登录社区云,与社区用户共同成长
邀请您加入社区
当您翻开此书,您正踏入一场数据与智慧的修行。机器学习,并非冰冷的符码,而是机器模拟人类洞察世界的法门。本书将带您,以Python为舟,泛游于算法之海。我们不只传授“术”,更探求其后的“道”——从数据的生灭流转中观照规律,于模型的迭代演进里体悟得失。愿您合上书卷时,收获的不仅是驾驭数据的技能,更有一双洞悉复杂、化繁为简的“智慧之眼”。现在,让我们一同启程。
亲爱的读者,欢迎您翻开这本书。我们即将探索的,是深度学习的宇宙——一个由数据、算法与算力构筑的奇妙世界。它既是严谨的科学,也是创造的艺术,更是一条通往未来智慧的修行之路。本书将带您从最基础的数学原理出发,亲手搭建神经网络,驾驭Transformer等前沿模型,最终将智慧转化为现实世界的价值。请放下畏惧,保持好奇。这不仅是一次知识的学习,更是一场思维的远行。来,随我一起,开启这趟非凡的旅程吧。
本文介绍了DeepSeek 某个模型的矩阵正则化重构版本,主要包括配置池(ConfigPool)和基础机床库(Pure Machines)两部分。配置池定义了模型的关键参数,如隐藏层大小、注意力头数等,并进行了严格的参数校验。基础机床库实现了RMS归一化、RoPE旋转位置编码等核心组件,其中RoPE计算采用了奇偶配对旋转的正确实现方式。代码展示了如何预计算频率表并应用于输入张量,通过复数旋转实现位
我最近在解决一个问题, 想计算两个小图片的相似性.为了简化计算我打算把rgb三种颜色的分离数值合并成一个数值.两种颜色越是相近, 这两个数值的差越小例如颜色 #000001和颜色#000002的差是1,数值越小说明两个颜色越相近. 如果事情是这么简单的话就优美了… 但是现实情况却并非如你所料的那么美好.例如颜色#ffffff是白色 和颜色 #feffff, 人眼几乎是区分不出来的.可以视为相等,
张量投票:(注:下文中的“点”指的是,用传感器模型获得的环境的离散化表示,如用激光雷达获取的点云,或者是把双目相机的图像转换得到的点云等)Stumm等人提出张量投票是一种获得密集几何信息的方法。基本上,张量投票通过点投票提取几何基元(例如平面、直线和球体)和相关的显著性(这里理解为:是某种几何基元的可能性大小)。这个过程通常分为两步:首先,假设点是球体,它们之间进行投票,以获得局部结构的第一个想法
好代码从不靠行数,而是用最少规则实现最大功能——这条公理 I2=−N 如是,《旋生万物》也如是。欢迎在评论区用你熟悉的「代码逻辑」拆解这条公理,看看Agent能否读懂你的几何先验 😏© 张智明. 螺旋生成论(Spiral Genesis Theory)系列专著 · Zenodo 2026 · CC BY 4.0 / CC BY-NC-ND 4.0 | ORCID: https://orcid.o
/!创建一个可选择的三轴坐标系//!该三轴坐标系包括一个原点,三个轴线和三个标签。//!标签的默认文本为 “X”, “Y”, “Z”。//!可以更改原点和任意轴线的颜色,箭头和标签的颜色也可以改变。//!可视化呈现可能显示为两种模式:着色模式和线框模式(默认为线框模式)。//!有四种选择模式://!- AIS_TrihedronSelectionMode_EntireObject 完整选择三轴坐标
四元数 q 由一个实部 w 和一个三维向量部分 v 组成:其基本规则蕴含了非交换性这里的乘法是叉积。因为 p 在公式中被左右各“操作”了一次,旋转角会叠加。为了得到总角度 θ,我们构造 q 时必须使用半角这不仅解决了代数封闭性,还引出了四元数的双倍覆盖(Double Cover)特性:q 和 −q 在三明治变换下对 p的作用是完全一样的:在三明治变换中,如果我们把 q 替换为 −q,所以,从代数结
文章摘要 本文从传统内核开发视角,通过功能行为、状态空间和函数架构三个维度,对重构后的软中断实现与Linux原生版本进行严格对齐校验。在功能行为上,所有API接口、主执行流程和边界场景处理均保持100%一致;状态空间方面,核心状态变量和变换规则完全等价,仅新增可选的压力监控超集;函数架构上虽代码组织方式不同,但调用关系、并发模型和内存语义与原版完全一致。最终证明重构后的388行代码在运行时行为、性
