登录社区云,与社区用户共同成长
邀请您加入社区
产品迭代的核心不是“加功能”,是“解决问题”。本文记录了简记往来上线以来由用户反馈驱动的6次关键更新:批量记礼容错增强、多人协作权限细分、数据导出、多账本模式、搜索性能优化、金饰记录支持。同时首次公开了一个“不做”的决策——拍照识别礼账本功能。经过近两周技术调研,测试了DeepSeek、文心一言、豆包等主流大模型,手写礼账本识别准确率不到60%,且开发及算力成本极高。作为免费产品,我们选择把好钢用
摘要: 独立研究员TESHYASI提出了一种突破性具身智能架构,通过零散模块无感动态组合解决了传统AI的算力依赖、泛化性不足等核心缺陷。该系统具备八大专业模块,支持全感官输入与物理执行,通过双核认知中枢实现毫秒级闭环响应,并创新性地引入内生安全过滤与离线混沌自学习机制。实验观测到系统在无指令时能自主生成内容,表现出独特的"认知自协调"行为。该低功耗、高鲁棒性架构在自动化、边缘计
TESHYASI发布技术白皮书,提出基于零散模块动态涌现的具身智能架构,实现从"知识堆砌"到"自主认知"的突破。该架构通过三大核心机制:模块化组件库提供灵活性,闭环反馈回路实现智能涌现,具身化系统支持自我进化。区别于传统AI,TESHYASI强调智能的可解释性、物理存在感及情感理解能力,宣称其系统具有类似生命体的自生长特性,能主动优化认知结构并理解数据背后的
本周OpenAI GPT-5.6系列预计发布(上下文窗口扩展至150万token、新增三项Agent能力),谷歌DeepMind两天内流失AlphaFold发明人John Jumper和Transformer核心作者Noam Shazeer——全球AI人才向最前沿集中、模型以周为单位迭代
一个可直接运行的摩天轮动画页面,使用 Canvas + 原生 JavaScript 实现,无外部依赖。
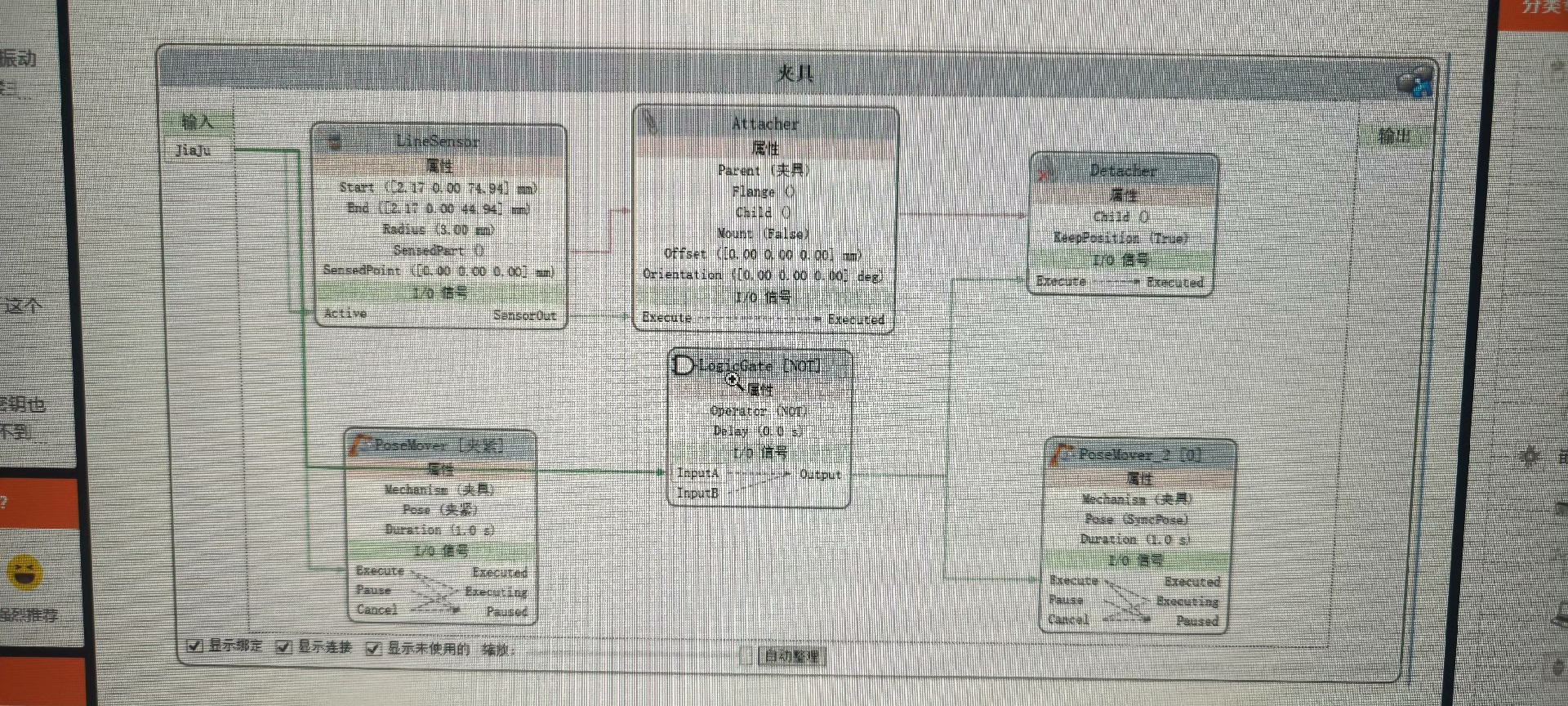
搞过机器人编程的都知道,动态跟踪传送带上的物料坐标才是真本事,这时候不用中断程序(TRAP)绝对手忙脚乱。码垛模块有个坑要注意:当物料的Z轴与夹具不垂直时,一定要在Stack模块里勾选ToolReorientation选项,否则叠到第五层绝对翻车。仿真时看到输送链上的物料丝滑移动,机器人精准抓取,那种成就感比通关黑魂还带劲。abb机器人搬运,各种码垛,机床上下料,涂胶,点焊,弧焊,机器人写字绘画等
