登录社区云,与社区用户共同成长
邀请您加入社区
第八届人工智能技术与应用国际会议(ICAITA 2026)将于2026年8月21-23日在北京举行,由北京交通大学主办。会议主题涵盖人工智能算法、智能系统、通信应用等方向,接收原创未发表论文。录用论文将由IEEE出版(ISBN: 979-8-3195-0720-4),并提交至EI Compendex、Scopus和IEEEXplore检索。历届会议论文检索稳定,投稿需通过学术诚信检测,严禁抄袭。详
本文介绍了二叉搜索树的基本概念、性能特点及底层实现原理。二叉搜索树遵循"左<根<右"的法则,是map/set等容器的底层结构。其查找效率最差为O(N)。文章详细解析了查找、插入和删除操作的实现方法,并附有对应LeetCode题目链接和代码示例,其中删除操作根据节点子节点情况分为四种处理方式,对左右子树均存在的节点采用替换法处理。
Python以其简洁的语法和强大的库支持著称,特别适合数据分析、人工智能和快速原型开发。Java则是先编译后运行的语言,源代码需要先编译成字节码,然后在Java虚拟机上运行。Python在人工智能、数据分析等新兴领域岗位更多,而Java在企业级开发、移动开发等传统领域需求稳定。这使得Python在某些情况下内存释放更及时,但Java的垃圾收集机制经过多年优化,在大规模应用中表现更加稳定。Sprin
/ 异步处理响应 client.newCall(request).enqueue(new Callback() { @Override public void onResponse(Call call, Response response) { if (response.isSuccessful()) { String jsonData = response.body().string();在构建
网站在这里,软件叫超级小冰,极友们可以下载试试:https://allspark.xiaoice.cn/ask?
C++函数式编程正在突破传统系统编程语言的认知边界。当Lambda表达式与不可变性原则深度融合时,不仅带来了代码层面的函数式简洁,更在硬件层面触发了根本性的性能跃迁。未来十年,这种将系统层级优化嵌入编程范式的趋势,必将重塑高性能计算的架构设计与开发方法论。
后来我开始用「超级小冰」,感觉省心不少。现在收到表格,我只要把数据区域选中,它就能帮我分析出里面的关键信息和趋势,还会建议用什么图表来展示更直观。我再也不用偷偷摸摸去搜函数怎么写了,至少交差是没问题了。之前最头疼的就是老板突然发来个Excel文件,里面一堆数据让我分析。我根本搞不懂那些复杂的函数和数据透视表,每次都得硬着头皮上网查,效率特别低。
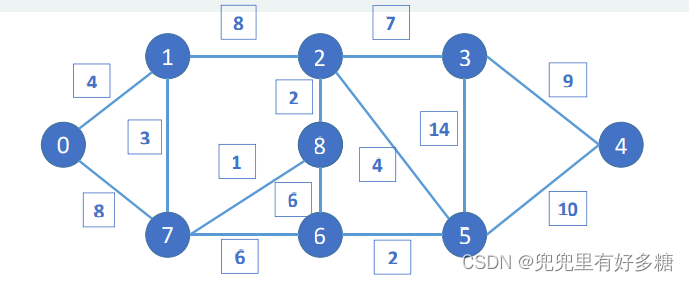
本文深入探讨了优先级队列(Priority Queue)在UCS算法中的核心作用,并手把手教你用Python实现城市路径规划。通过对比不同优先级队列实现方式的复杂度,详细解析了二叉堆在UCS中的优势,并提供了完整的代码实现和优化技巧,帮助开发者高效解决实际路径规划问题。
本文详细介绍了如何使用Python实现UCS(一致代价搜索)算法,解决带权图最短路径问题。通过对比BFS和DFS的局限性,展示了UCS在优先级队列、路径成本累积和动态调整方面的优势,并提供了优化技巧和实际应用案例,帮助开发者高效处理复杂路径规划需求。