经过多轮系统性的消解,总计超过1000个数学猜想和跨学科问题在DAVG框架下获得了严格证明或结构性解释。这些猜想覆盖了数学的几乎所有主要分支,以及物理、生物、经济、计算机科学、人工智能、语言学、气候科学等广泛交叉领域。
本文基于张智明《旋生万物》(Zenodo, CC BY 4.0, ORCID: https://orcid.org/0009-0003-7777-7694)提出的公理 I2=−N(N>0),构建了一套适用于Physical AI World Model的最小几何因果先验,并给出可直接注入Cursor/Claude Code的实战约束。
【摘要】CsGrafeq是一款基于C#开发的开源几何画板,采用AOT技术发布,无需安装.NET Core运行时。该项目的诞生源于国内几何画板性能差、界面老旧,而国外软件需付费或依赖网络的问题。目前版本暂不支持隐函数绘制(相关功能在OldVersion文件夹中单独实现),但未来会整合到主项目中。开源地址:https://github.com/jyswjjgdwtdtj/CsGrafeq
虽然 SolidWorks 的原生 API 是基于 COM(Component Object Model)技术,主要支持 VBA(Visual Basic for Applications)、库,我们可以方便地调用 COM 接口,从而实现对 SolidWorks 的自动化控制和二次开发。前几天有粉丝留言问我:SolidWorks支持用python开发吗?确保已安装 SolidWorks(2012
这是所有操作的起点。您可以选择连接到已打开的 SolidWorks,或者启动一个新的会话。
连接到 SolidWorks 后,您可以操作模型、图纸、装配体等。以下是一些常见任务的示例。
SolidWorks API 在不同版本间会有变化,请根据你的 SolidWorks 版本查阅对应文档。:某些 API 功能需要相应的 SolidWorks 许可证(如 Premium 功能)。:COM 调用可能因各种原因失败(如用户取消操作、文件锁定等),必须有健壮的错误处理。:Python 与 COM 之间的数据类型需要正确转换,特别是数组和特殊对象。:批量处理大量文件时,注意管理 Solid
光栅化和光线追踪 一个用到了Z-buffer 存出深浅依次叠加,一个用到了光线相交找最近。 光栅化和光线追踪的比较
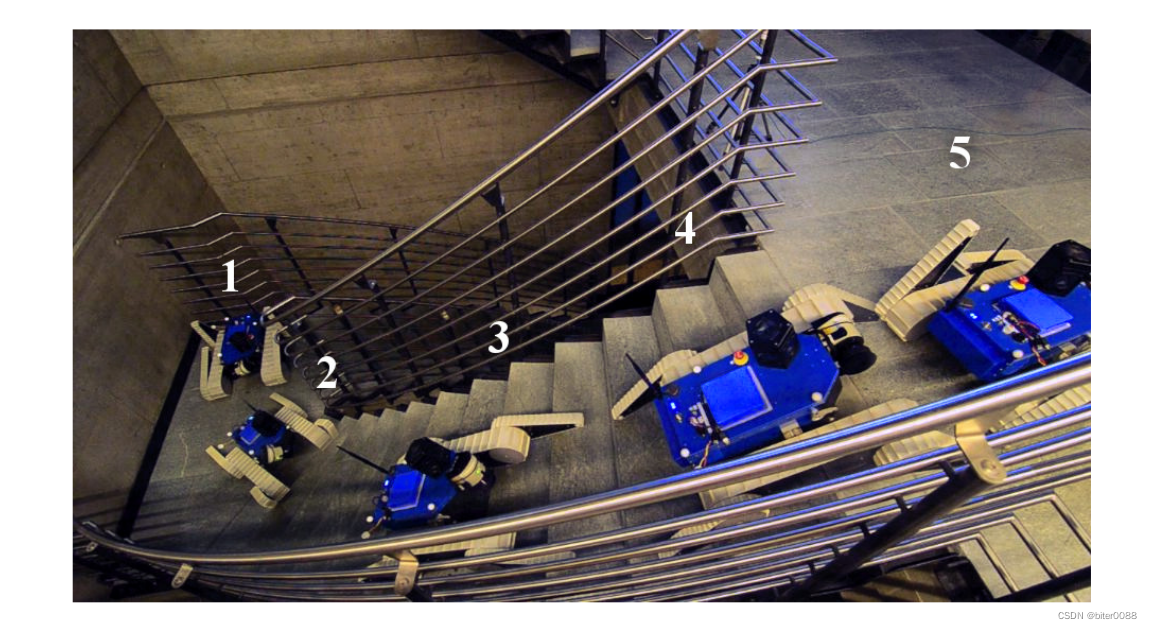
合肥工业大学2021专业选修课机器人技术作业二
材料准备:安诺六轴桌面机械臂一台;创客版控制箱;电脑一台;RobotAnnoController控制软件;330ml饮料若干罐,一次性水杯若干,固定水杯位置的木板,胶枪或夹子,抹布,垃圾桶,接线板,宽60cm,长120的桌子一张;1.布置场景首先机械臂,水杯,饮料摆放的位置要确定,在这里我将饮料瓶放在桌子左侧边缘离正前方18cm,机械臂在自己面前方便控制。水杯在机械臂正前方33cm,离左侧桌子16
8.1基本概念 8.2三次样条 8.3Bezier曲线曲面 8.4B样条曲线曲面 8.5有理样条曲线曲面一、曲线曲面数学描述的发展弗格森双三次曲面片孔斯双三次曲面片样条方法Bezier方法B样条方法有理Bezier非均匀有理B样条方法二、曲线曲面的表示要求唯一性 几何不变性 易于定界 统一性 易于实现光滑连接 几何直观三、曲线曲面的表示1)参数法点动成线 具有几何不变性 对参数求导代替斜率,避免斜
图形学变换一、概述二、平移新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入一、概述在齐次坐标中,所有的反射变换都
easyx实现图形学中的三维变换