实际跑起来可能会发现机器人有时会在障碍物附近震荡,这时候需要调整速度采样的分辨率,或者增加航向角对准目标的评分项。我们的代码里直接把地图矩阵当坐标系用,实际部署时需要处理地图分辨率参数。注意这里三个权重的调节技巧:障碍物距离权重最大,但实际调试中发现当目标点周围布满障碍时,需要适当提高目标权重。这里用的是最基础的运动学模型,实际可能需要考虑轮式机器人的运动约束。轨迹预测时长建议设置在2-5秒之间,
本文介绍了梯度下降算法的核心原理及其在机器学习中的应用。梯度下降是一种通过迭代调整模型参数以最小化损失函数的优化方法,其核心思想类似于"下山"——沿着损失函数下降最快的方向逐步调整参数。文章首先通过直观的山谷下降类比解释梯度下降的基本概念,然后详细阐述了梯度下降的数学原理,包括参数更新公式和学习率的作用。通过一个简单的二次函数示例,展示了梯度下降如何逐步逼近最优解。最后,文章讨
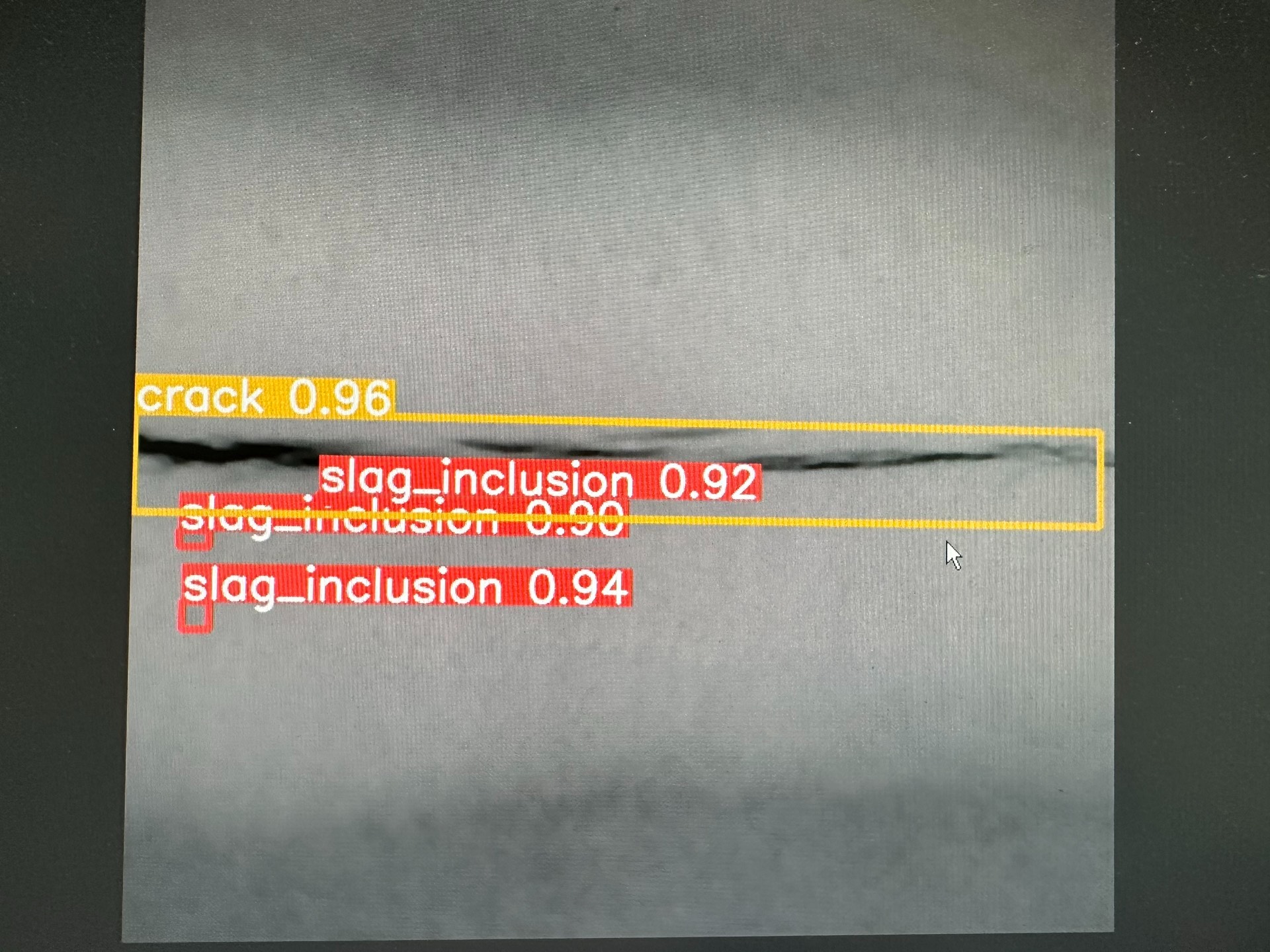
最近折腾了个X射线底片数据集,5232张带VOC格式标注,包含裂纹、气孔、夹渣、未融合四类缺陷。先上段数据增强的骚操作。构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…这套组合技重点保留缺陷区域特征,在保持标注框有效性的同时
CREATE DATABASE 语句用于创建数据库。
本文探讨了HermesAgent自进化智能体系统的企业落地路径,指出理解技术架构与实际部署之间存在巨大鸿沟。文章提出了五阶段部署路线图(评估期→试点期→扩展期→优化期→自治期),并详细拆解了8周Pilot计划的关键步骤,强调影子模式和安全评估的重要性。针对部署中的四大致命陷阱(过度信任、记忆膨胀、Skills碎片化、安全忽视)给出了具体解决方案。通过12个月真实ROI数据展示了自进化系统的复利效应
本文测评了谷歌最新推出的Gemini3.5-flash大模型,通过国内免翻墙AI镜像站进行实测。文章从四个维度展开:1)模型核心升级解析,突出其低延迟和长上下文保持能力;2)代码能力测试,展示其生成生产级Python代码的质量;3)多模态表现,验证其视觉推理深度;4)行业影响,探讨该模型如何改变中小团队的AI选型策略。测试表明,Gemini3.5-flash以较低成本实现了接近旗舰模型85%的性能
环节书匠策AI怎么帮你选题智能生成多个可选题目,免费大纲三级大纲一键出,可上传开题报告,支持选图表/公式/代码文献自动匹配强相关参考文献,中英文都行格式找不到模板找客服加,内容生成后免费套格式书匠策AI不是替你放风筝,它是帮你把风筝造好、把线理好、把风算好。最终那个站在操场上抬头看风筝的人,还是你自己。工具再好,论文署名写的是你的名字。所以,合理用、聪明用,别偷懒,但也别死磕。👉书匠策AI官网?