本文详细介绍了如何使用Python实现一致代价搜索(UCS)算法,并通过动态可视化展示其在路径规划和游戏AI中的应用。文章从图数据结构构建、UCS核心算法实现到动态可视化步骤,提供了完整的代码示例和优化技巧,帮助开发者掌握这一关键的图搜索算法。
本文详细介绍了如何使用Python优先级队列实现一致代价搜索(UCS)寻路算法,解决带权图中的最优路径问题。通过对比BFS的局限性,展示UCS如何利用优先级队列动态选择最低代价路径,并提供完整代码实现和城市交通案例,帮助开发者掌握高效路径规划技术。
本文详细介绍了如何使用Python实现UCS(一致代价搜索)算法来解决最短路径问题。通过优先级队列和邻接字典的应用,UCS比传统BFS更适合处理带权图的最小代价路径搜索。文章还涵盖了动态更新优先级队列、高效路径回溯等工程实践技巧,并提供了可视化调试方法,帮助开发者深入理解图搜索算法的核心原理。
本文详细介绍了如何使用Python实现UCS(一致代价搜索)算法来寻找最短路径,通过优先级队列和完整代码示例,帮助开发者掌握这一图搜索算法。文章对比了UCS与BFS/DFS的区别,并提供了实战案例和优化技巧,适合算法学习者和Python开发者。
本文深入探讨了一致代价搜索(UCS)算法在Python中的实战应用,从游戏寻路到物流规划。通过对比BFS/DFS,详细解析UCS的核心原理与实现,并提供游戏开发、物流优化中的具体案例与避坑指南,帮助开发者高效解决路径规划问题。
从文字搜索到图片搜索,小红书圈选搜让搜索维度更丰富、更直观。鸿蒙6已支持小红书圈选搜。看到喜欢的穿搭、景点、家居,指关节圈一下就能直达相关笔记——从“不知道怎么搜”到“圈选即搜”。支持圈选搜笔记功能,无论是图库内还是网上搜到的景点、服饰、动漫图片,都可以指关节圈选图片,点击“识图搜索”,快速搜索到与图片内容相关的小红书笔记。点击直达笔记详情,操作更便捷,推荐更精准,彻底革新了笔记搜索体验。升级鸿蒙
简单来说:接口格式兼容 OpenAI 官方 SDK。这种调用方式:第三方接口也能直接使用。如果本身就在使用:OpenAI SDKCursorDifyOpenWebUI其实迁移到 OpenAI-Compatible API 的成本非常低。base_url=即可完成兼容。对于 AI Workflow 场景来说,统一接口确实会方便很多。
本文详细介绍了如何使用Python优先级队列实现一致代价搜索(UCS)算法,解决带权图的最短路径问题。通过对比BFS和DFS的局限性,展示UCS在路径规划中的优势,并提供完整的代码实现和实战演示,帮助开发者深入理解图搜索算法的核心原理与应用。
一个可直接运行的摩天轮动画页面,使用 Canvas + 原生 JavaScript 实现,无外部依赖。
用谓词表示农夫、狼、山羊、白菜问题一、实验目的二、基本要求三、实验软件四、实验内容:(一)猴子摘香蕉问题(二)传教士(牧师)与野人问题五、实验源代码(一)猴子摘香蕉问题(二)传教士(牧师)与野人问题六、实验结果及分析七、最佳优先搜索BFS求解传教士(牧师)与野人问题一、实验目的本实验课程是计算机、智能、物联网等专业学生的一门专业课程,通过实验,帮助学生更好地掌握人工智能相关概念、技术、原理、应用等