征稿主题:专注于捕捉、识别、建模、分析和生成形状与图像的研究。该期刊涵盖多个领域,包括但不限于:计算机动画与仿真、计算几何、计算摄影、计算机视觉、数据压缩、人机交互(HCI)、医学成像、机器学习在图形学中的应用、虚拟与增强现实、科学可视化......
1、GeosGEOS 是一个用于计算几何的C/C++库,专注于地理信息系统(GIS) 软件中使用的算法。它实现了OGC 简单特征几何模型,并提供了该标准以及许多其他标准中的所有空间功能。GEOS 是PostGIS、QGIS、GDAL和Shapely的核心依赖项。它旨在包含C ++中JTS的完整功能。 这包括用于SQL空间谓词功能和空间运算符的所有OpenGIS简单功能,以及特定的JTS增强功能。
目录一、Classical Viewing(经典/人眼观察)平面几何投影正投影 orthographic projection轴测投影 axonometric projection斜投影 oblique projection透视投影一、Classical Viewing(经典/人眼观察)Classical Viewing 需要三个基本要素(1)一个或多个观察对象(2)观察者和一个投影表面(3)从物
中央子午线=当地经度的整数÷6 然后整数部分+1 再将所得结果×6 后减去3一、 基本概念:1、地形图坐标系:我国的地形图采用高斯-克吕格平面直角坐标系。在该坐标系中,横轴:赤道,用Y表示;纵轴:中央经线,用X表示;坐标原点:中央经线与赤道的交点,用O表示。赤道以南为负,以北为正;中央经线以东为正,以西为负。我国位于北半球,故纵坐标均为正值,但为避免中央经度线以西为负值的情况,将坐标纵轴西移500
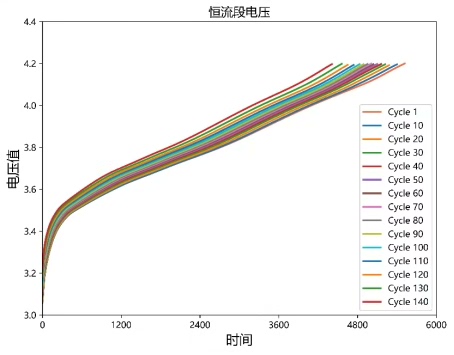
基于NASA数据集处理代码,各种健康因子提取,包括等电压变化时间,充电过程电流-时间曲线包围面积,恒压恒流-时间曲线面积,恒压恒流过程时间,充电过程温度,IC曲线峰值等健康因子,也可以提出想法来给我代码定制可用于SOH,RUL的预测一键运行,快捷方便。可接基于深度学习(CNN,LSTM,BiLSTM,GRU,Attention)或机器学习的锂离子电池状态估计代码定制或者文献复现最近在捣鼓基于NAS
记录一些图形学相关的知识点
#include<iostream>#include<graphics.h>#include<conio.h>using namespace std;void MidPoint_Circle(const int& x0, const int& y0, const int& r){initgraph(800, 640);int d = 1
计算机图形学诞生于二十世纪六十年代,主要的研究内容是研究如何使用数学算法在计算机中有效地表达、生成、处理以及显示相关图像和图形。作为一门计算机应用科学,计算机图形学近年来的快速发展极大地促进了计算机辅助设计、虚拟现实、游戏、动画、影视特效等行业的发展。为了帮助同学们更好地学习计算机图形学,我们邀请微软亚洲研究院网络图形组主管研究员董悦为大家推荐了该领域相关的经典书籍,内容涵盖图形学基础原理、渲染基
三维(3D)重建技术不仅是计算机视觉与图形学中的核心关键技术,同时也是推动虚拟现实(VR)、增强现实(AR)、自动驾驶以及数字地球等诸多前沿应用蓬勃发展的重要动力。随着神经辐射场(NeRF)和三维高斯溅射(3DGS)等新型视图合成技术的兴起,三维重建正面临前所未有的发展机遇。本文介绍了传统三维重建方法的基本原理,包括运动恢复结构(SfM)和多视图立体(MVS)技术,并分析了这些方法在处理复杂场景和
几何学
——几何学
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区


 AI编程社区
AI编程社区


 AI Agent技术社区
AI Agent技术社区

 智能体开发者社区
智能体开发者社区







 乐奇 Rokid 开放社区
乐奇 Rokid 开放社区


 DeepSeek技术社区
DeepSeek技术社区










 DAMO开发者矩阵
DAMO开发者矩阵