简单来说:接口格式兼容 OpenAI 官方 SDK。这种调用方式:第三方接口也能直接使用。如果本身就在使用:OpenAI SDKCursorDifyOpenWebUI其实迁移到 OpenAI-Compatible API 的成本非常低。base_url=即可完成兼容。对于 AI Workflow 场景来说,统一接口确实会方便很多。
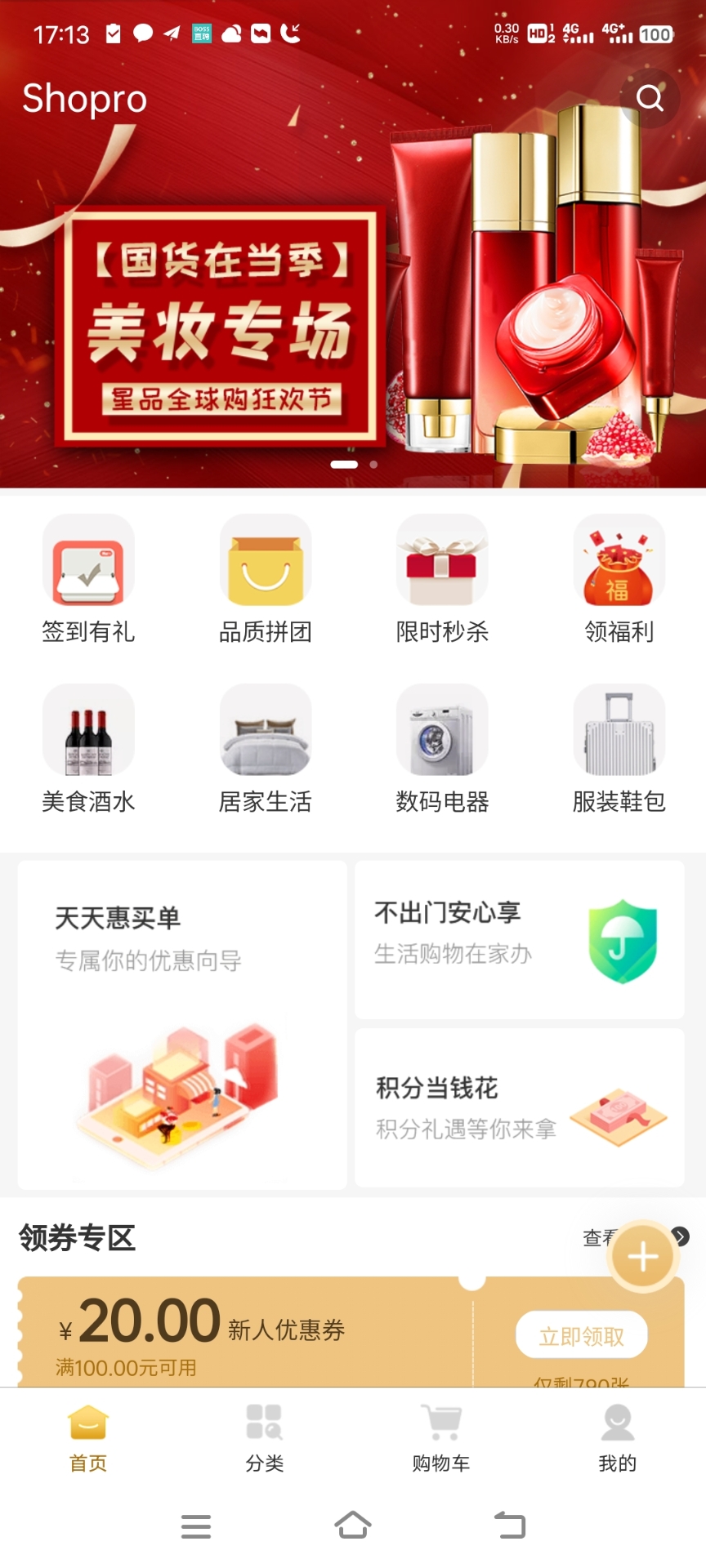
二次开发最坑的是插件升级冲突,建议在extends目录里搞继承开发。最近在折腾FastAdmin+Shopro的uniapp分销商城时发现,有些功能得自己动手才能满足运营需求。改完记得在后台权限管理里把新加的功能路由配上,不然运营妹子又要炸毛。这套组合拳打下来,基本上能满足90%的分销定制需求,剩下的10%就看客户钱包厚度了。数据库层面得注意分佣记录表的扩展性。缓存策略也得优化,分销配置这种高频读
在古埃及,人们使用单位分数的和(形如1/a的,a是自然数)表示一切有理数。例如2/3=1/2+1/6,但不允许2/3=1/3+1/3,因为家属中间有相同的。首先加数少的比加数多的好,其次,加数个数相同的,最小分数越大越好。for循环判断条件fm*(maxl-l+1)>i*fz,假设后面的分数都是1/i,如果在指定的层数之前,1/i×剩余的层数都无法大于指定的分数,则减枝,以为后边的分数都要比此时1
最近接到一个物联网项目,就是做一个蓝牙控制继电器的案例,主控芯片采用国产沁恒CH592F,之前从没有用这个芯片开发过,所以对芯片并不了解,项目中有两个温度传感器,需要用到单片机ADC采集并转换成温度值,本来这个都比较简单的,也没有什么好说的,但是采集过程却一波三折,下面我给大家细细道来。后面找了好久的错误,但一直都没有找到,本来想偷懒,不想看数据手册,现在没有办法了,只能拿出手册仔细查看了,不看不
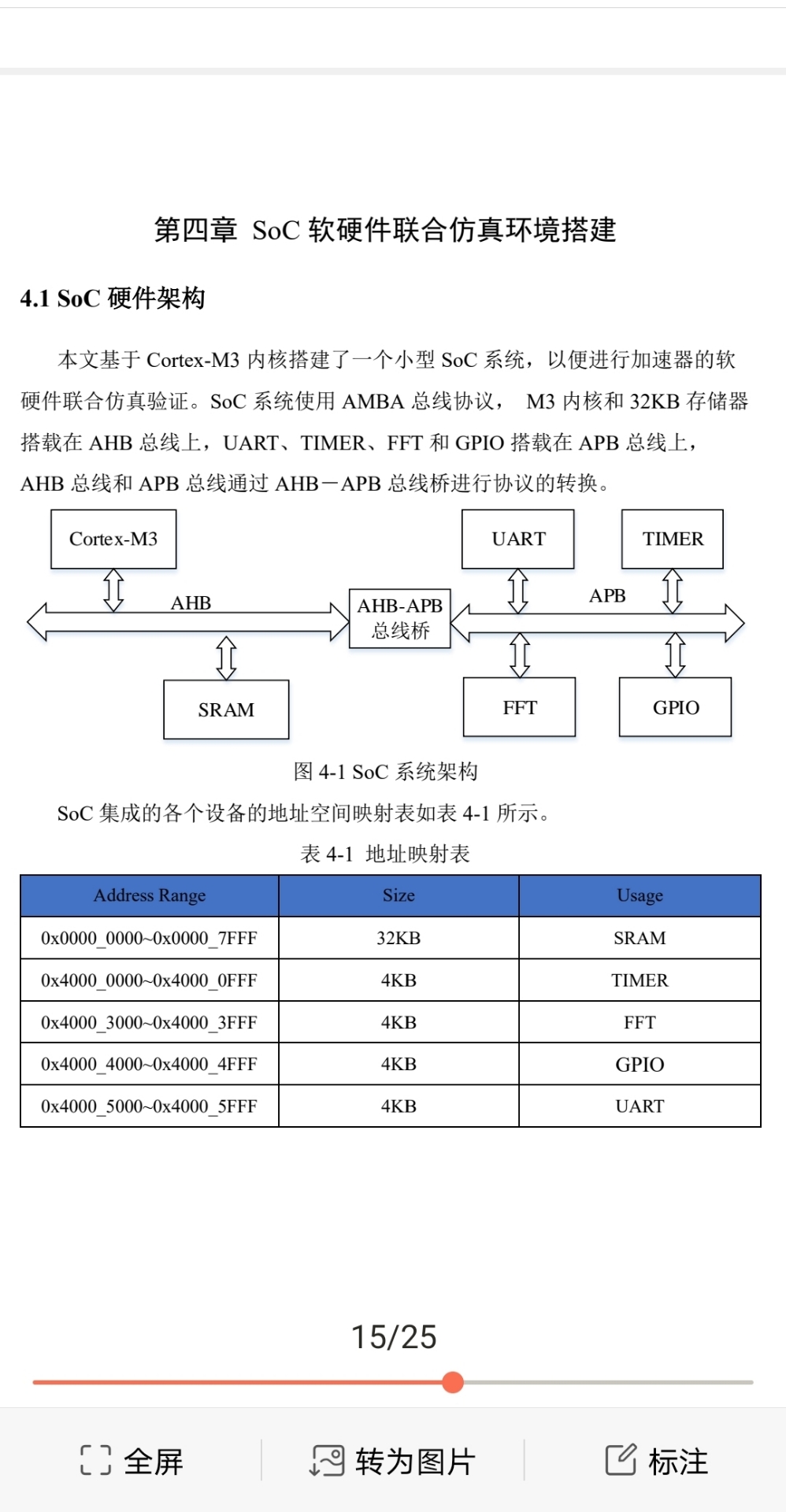
