登录社区云,与社区用户共同成长
邀请您加入社区
在AI设计工具快速迭代的当下,选择适配国内合规体系、使用稳定、低门槛的本土化工具,能够有效规避账号风险、提升设计效率,也是未来国内设计行业AI工具应用的主流趋势。
第二届AI赋能图像处理与计算机视觉技术国际学术研讨会(AIPCVT2026)将于2026年11月20-22日在中国宿迁举办。会议由宿迁学院主办,聚焦人工智能、元宇宙等前沿技术下的图像处理与视觉技术创新。投稿论文将入选IEEE会议论文集(EI/Scopus双检索),优秀论文可推荐至MDPI Mathematics(SCI)特刊。投稿需为原创英文论文(≥4页),查重率≤25%,AI生成率≤20%。早鸟
搜索“PDF 翻译工具”时,能找到很多选择:Google Translate、DeepL、ChatGPT、各种浏览器插件、OCR 工具,以及专门的在线 PDF 翻译网站。问题是,这些工具并不是同一种东西。有人只是想快速看懂一页英文内容,有人要翻译论文,有人要处理产品手册,有人要把几十页报告翻译后发给同事。如果不区分场景,很容易选错工具。这篇文章从实际使用角度,对比几类常见免费 PDF 翻译方案,重
WAIC2026(世界人工智能大会)在上海落幕,标志着AI产业进入高质量发展新阶段。大会呈现三大核心趋势:1. 竞争逻辑从技术比拼转向产业落地价值,垂直领域大模型成为主流;2. 国产算力强势崛起,全栈自研解决方案实现规模化商用;3. 智能形态升级,虚拟智能体与实体具身智能双线并行。上海及长三角地区依托完整产业链和顶尖科创资源,巩固了全国AI核心承载区地位。大会显示AI技术已深度融入实体经济,落地价
GPT-image-2(ChatGPT Image 2.0)是 OpenAI 推出的新一代 AI 绘图模型,具备中文渲染精准、画面写实度高、支持 2K 高清输出等特点,非常适用于电商视觉设计、创意素材制作等场景。针对国内用户无法直连海外模型、网络受限、使用门槛高等问题,本文基于 PS 结合 StartAI 插件,提供一套本土化可落地的实操方案,无需翻墙、无海外使用成本,手把手讲解电商详情页的 AI
在当今人工智能和计算机视觉技术迅速发展的背景下,图像处理和目标检测与跟踪技术正广泛应用于安防监控、自动驾驶、智能家居及医疗影像等多个领域,成为推动现代科技进步的重要驱动力。本次会议旨在为全球的研究人员、工程师、学者及业界专家提供一个展示和讨论这些领域最新进展的平台,以促进相关领域的科学研究与技术创新。会议内容将涵盖从基础研究到实际应用的广泛主题,设有多种形式的互动环节,包括主题演讲、口头报告、海报
本文介绍了基于HarmonyOS Core Vision Kit和MindSpore Lite的AI图像处理工具开发。主要内容包括: 环境准备:使用DevEco Studio 6.1.1,配置Core Vision Kit、MindSpore Lite等依赖和相册读写权限。 核心功能实现: 封装图像处理服务类ImageProcessService 实现图像分类功能:加载MindSpore Lite
图像处理与特征提取是计算机视觉中的基础任务,在鸿蒙系统中实现高效的图像处理与特征提取不仅可以提升用户体验,还能增强应用的智能化功能。如果你觉得这篇文章对你有帮助,或者有任何想法、建议,欢迎在评论区留言交流!我是一个在代码世界里不断摸索的小码农,愿我们都能在成长的路上越走越远,越学越强!✍️ 作者:某个被流“治愈”过的 Java 老兵📅 日期:2025-08-13🧵 本文原创,转载请注明出处。
图像处理是指对图像进行编辑、优化或特效处理的过程。随着移动设备性能的提升,图像处理已成为现代应用中重要的一部分,尤其是在社交应用、相册管理、图形设计和增强现实等领域。鸿蒙操作系统(HarmonyOS)为开发者提供了强大的图像处理功能,通过Canvas和Filter等 API,使得开发者能够轻松实现图像绘制、滤镜效果和图像编辑等操作。本文将介绍图像处理的基本概念和应用,重点介绍如何使用Canvas进
图像处理是移动应用中非常重要的功能之一,无论是图片加载、显示,还是对图片的压缩和优化,都是提升应用性能和用户体验的关键。鸿蒙(HarmonyOS)提供了强大的图像处理能力,开发者可以通过图像处理 API 实现图像的加载、显示、压缩与格式转换等操作。在性能要求较高的场景下,图像优化也是非常重要的,能够有效减少内存消耗和提升加载速度。本文将介绍如何在鸿蒙中进行图像处理,涵盖图像的加载、显示、压缩和格式
