- @weixin_39753819
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
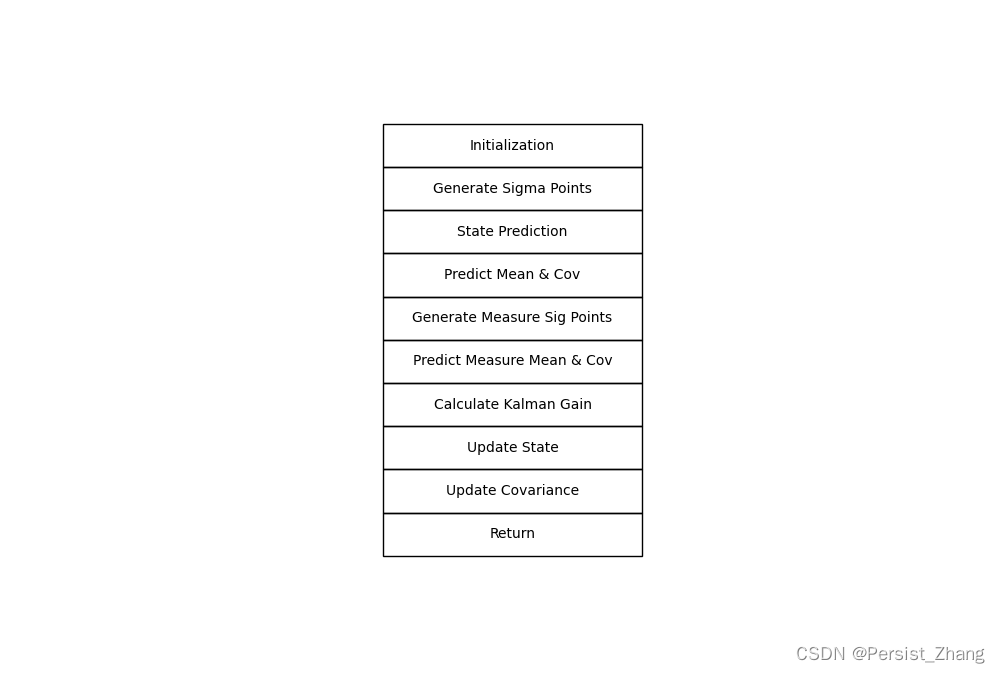
卡尔曼滤波是一种强大的状态估计方法,广泛应用于控制系统、导航、机器人等领域。然而,传统的卡尔曼滤波假设系统是线性的,而在实际应用中,许多系统具有非线性特性。为了解决这一问题,无迹卡尔曼滤波(Unscented Kalman Filter, UKF)应运而生,它通过采用无迹变换来处理非线性系统。
本文介绍了如何利用Python进行传感器数据分析,重点关注了加速度、速度和位移之间的关系。通过数值积分的方法,可以从加速度数据中计算出速度和位移数据,并通过绘制曲线图来直观展示数据的变化情况。这些分析结果可以帮助我们更好地理解物体的运动状态,为实际应用提供支持。

在机器学习中,超参数是在模型训练之前需要手动设置的参数,例如学习率、正则化参数、树的数量等。这些超参数的选择对于模型的性能和泛化能力具有重要影响。而网格搜索法是一种通过遍历指定的超参数空间来寻找最佳超参数组合的方法,它通过穷举搜索的方式寻找最优解,是一种简单而有效的超参数调优方法。本文介绍了自动化机器学习中的网格搜索法,通过穷举搜索超参数空间来寻找最佳超参数组合。通过Python实现了一个简单的分

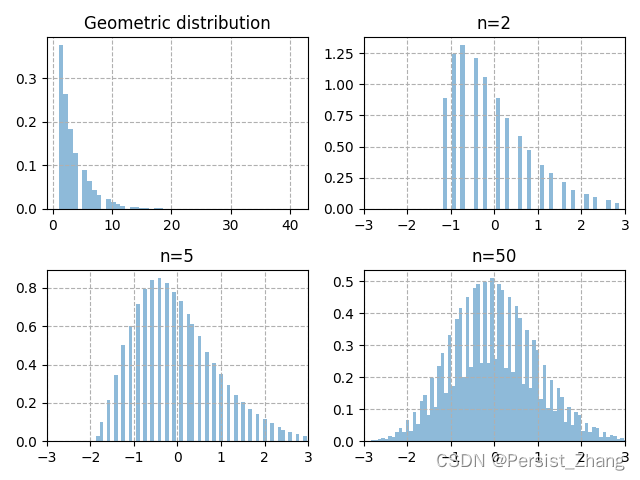
中心极限定理是概率论中的一个重要定理,它描述了在一定条件下,独立随机变量的均值经过适当标准化后,当样本容量足够大时,其分布将趋近于正态分布。中心极限定理在统计学和实践中具有广泛的应用,尤其是在推断统计学中。
传感数据分析对于传感领域的研究者或者上班族是极其重要的事情。本文就传感数据分析中的数据读取绘制进行叙述。提示:以下是本篇文章正文内容以上就是本节对传感数据绘制的内容,本文仅仅简单介绍了pandas数据读取、双坐标图绘制功能的使用,对于双坐标曲线图中横纵轴的设置(字体大小、字体颜色、坐标轴范围、)和横坐标千分分隔符的设置详见资源传感数据分析-数据读取与绘图(可视化)。