基于CORDIC的FFT硬件加速器实现,并将其搭载到小型SOC系统上,工程包含:1 设计文档2 系统verilog代码3 keil纯软件实现算法4 算法matlab代码在数字信号处理(DSP)的诸多应用场景中,快速傅里叶变换(FFT)是实现信号频谱分析、滤波、调制解调等功能的核心算法,广泛应用于雷达、宽带通信、图像处理等领域。随着嵌入式系统对实时性、低功耗和高集成度的需求不断提升,传统纯软件实现的
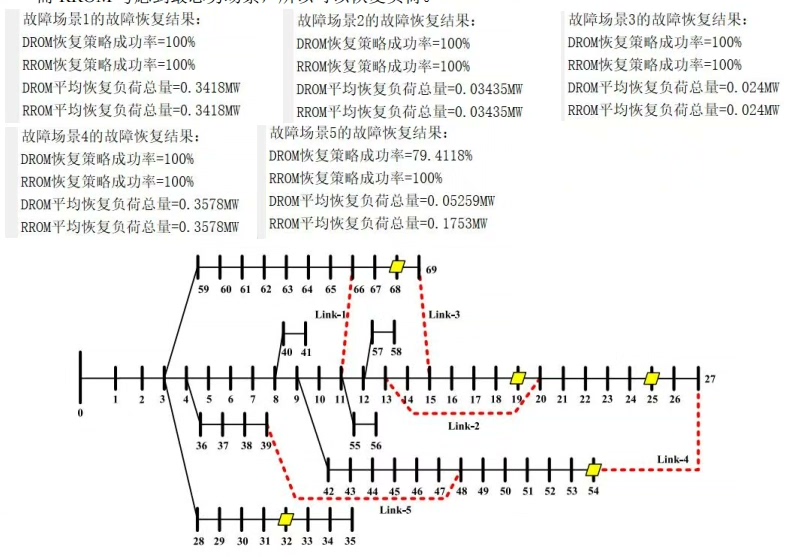
1020-(顶刊复现)配电网两阶段鲁棒故障恢复(matlab实现)参考资料为:《Robust Restoration Method for Active Distribution Networks》复现自中科院一区期刊IEEE Transactions on Power Systems使用matlab+yalmip+gurobi进行求解代码逻辑清晰,注释详细本文提出了一种具有两阶段目标的可调鲁棒恢
模型包里附带的参考文献才是真正的宝藏,特别是那份2003年的SAE论文,里面详细揭秘了魔术公式中各个参数的物理含义。不过要提醒新手的是,直接拿默认参数去仿真超载卡车工况,回正力矩的输出可能会让你怀疑人生,这时候就得回到那个载荷-摩擦系数模块里微调分段函数的转折点了。注意看那个(1 - 0.5*C)的骚操作,这其实是给纵向力和侧向力耦合留的后门。模型里有个特别有意思的"载荷-摩擦系数"转换模块,这玩
本方案是「核心用户精准反馈+人工闭环」基础方案的增量进阶版,核心目标是在现有豆包产品/技术框架内,通过新增轻量模块,解决基础方案的隐性短板,实现「噪音更少、人工成本更低、迭代周期更短、落地风险更低」的核心用户共创驱动模型升级,全程合法合规,改造成本可控,兼顾短期落地效率与长期迭代收益。核心逻辑:核心用户共创+AI自主升级+灰度验证闭环,复用现有核心用户体系、结构化反馈、AI匹配引擎等基础功能,新增
电池充电放电控制 Matlab/simulink仿真搭建模型:介绍:该模型介绍了在案例研究中实现的电池充电/放电控制,该案例研究涉及直流总线(恒定电压)、电池、公共负载和双向双开关降压-开压 DC-DC 转换器。电池充电和放电的控制基于两个PI控制器:提供以下帮助:波形纪录参考文献仿真文件电机参数说明仿真原理结构和整体框图在电力系统和能源管理的研究中,电池充电放电控制至关重要。
