登录社区云,与社区用户共同成长
邀请您加入社区
本文系统分析了Ubuntu成为云服务器首选操作系统的原因及其在AI时代的价值。首先指出Linux在云计算中占据主导地位,而Ubuntu因其开源免费、稳定性高、资源占用低、安全模型完善以及自动化生态丰富等优势脱颖而出。文章对比了主流服务器操作系统,显示Ubuntu在云原生支持、AI/GPU适配和社区资源方面表现突出。特别强调Ubuntu已成为AI基础设施的事实标准,与NVIDIA工具链深度集成,被云
面向无人机、机器人、嵌入式调试场景,如果你经常在 CAN 总线、串口日志、飞控外设之间来回切换,那么 CUAV 雷迅创新这款 CAN Babel 值得关注。它的核心卖点很直接:一个 USB 设备,同时覆盖 USB-CAN 和 USB-UART 两类调试需求。下面这篇不是只看官网参数的“纸面测评”,我也把实物上手、电脑识别和飞控接入的照片一起放进来了。这篇文章主要从三个角度展开:第一是看它的产品定位
解决: update mbr file fail 或者 unable to open file rootfs.fex
jetson nano 16g版的ros安装和学习
公司之前有一台Xavier,环境啥的都配置好了在使用这,但是以后量产后每台机器总不能都手动配环境软件吧,所以就决定将装好环境的Xavier的Ubuntu系统拷贝下来,欢迎使用Markdown编辑器你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Markdown的基本语法知识。新的改变我们对Markdown
如果出来有这个符号,就说明库被正确编译了,基本上这种问题,只会在跨平台编译才会出现,比如用NDK编Android下工作的boost库。2、在 libs/context/build/Jamfile.v2 文件中新增架构,如新增ARM架构(跟上面遥相呼应)。1、架构改成 nano libs/context/build/Jamfile.v2 文件之中存在的架构(当然要改对)。这个 ARM 就是架构的意思
命令也可以获取到 Ubuntu 代号。只获取 Ubuntu 的基本信息。,与之相对的arm、pcc等都不是。
1、安装ubuntu20.4 TLSubuntu20.4 下载地址:https://mirrors.zju.edu.cn/ubuntu-releases/20.04.2.0/ubuntu-20.04.2.0-desktop-amd64.isocentos7.9 arrch64下载地址:http://mirror-hk.koddos.net/centos-altarch/7.9.2009/isos/
首先得知道是什么电平的如果串口在dev目录不显示,可能是设备树中禁用了,改成okay即可通信: 利用串口调试助手—》测试接受和发送。测试板子发送信息:观测串口调试助手是否接收到信息。这里注意波特率要设置成一样的,如果接收不到信息,我们可以尝试把波特率进行调低,如调整到9600。
一台是<jetson nano的ubuntu 一台是自己笔记本电脑的ubuntu目的是用jetson跑笔记本电脑上面的程序提前下载的东西:sudo apt install net-toolsifconfignetstat -ntlp|grep 22(并非所有进程都能被检测到,所有非本用户的进程信息将不会显示,如果想看到所有信息,则必须切换到 root 用户)sudo apt-get inst
Ubuntu16.04安装Pycharm2017.2
File "/home/windy/mininet/custom/wireshark.py"......File "/usr/lib/python2.7/subprocess.py", line 1343, in _execute_childraise child_exceptionOSError: [Errno 13] Permission denied这个错误通常是由于tshark命令不存在或
introduction打算用jetson tx2做一个MPC的控制项目。Jetson TX2 官网资源的构成从FAQ开始入手:了解TX2 的基础然后入手 JETSON tx2 的wikihttps://elinux.org/Jetson_TX2...
gazebo仿真问题
Ubuntu 配置Pycharm/Clion 快捷方式
aside>✅本文只记录,不涉及具体机器人、相机、目标分割或抓取任务代码。所有版本、命令和输出均来自一台实际完成安装并成功推理的设备。</aside>
Coredump(核心转储)是程序异常终止时操作系统自动生成的一个文件,它包含了程序崩溃时的完整内存状态。确定程序崩溃的位置(函数调用栈)查看崩溃时的变量值分析内存泄漏和越界访问问题重现难以复现的偶发性崩溃✅ 在指定目录生成格式化的 coredump 文件✅ 支持 SUID 程序(如 Qt 应用)的 coredump 生成✅ 确保系统重启后配置仍然有效✅ 避免与系统默认的 apport 服务冲突✅
本文介绍了Linux操作系统的进程调度机制。主要内容包括:1)Linux采用O(1)调度算法,通过140个优先级队列实现高效调度;2)使用bitmap位图快速定位待调度进程;3)为解决进程饥饿问题,设计active和expried双队列轮转机制;4)支持进程抢占,优先级高的新进程可直接插入active队列;5)通过cpu_load实现多CPU间的负载均衡。文章通过实例解释了实时操作系统和分时操作系
任务目标↓路径规划(去哪?怎么避障)↓轨迹规划(怎么平滑运动)↓| |↓ ↓运动学控制 动力学控制PD控制 计算力矩↓重力补偿↓接触环境?| |否 是位置控制 阻抗控制↓电机执行↓传感器反馈↓修正运动。
