差传播,显著提升估计精度,特别适合处理时序数据。文章包含完整代码实现和性能对比,帮助读者掌握这一强大工具。
本文通过Python的NumPy和Matplotlib,直观展示了最小二乘法的几何意义,从向量投影到代码实践。通过三维可视化和实际案例,帮助读者理解最小二乘法在数据科学和机器学习中的应用,避免死记硬背公式,提升学习效率。
本文通过Python和NumPy实战演示了最小二乘法和卡尔曼滤波在GPS噪声处理中的应用。从数据生成到算法实现,详细对比了两种方法的优劣,并提供了混合策略和进阶调试技巧,帮助开发者在实际项目中做出最优算法选择。
本文详细介绍了如何使用Python和NumPy实现相机色彩校正矩阵(CCM)的计算,通过最小二乘法求解带约束的优化问题,提升数字图像处理的色彩保真度。文章包含环境配置、数据准备、算法实现及结果验证,适合开发者深入理解CCM计算原理并应用于实际工程。
本文详细介绍了如何利用Python和最小二乘法自动计算相机CCM矩阵,实现色彩校正的自动化流程。通过24色卡数据采集和约束最小二乘法优化,该方法显著提升了色彩还原的准确性和效率,解决了传统手动调色和商业软件的高成本问题。适用于实验室和产线环境,为图像算法工程师提供了一套高效、可复用的技术方案。
本文介绍如何使用Python和NumPy构建一个自动化色彩校正矩阵(CCM)计算工具,通过最小二乘法实现从色卡数据到优化矩阵的一键生成。文章详细讲解了核心原理、工程化实现流程及高级功能扩展,帮助开发者快速掌握数字图像处理中的色彩校正技术,大幅提升工作效率。
本文详细介绍了如何使用Python和NumPy实现相机色彩校正矩阵(CCM)的计算,通过最小二乘法优化算法解决图像色彩偏差问题。文章包含完整的代码示例和色差评估方法,帮助开发者快速掌握专业级色彩校正技术,提升图像处理质量。
线性回归是机器学习中最基础的监督学习算法之一,其核心在于通过最小二乘法求解最优参数,使预测误差的平方和最小。该方法基于线性模型假设,利用数学推导(如偏导优化)得出权重w与偏置b的闭式解,具备计算高效、可解释性强的技术价值。广泛应用于房价预测、销售趋势分析、实验数据拟合等场景。本文聚焦线性回归与最小二乘法的结合,详解公式推导逻辑,并通过NumPy手写实现回归参数计算,帮助读者夯实统计建模基础,掌握从
       机器学习金典算法系列旨在归纳总结常用经典机器学习算法,其中
从概率视角分析:MLE(极大似然估计)与LSE(最小二乘估计)是等价的。
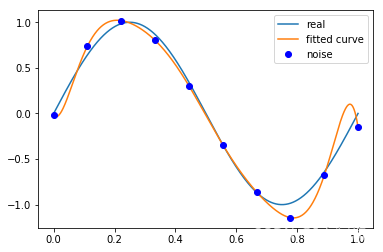
高斯于1823年在误差e1 ,…回归问题中,损失函数是平方损失,正则化可以是参数向量的L2范数,也可以是L1范数。此时L2范数(残差平方和)最小时,h(x) 和 y 相似度最高,更拟合。结果显示过拟合, 引入正则化项(regularizer),降低过拟合。: numpy.poly1d([1,2,3])生成。当M=9时,多项式曲线通过了每个数据点,但是造成了过拟合。, 加上一个正太分布的噪音干扰,用
连杆机器人FK/IK基础(1)
对于传感器采集的数据,一般都需要一次误差标定,因为传感器测量会有误差噪声,就是对传感器采集的值进行直线拟合,也就是利用最小二乘法计算一条直线使得这些点到直线的距离最小(近似解)。也就是求解直线方程y = kx + b的k和b两个参数。
最小二乘法
——最小二乘法
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区

 DAMO开发者矩阵
DAMO开发者矩阵


 HarmonyOS开发者社区
HarmonyOS开发者社区


 AI编程社区
AI编程社区



 全球具身智能开发者社区
全球具身智能开发者社区

 人工智能6S服务平台
人工智能6S服务平台

 AI Agent技术社区
AI Agent技术社区