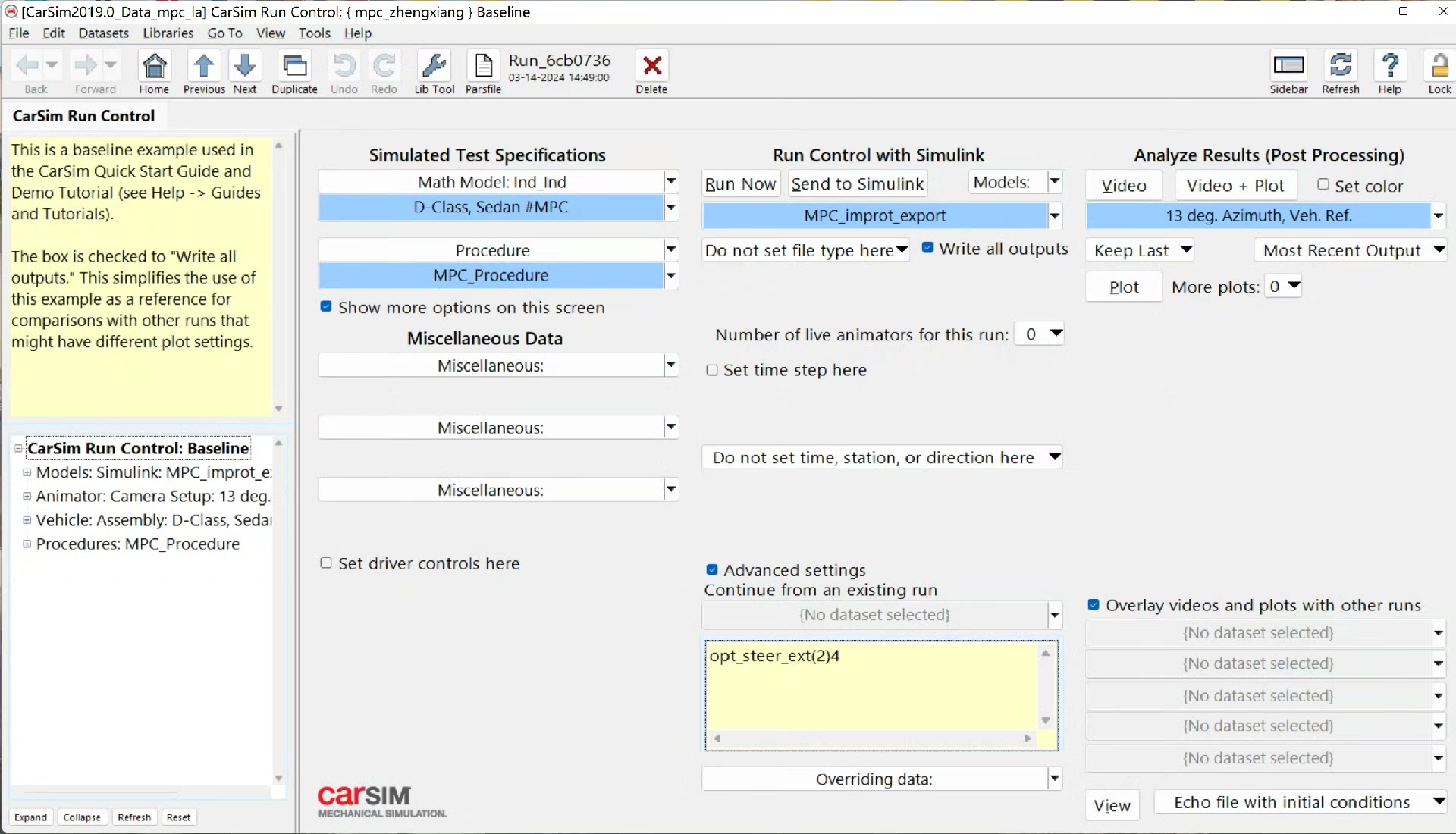
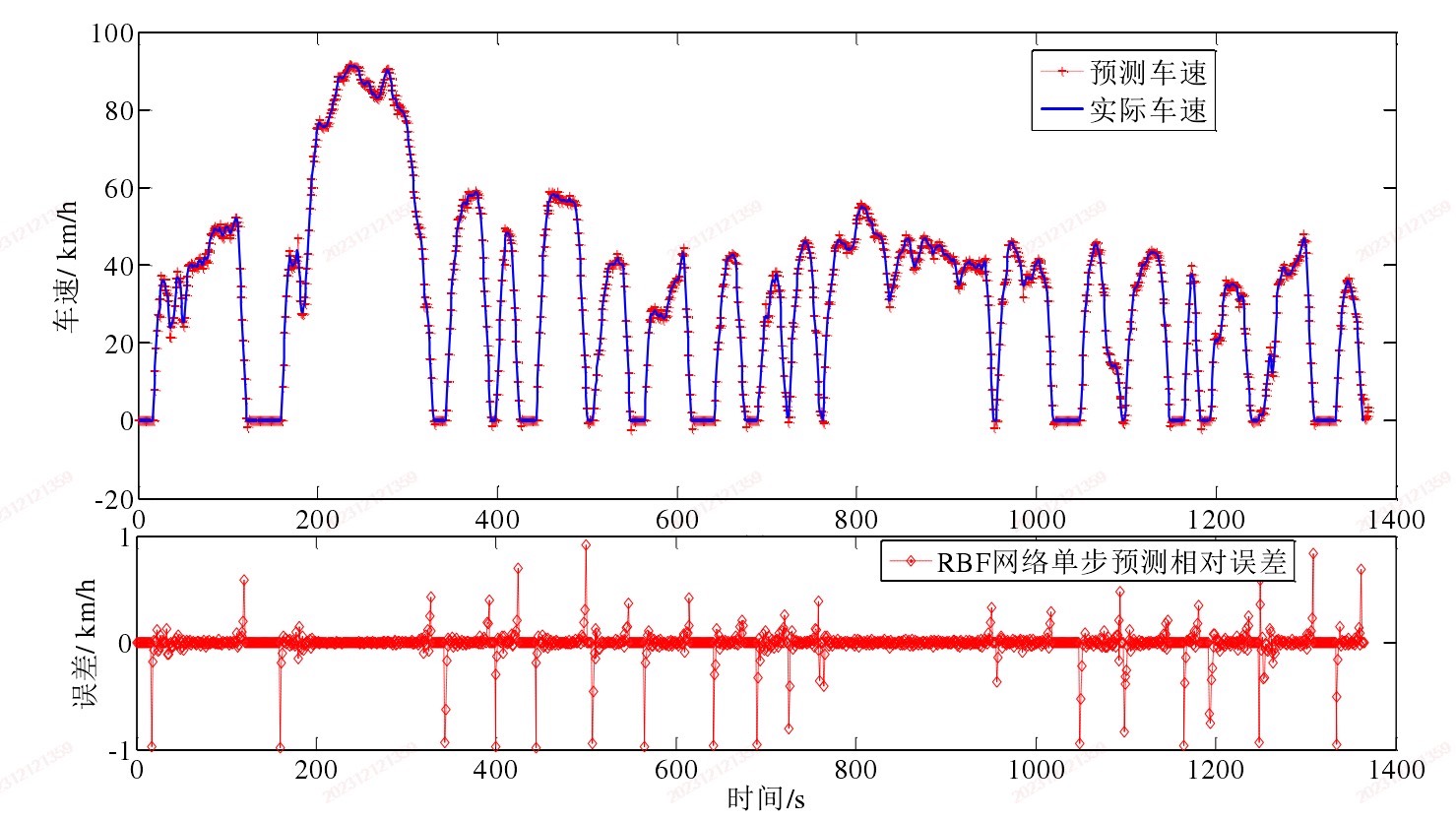
动态规划算法DP在混合动力汽车能量管理策略开发上的运用。可以结合车速预测模型(BP或者RBF神经网络,预测模型资料也有发在其他链接)根据预测的信息对车辆进行控制可以对混动汽车的能量管理具有一定的参考意义。DP动态规划程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的预测时预内的混动优化算法!——和模型预测MPC结合运用,加上预测模型可实现在线预测近似实时最优!!(本人编写DP就是与
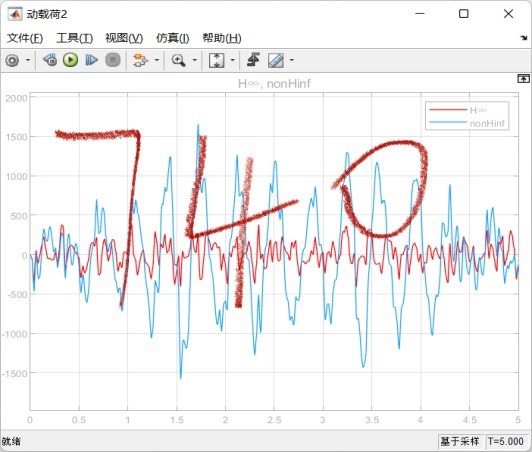
通过 Matlab & Simulink 对基于最优控制的汽车 1/4 主动悬架系统进行仿真,利用 lqr 和 Hinf 控制方法,可以有效改善悬架系统性能。lqr 基于二次型性能指标优化,而 Hinf 更侧重于应对不确定性。大家可以根据实际需求选择合适的控制方法,调整参数,探索更多悬架系统的奥秘。希望这些现成模型和代码能给你的研究或学习带来帮助,一起在汽车工程仿真的世界里折腾吧!基于最优控制的汽
翻译成三地址代码: (1)t1=3.14*a (2)t2=t1*a (3)area=t2 (4)t3=2*3.1416 (5)t4=t3*r (6)t5=h+r (7)t6=t4*t5 (8)s=t6。内容:设计并实现一个一遍扫描的词法语法语义分析程序,将部分C语言的语法成分(包含赋值语句、if语句、while循环语句)翻译成三地址代码,要求有一定的出错提示和错误恢复功能。内容:采用实验1的简单语
人工智能经典问题,八数码问题求解,多种搜索算法大全,BFS,DFS,UCS,A*,贪婪算法,迭代加深IDS,有界深度搜索,C语言版,保证看懂,分析到位,注释详细,没有bug
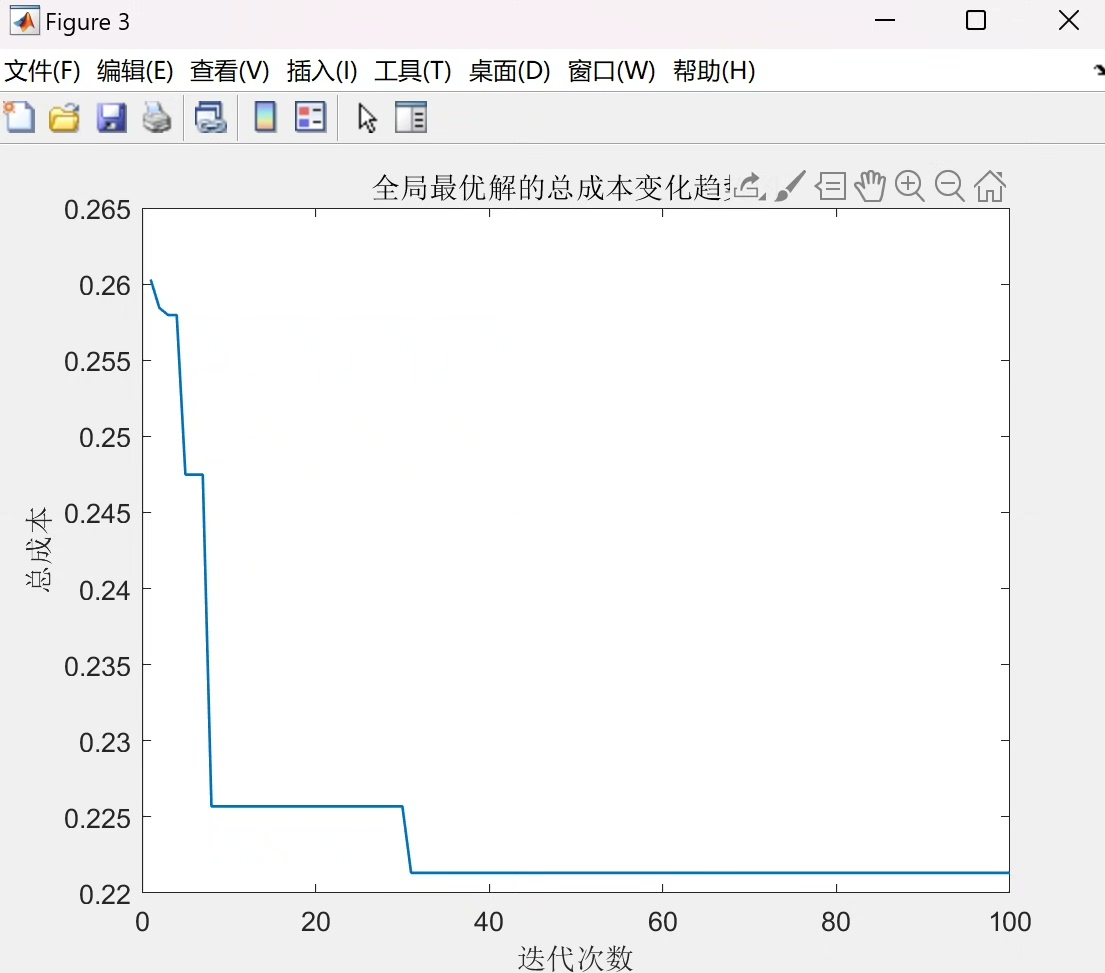