PixelMap深拷贝与图片处理实践 本文介绍了鸿蒙开发中PixelMap深拷贝的实现方法和应用场景。通过readPixelsToBuffer方法实现PixelMap的深度复制,关键点在于源PixelMap需设置为BGRA_8888格式,而目标PixelMap需转为RGBA_8888格式。文章还详细讲解了图片裁剪功能的实现逻辑,包括比例计算和裁剪操作,以及最终的图片保存方法。该技术可用于需要对图片
作为"学海题库"应用的图像处理工程师,我们基于HarmonyOS的Image Kit构建了专业的教学图像处理方案。这套系统特别针对教育场景中的题目图像、手写笔记等需求进行了深度优化。"数学公式终于能自动转电子版了" —— 教师用户。"再模糊的笔记也能扫清楚了" —— 大学生用户。文档增强:自动矫正扭曲的作业本图像。公式识别:高精度提取数学表达式。在"学海题库"中的三大创新应用。智能裁剪:精准识别题
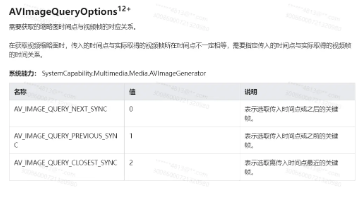
本文介绍了两种在鸿蒙系统中获取视频缩略图的方案:一是通过photoAccessHelper自动生成相册视频缩略图,获取第一个视频对象后调用getThumbnail接口;二是使用AVImageGenerator指定时间点获取缩略图,通过设置文件描述符和查询选项,间隔1秒动态获取不同时间点的视频帧。两种方案均提供了核心代码实现,适用于相册管理和视频预览等场景,展示了鸿蒙系统在媒体处理方面的开发能力。
介绍了轻量级图像压缩库的使用方法,详细说明如何在鸿蒙应用中集成压缩功能,并附有界面布局代码示例和文件操作实现。内容包含权限申请、图片选择、压缩处理等关键技术点
本文介绍了XmlGraphicsBatik项目在OpenHarmony上的应用,该项目主要用于处理SVG格式图像。文章详细说明了如何安装、显示SVG图像,并通过SVGManager类实现SVG文件的创建、操作和解析功能。具体内容包括:通过Image组件显示本地SVG文件,创建SVG对象并添加矩形等子元素,手动构建SVG文件结构,以及修改现有SVG元素的属性。该项目为开发者提供了完整的SVG处理解决
roi: [0, 0, 1, 1] // 全图检测。4K图像处理延迟降至16ms(NPU+GPU协同)场景 传统方案 Image Kit优化 提升幅度。output: 'P3' // 广色域。内存占用峰值 420MB 250MB 68%↓。人像精修耗时 68ms 12ms 566%↑。算法一致性 ±15% ±2.8% 436%↑。相同算法在麒麟/骁龙平台输出差异<3%实时皮肤质感分析(98%毛孔保
本文介绍了使用Canvas实现微信式群头像的方法。通过定义画布尺寸、头像间距和成员数量,根据不同人数(3/4/5/6/9人)采用不同的布局算法:3人和4人采用2x2网格,5人和6人采用3x2布局,9人采用3x3网格。核心代码使用CanvasRenderingContext2D的drawImage方法精确计算每个头像的位置和尺寸,最后通过getPixelMap和setPixelMap完成最终渲染。该
第二届先进半导体器件与集成技术国际学术会议(ASDIT 2026)将于2026年8月28-30日在中国江苏无锡举办。本次会议旨在汇聚全球半导体领域的顶尖学者、行业专家和企业领袖,共同探讨最新的研究成果和技术进展。会议将涵盖先进半导体器件的设计、制造、材料及其在各类应用中的创新,包括人工智能、量子计算和5G通信等前沿科技。与会者将有机会参加主题演讲、专题讨论和技术展示,深入了解行业动态,分享前沿经验
随着人工智能、大数据与新材料技术的迅猛发展,光学成像与图像处理技术在医疗诊断、智慧交通、安防监控、无人驾驶、虚拟现实等多个领域展现出巨大的应用潜力和市场需求。为进一步促进光学成像与图像处理领域的学术交流与技术创新,推动相关学科的建设与跨学科融合,第六届光学成像与图像处理国际学术会议(ICOIP 2026)将于2026年8月28-30日在中国南京市隆重召开。
基于 HarmonyOS ArkTS 相机工程,拆解前摄预览、PhotoCaptureSetting镜像、PreviewOutput旋转和人物识别框映射,建立取景、成片与算法坐标一致的实现方案。