程序员的算法趣题Q08解题分析和python代码
【内附代码与数据集】【深大算法设计与分析】实验三 回溯法(地图填色问题)
(稍微了解即可,一般不会涉及)在一个图里每条边都有一个权值(有正有负)如果存在一个环(从某个点出发又回到自己的路径),而且这个环上所有权值之和是负数,那这就是一个负权环,也叫负权回路。存在负权回路的图是不能求两点间最短路的,因为只要在负权回路上不断兜圈子,所得的最短路长度可以任意小。含有负权重的无向图都是负权回路。例如下图,可以在2‐3之间无限循环。注意:贝尔曼‐福特算法实际上处理的是具有负权重的
已知f(n)=g(n)+h(n),g(n)代表从初始节点到n节点的实际代价,h(n)代表从n节点到目的节点的最佳路径的估计代价。h(n)=w(n),估计最优代价为“不在位”的数码数量,且满足h(n)
移动机器人运动规划 | 基于图搜索的Dijkstra 和 A*算法详解
3 - RPS 机构由三个 RPS 支链组成,R 代表转动副(Revolute joint),P 代表移动副(Prismatic joint),S 代表球面副(Spherical joint)。这种结构使得机器人在空间中具备多个自由度的运动能力,广泛应用于诸如精密定位、飞行模拟等领域。
该芯片支持输出5V、9V、12V、15V、20V电压,覆盖了生活小家电的常见电压梯级。在该方案中,ECP5702负责识别PD充电器并申请相应电压,IP2326实现电池充电管理,FP5207将电池电压升压至负载所需的工作电压。在USB Type-C的供电协议中,PD协议是应用范围较广、生态较为成熟的标准。这类设备普遍需要9V、12V、15V、20V等高于标准USB的供电电压,需要在。通过这种“前端诱
本复习笔记基于李晶晶老师的课堂PPT与复习大纲,供自己期末复习与学弟学妹参考用。一个搜索问题包括一个状态空间,一个后续函数(包括动作,成本),一个开始状态和一个目标状态。状态空间:当前“世界”所处的状态所有可能性的集合,假设整个状态空间是一段视频,那么状态就是视频的某一帧截图,它就是组成状态空间的一种可能。后续函数:搜索问题的核心,它决定了代理下一步的动作是什么,也就是通过搜索算法来得出当前状态下
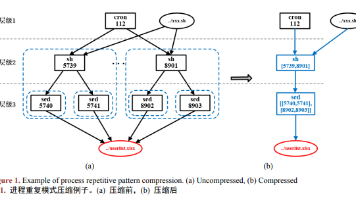
本文发现从系统审计日志构建的溯源图存在大量重复的冗余结构,这些冗余结构被分为进程重复模式和文件重复模式,并提出有效的压缩方法。本文通过进程世系树构建,文件和网络信息关联,重复满子树遍历完成进程重复模式压缩。本文通过一阶邻居相似性搜索实现文件重复模式压缩。最后,本文通过实验在真实数据集上进行压缩效果评估、攻击调查影响评估和运行时间评估,证明所提压缩方法的有效性。
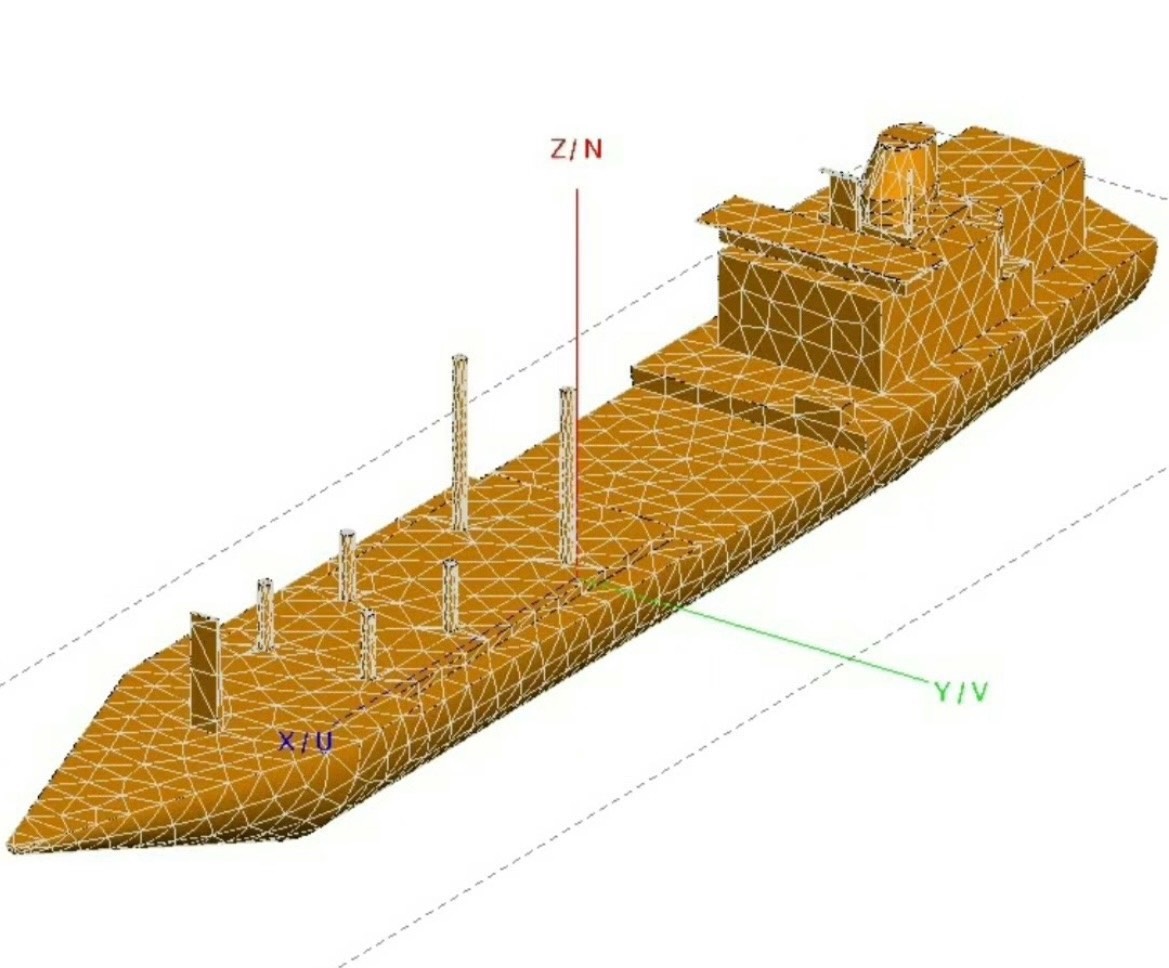
(FEKO ISAR RD成像)feko仿真单站RCS,使用其导出的.ffe数据,基于MATLAB进行RD算法的ISAR成像。可以直接运行出结果,适合初学者参考和学习!从feko仿真到ISAR成像,全流程数据和代码资料里包括:1、feko仿真工程文件2、.ffe文件3、ffe文件读取MATLAB代码4、ISAR成像MATLAB代码,详细注释由于篇幅限制,我将无法直接提供一个完整的文章,包括feko