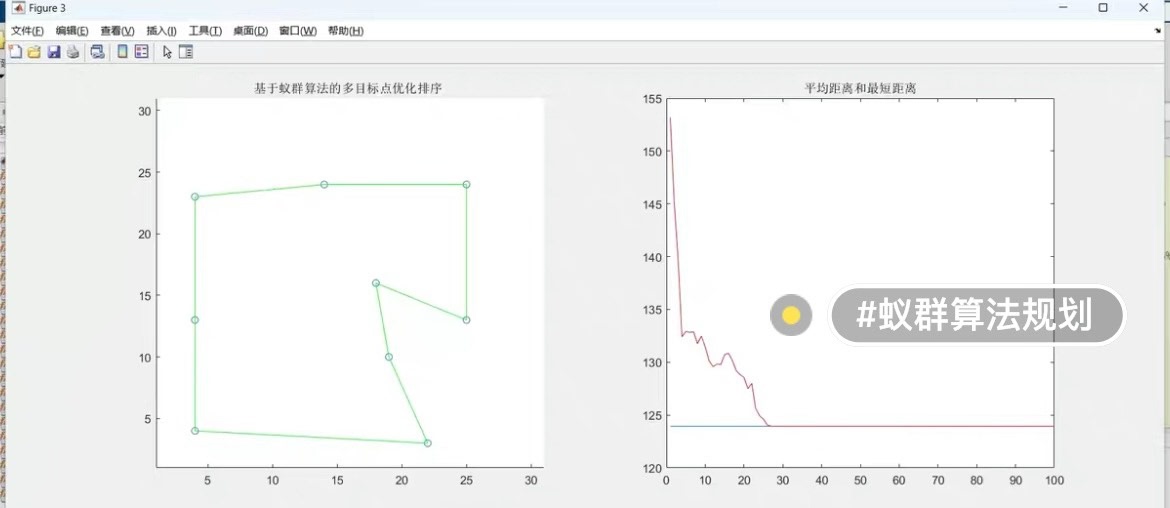
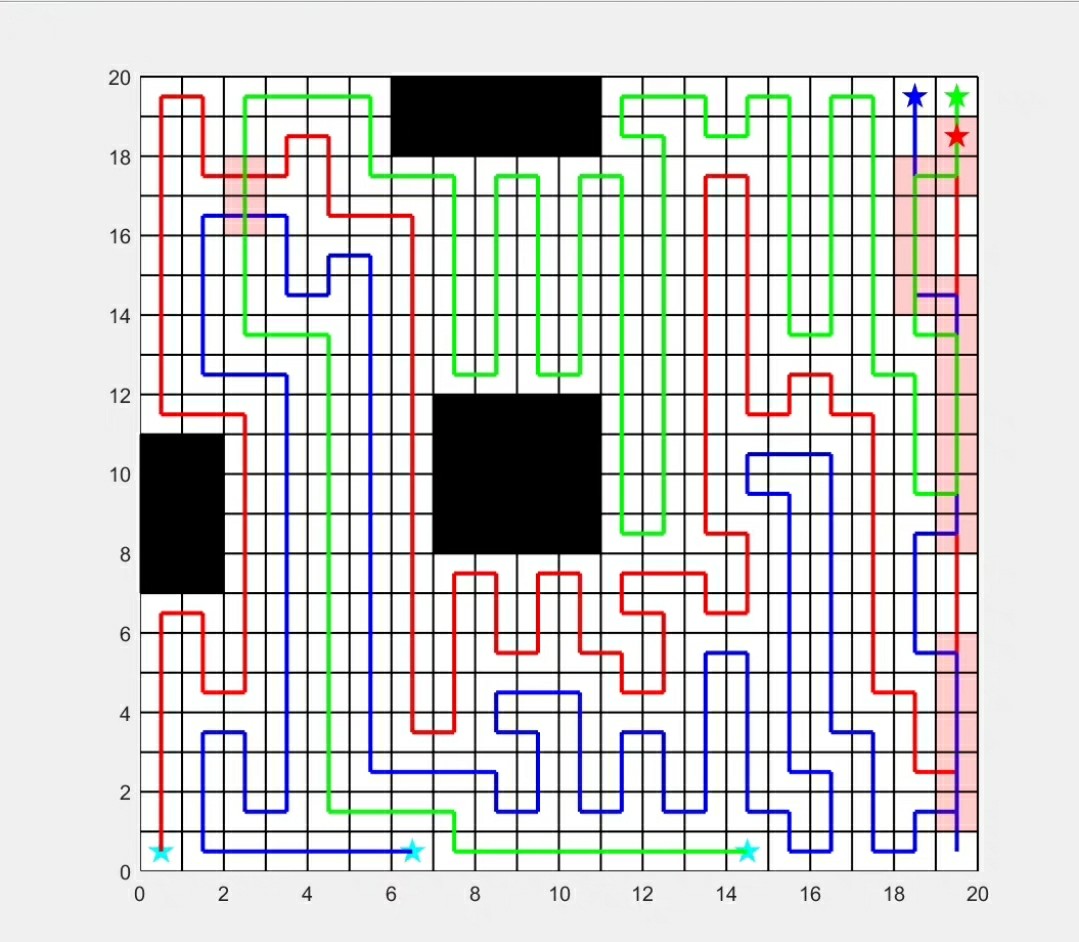
最后,我们将蚁群算法得到的目标点最优顺序与 A* 算法规划的两两之间路径进行组合,得到最终的路线。final_route.append(points[0]) # 回到起点从起点开始,依次根据最优顺序,利用 A* 算法规划相邻目标点之间的路径,并将路径上的点加入最终路线,最后回到起点。通过以上三个步骤,我们成功地用蚁群 + A* 算法解决了室内旅行商问题,为送餐移动机器人规划出了最优的路径😎。希望
本文解析开源 AI 智能体 Moltbot 的核心技术架构,详解其多平台兼容、AI 集成、向量检索等核心特性,拆解网关、Agent 等核心组件设计逻辑。同时提供本地与云端多场景部署实操指南,讲解环境配置、参数调优要点,助力快速搭建专属智能助手。
本文对比了Llama3、Qwen2.5、Mistral三款开源大模型的中文微调表现。实验采用统一任务和参数设置,结果显示:Qwen2.5在中文任务上表现最优,微调后准确率最高;Mistral显存占用最低,推理速度最快;Llama3英文能力强但中文支持较弱。建议中文开发者优先选择Qwen2.5,低算力用户考虑Mistral,英文任务可选Llama3。未来开源模型将朝着轻量化、自动化方向发展,选对合适
摘要 近五年(2020-2025)IPMC人工肌肉研究在工程化应用方面取得重要进展。针对致动端和传感端的性能缺陷,研究明确了量化指标:致动端聚焦输出力密度(阻塞力、自由位移)、动态一致性(增益/相位漂移)和循环寿命(≥10000次);传感端解决了高阻抗信号(输入阻抗≥10¹²Ω)、温湿度耦合干扰和致动/传感串扰问题。材料方面,液态金属复合电极(EGaIn)相比传统Pt电极提升驱动力41.2%,循环
4090、A6000、L40:谁是DeepSeek-R1-70B模型的最强“引擎”?附详细测试报告