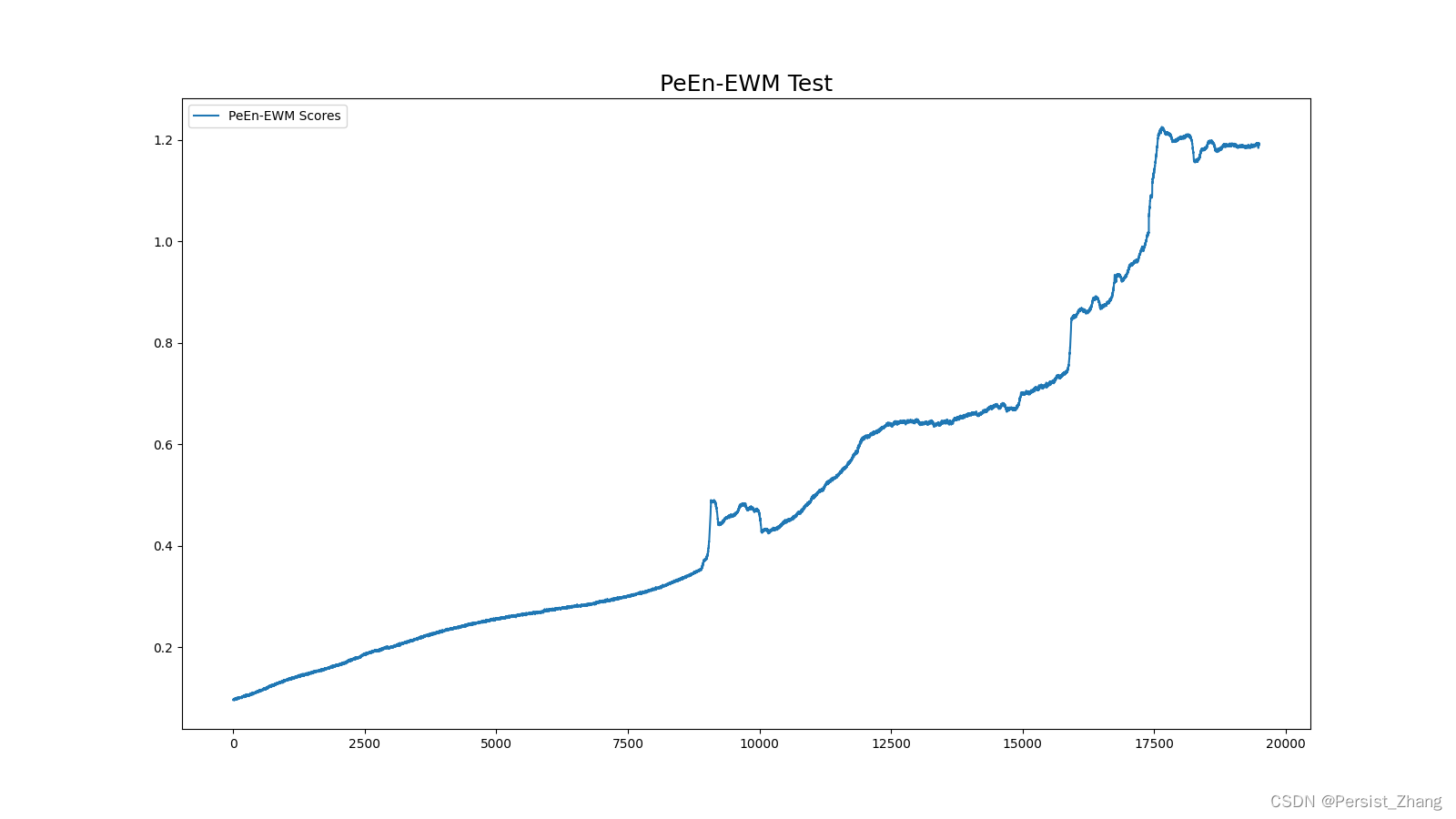
本节将叙述排列熵权法对多传感数据进行处理,并基于Python实现。