本文深入解析了JPS算法在路径规划中的革命性突破,通过跳点机制大幅提升搜索效率。相比传统A*算法,JPS能节省90%以上的搜索时间,同时保持路径最优性,特别适用于机器人导航和游戏AI等场景。文章详细介绍了JPS的核心原理、性能对比及实现技巧,为开发者提供高效路径规划解决方案。
GitHub Copilot的基础功能不错,但中文注释的理解准确率只有82%,根据我们的测试,在处理中文需求的时候,经常会生成不符合业务逻辑的代码,而且需要额外配置模型,切换起来比较麻烦。后来,我们了解到TRAE,这款由字节跳动出品的AI原生IDE,基于VS Code架构,支持企业版私有化部署,这正好符合我们企业的安全要求,因为我们的订单、库存数据属于核心商业数据,不能出内网。部署完成后,我们团队
Anthropic AI生态系统的核心由Constitution、Claude和Agent三部分组成:Constitution作为AI的行为准则与"灵魂",包含四大核心原则和不可逾越的红线;Claude是遵循宪法训练的语言模型,具备伦理判断能力;Agent(特别是ClaudeCode)则是将智能转化为实际行动的执行工具,通过多Agent架构和工具调用实现复杂任务处理。三者共同构
战术设计回答的是:"在一个限界上下文内,对象应该如何组织,业务规则应该放在哪里?业务主权:业务建模应当凌驾于技术实现之上。永远不要让数据库 schema 反向定义你的业务模型。内核独立:领域是架构中唯一稳定的资产。确保它被“保护”在层层技术细节之内,不受外壳变迁的影响。价值驱动:DDD 是一套应对复杂性的方法论。在享受其带来的清晰边界时,必须时刻警惕过度设计的陷阱。只有当业务价值的增益超过架构维护
AI图像算法
详细介绍数据集的构建过程、特点及统计分析,并全面评测了行业和通用大模型在该数据集上的性能,后续团队将持续优化数据集,为人工智能在医疗领域的研究与应用提供有力支持。
电商采集 API 相比传统数据采集方式,在效率及关联的数据处理环节实现质的飞跃,这种革命不仅体现在速度上,还延伸到准确性、合规性等多个维度,进而推动电商全流程运营决策的变革。
【代码】淘宝拍立淘按图搜索及淘宝API(JSON数据返回)核心解析。
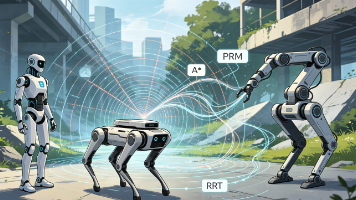
摘要: 具身智能时代下,机器人运动规划算法(A*、RRT、PRM)需适应动态环境。人形机器人通过A全局导航、RRT实时避障和PRM操作规划实现平衡与协调;四足机器人结合A地形分析与RRT动态调整,应对复杂地形;复合机器人(腿+臂)采用分层规划(A*/RRT+PRM)完成协同任务。趋势上,算法从离线转向实时滚动更新,并与感知、控制深度耦合,形成"感知-规划-执行"闭环。传统算法在
图搜索算法
——图搜索算法
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区


 AI Agent技术社区
AI Agent技术社区





 人工智能6S服务平台
人工智能6S服务平台


 DAMO开发者矩阵
DAMO开发者矩阵









 脑启社区
脑启社区
 AtomGit AI 社区
AtomGit AI 社区
 AtomGit开源社区
AtomGit开源社区





 快递鸟社区
快递鸟社区



 魔珐星云开发社区
魔珐星云开发社区