盲目搜索我们将学习两类主要的搜索过程。其中之一,我们没有指定问题的任何推理信息,例如要搜索这一部分而不是另一部分,就像到目前为止的只要发现一条到目标的路径即可。这种搜索是盲目的。另一种,我们指定了要解决问题的信息以帮助集中搜索。这个过程叫启发式搜索。本章讨论盲目搜索,下一章再讨论启发式搜索过程。用公示表示状态空间很多实际问题的搜索空间是非常大的,以至于他们不能通过显示图来表示。这里我们关心下...
子串,字符串,kmp算法
图片和视频是非结构化数据,机器如果要理解某一图片或视频表达的内容,是无法直接分析的,这种情况,就需要有计算机视觉技术,通过一系列对图片/视频的分析及处理技术,提取图片/视频中的元素,将图片转化为一系列的特征,将计算机对图片的理解转化为人类可读的信息,比如文本描述、标记、图形等,也就是可被机器理解的结构化数据。计算机视觉可以模仿人的视觉系统,通过机器学习等技术解决图片和视频的分析等问题。以上是计算机
/ 自定义地图示例// true 表示障碍物,false 表示可通行这样我们就简单定义了一个 5x5 的地图,其中true标识的地方就是障碍物,机器人不能通过。我们在地图设置时就已经通过true和false来标识障碍物了。在实际应用中,可能会根据传感器数据实时更新这个地图,比如检测到新的障碍物就把对应位置设为true。
算法交易又称为黑盒交易,是指凭借IT技术的发展,利用算法完成订单拆分、挂单和撤单等交易环节,提供以成交为目的的自动化交易执行。这些券商与市场中主流的优秀算法厂商合作打造了种类丰富的策略交易平台,一般称之为“算法超市”,算法超市中汇聚了多家厂商的多样化算法,并且算法库持续更新,不断进行优胜劣汰的筛选迭代,旨在为机构投资者、高净值客户提供专业化、多元化的算法交易工具。之前的文章中我们提到过国内主流的、
【C++】vector 基本使用一,vector 的介绍 二,vector 的定义 1,vector() 2,vector(size_type n, const value_type& val = value_type()) 3,vector (const vector& x) 4,vector (InputIterator first, InputIterator last); 三,ve
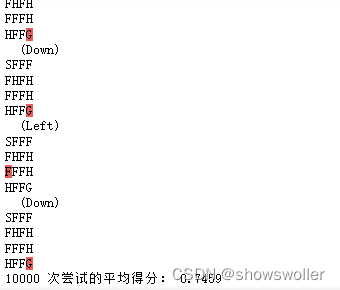