Ollama支持在Modelfile中导入GGUF模型:创建一个名为Modelfile的文件, 使用带有要导入的模型的本地文件路径的“FROM”指令。在 Ollama 里创建模型运行模型从Ollama 库下载的大模型可以用prompt 自定义. 例如, 要自定义llama3创建Modelfile# 将参数设置为1[越高越有创意,越低越连贯]# 设置系统信息SYSTEM """""">>> hiHe
Python画笔是一个图像处理函数库,可以用于在Python程序中创建、绘制和操纵图像,实现各种基本的绘图和处理功能。Python画笔库主要包括Pillow、Pygame、OpenCV等。这些库可以处理各种图像格式,如JPEG、PNG、BMP等,同时还提供了许多高级的图像处理工具,方便用户使用。本文由chatgpt生成,文章没有在chatgpt生成的基础上进行任何的修改。以上只是chatgpt能力
所有的投稿都必须经过2-3位同行专家评审,经过严格的审稿之后,最终所有录用的论文将由。“查重+AI检测” 特惠底价,拒绝套路,一年内可用。光学增强现实(AR)与虚拟现实(VR)截稿时间:见官网(早投稿,早录用)激光雷达(LiDAR)与光学雷达。OCT在医学影像中的目标识别应用。增强现实和虚拟现实中的图像处理。光学技术中的机器学习与人工智能。可见光与近红外光谱的目标检测。光学雷达的信号处理与目标识别
本文介绍了如何在星图GPU平台上自动化部署cv_unet_image-matting图像抠图webui二次开发构建by科哥镜像,实现高效、精准的AI抠图。该工具特别擅长处理复杂背景下的发丝抠图,可广泛应用于电商产品图制作、证件照生成等场景,用户通过简单的Web界面即可快速完成专业级图像处理。
TEM神器!Digital Micrograph常用插件下载与安装
高斯滤波是图像处理中常用的一种方法,本文章采用扩充边缘的方法进行高斯滤波,分别生成原图,噪声图,二维高斯滤波的结果,一维高斯滤波的结果(两步),有助于学生理解更深刻的理解到高斯滤波二维模版与分解为一维模版效果相同(因为四舍五入的原因略有差别,但在误差允许范围内)。可以换原图像(要保证图像与.m文件在一个文件夹里)如果有任何可以优化的地方,欢迎评论。#MATLAB#课程实践#图像处理。
在图像处理中我们有时候对图像或者区域进行纠偏,在刚性变换场景中,图像发生的变化是平移和旋转,本文就来介绍根据2个及2个以上目标点的平移来计算如何对图像和区域纠偏,这种方式的好处是你可以不需要知道角度的偏移
以下是对该工具的简单介绍:- weserv/images (wsrv.nl 的源代码)是一个免费且开源的图片处理服务器项目,用户可以在自己的服务器上部署使用- 基于 Linux、nginx 和 libvips 等技术实现其图片处理功能- 只需传入图片 URL 和编辑参数,就可以自动获取、处理、缓存并返回处理后的图片- 提供Docker镜像,支持Docker一键启动- 该工具的开源地址参考:http
本文介绍了如何在星图GPU平台上自动化部署RMBG-2.0 (BiRefNet) 极速智能抠图工具镜像。该平台简化了Docker与CUDA环境的配置流程,用户可快速搭建本地AI抠图服务。该工具能精准处理复杂边缘,适用于电商产品图、人像摄影等场景的快速背景移除,保障图片处理的效率与隐私安全。
本文介绍了如何在星图GPU平台上自动化部署💠 NEURAL MASK | 幻镜·视觉重构实验室镜像,快速搭建本地AI视觉服务。该服务基于RMBG-2.0引擎,能精准处理复杂发丝、透明物体等场景,实现一键智能抠图,适用于电商设计、证件照制作等需要高质量背景移除的视觉重构任务。
本文介绍了如何在星图GPU平台上自动化部署SDMatte镜像,实现跨平台AI抠图功能。该镜像支持Windows WSL2、macOS Metal和Linux CUDA环境,可高效处理电商产品图、人像摄影等专业抠图需求,显著提升图像编辑效率。
图像处理
——图像处理
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 2048 AI社区
2048 AI社区



 AtomGit AI 社区
AtomGit AI 社区


 DAMO开发者矩阵
DAMO开发者矩阵




 HarmonyOS开发者社区
HarmonyOS开发者社区











 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



 AI编程社区
AI编程社区