ROS2 Jazzy 是 Ubuntu24.04 官方适配的 LTS 机器人开发框架,原生支持 SLAM 建图、Nav2 导航、MoveIt2 机械臂控制、Gazebo Harmonic 仿真及各类传感器数据处理,适用于课程实验、AGV 小车、机械臂、无人机仿真开发场景。
OpenClaw(前身为 Clawdbot / Moltbot)是一个开源、自托管的个人 AI 助手网关,采用 MIT 协议,由 Peter Steinberger 主导开发,GitHub 仓库位于。
PXE(Preboot eXecution Environment,预启动执行环境)是由 Intel 公司开发的一种网络引导技术。它允许计算机通过网络从远程服务器下载并启动操作系统镜像,而无需依赖本地存储设备(如硬盘、U盘或光驱)。核心思想:将启动过程分为两个阶段。第一阶段由网卡上的 ROM 芯片(或 UEFI 固件)中的 PXE 客户端完成,它通过 DHCP/TFTP 协议获取初始引导文件;第二
本文介绍了Linux系统的起源与发展、学习价值、开源精神及主要发行版。Linux由Linus Torvalds于1991年基于Minix开发,继承了Unix的稳定性与开源特性,广泛应用于服务器和超级计算机领域。学习Linux主要因其高性能、低风险、低成本等优势,而非单纯因为开源。常见的Linux发行版包括企业级的Red Hat、免费的CentOS、面向开发者的Fedora、稳定的Debian、用户
GRUB2是Linux系统最常用的引导加载程序(Boot Loader)。它的核心职责:允许用户选择启动哪个操作系统或内核版本向内核传递启动参数(如调整运行级别、启用调试模式)提供救援模式入口单用户模式是一种维护模式,用于:重置root密码(忘记root密码时)修复文件系统错误排查启动故障移除损坏的软件包Systemd 是 Linux 系统的初始化系统(init system)和服务管理器,PID
实现一个情绪追踪日记应用,用户每天可以选择心情 emoji 并记录文字内容,支持历史查看、按心情筛选、心情统计和删除操作。
本文是一篇操作系统入门指南,用通俗易懂的方式讲解了操作系统的核心概念。文章首先解释了操作系统的本质是管理计算机硬件资源(CPU、内存、硬盘等),为程序提供安全稳定的运行环境。然后系统性地介绍了进程与线程、CPU调度、内存管理、文件系统等关键知识点,包括:进程状态转换、并发与并行的区别、上下文切换、虚拟内存原理、文件存储机制等。最后强调了操作系统各模块的协同工作关系,并总结了操作系统的四大核心任务:
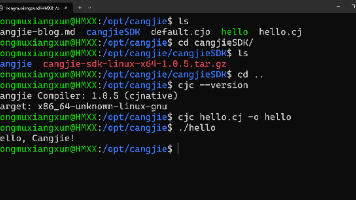
本文记录了在Linux系统上从零安装仓颉(Cangjie)编程语言SDK的完整过程。首先通过Git仓库获取SDK文件,解决了Git LFS下载超时问题,采用curl断点续传方式完成大文件下载。解压后配置环境变量,确保编译器路径和运行时库生效。最后编写并运行了第一个"hello.cj"程序验证安装成功。文章详细记录了安装过程中遇到的网络问题和权限问题,并提供了相应的解决方案,为开发者尝试仓颉语言提供
/isaaclab.sh -p scripts/demos/h1_locomotion.py第一次启动需要等待较长时间,后续再启动速度很快。cd /path/to/IsaacLab# 应已 git clone --branch v2.1.0。
本文在学习期间所著,如有侵权,小编会直接删除。
本文记录了将Qwen2.5-VL视觉语言模型接入ROS2机器人系统的实践过程。作者在WSL2 Ubuntu 24.04环境下,基于Unitree Go2四足机器人平台,整合ROS2 Jazzy、Gazebo Harmonic仿真环境和Qwen2.5-VL-3B模型,构建了完整的视觉感知系统。文章详细介绍了Unitree ROS2环境的配置步骤(包括解决WSL2时钟同步问题和网卡设置),以及创建VL
本文介绍了ROS1与ROS2的核心区别、Ubuntu系统安装步骤及ROS2环境配置方法。首先对比了ROS1(基于Master节点)和ROS2(采用DDS通信机制)在架构、API和编译系统上的差异。接着详细图解了Ubuntu 22.04在VMware中的离线安装流程,重点解决了网络安装报错问题。最后通过fishros一键脚本完成ROS2(Humble版本)的安装,并展示了小海龟示例程序的运行验证。整
可能写的有点粗糙,但是我搞通了,有不懂的可以问我,懒得再更新了
YOLOv5 一键安装器,多系统下快速部署 CPU/GPU 训练环境
首次运行时,模型会自动从HuggingFace下载,需要稳定的网络连接。确保服务器能够访问外网,特别是HuggingFace模型仓库。命令向容器的 8000 端口发送一个聊天补全请求。字段包含了模型生成的文本内容。:你将收到一个 JSON 格式的响应,其中。安装完成后需要重启系统以加载新的驱动。编辑Docker配置文件。安装完成后,可以使用。
使用b站up主 @人工大黑 给的链接。2.购买deepseek-v4(主要是因为便宜。1.安装claude code。买完后复制好给的api。
ubuntu
——ubuntu
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区

 DAMO开发者矩阵
DAMO开发者矩阵


 深开鸿 技术专区
深开鸿 技术专区
















 智能体开发者社区
智能体开发者社区



 人工智能6S服务平台
人工智能6S服务平台

 EazyDevelop社区
EazyDevelop社区

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区
 2048 AI社区
2048 AI社区




 AI编程社区
AI编程社区