【Python强化学习】动态规划法中策略迭代和值迭代求解冰湖问题实战(图文解释 附源码)
本报告旨在为构建一个简化的AI增强型光学设计与仿真模型提供一份全面的蓝图,该模型的核心在于将传统光学设计软件(OAS)的强大仿真能力与人工智能的智能化决策和预测能力相结合。该报告重新定义了用户所提出的“简易模型”概念,将其转化为一个结构化、多阶段的可行性验证项目,以应对该领域固有的技术复杂性。核心策略是利用国产OAS软件的CPython脚本接口,自动化生成大规模、高质量的光学仿真数据集,这被视为A
迭代加深搜索(Iterative Deepening Search, IDS)是一种结合了广度优先搜索(BFS)和深度优先搜索(DFS)的搜索策略,它通过重复执行深度限制的深度优先搜索来实现。在main函数的最后,我们调用了depthFirstSearch方法,这次没有深度限制,来最终确认目标是否被找到。这是因为在实际的IDS实现中,一旦确定了目标所在的最小深度,就可以无限制地搜索以找到目标。迭代
迭代加深
——迭代加深
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net
 智能体开发者社区
智能体开发者社区


 DAMO开发者矩阵
DAMO开发者矩阵

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



 龙虾开发者社区
龙虾开发者社区




 AtomGit开源社区
AtomGit开源社区

 AI编程社区
AI编程社区

 腾讯云开发者社区
腾讯云开发者社区
 AI硬件创业社区
AI硬件创业社区
 openvela
openvela


 魔乐社区
魔乐社区

 2048 AI社区
2048 AI社区





 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区


 量化交易与投资社区
量化交易与投资社区


 智能机器人开发者大赛社区
智能机器人开发者大赛社区


 九章云极普惠算力
九章云极普惠算力