登录社区云,与社区用户共同成长
邀请您加入社区
上周在处理生产环境的核心服务时,告警群突然炸开了锅。监控大盘显示系统的 P99 响应延迟急剧拉长,不少并发请求直接抛出 Timeout 超时断开。我登录到跳板机,查看服务器的 CPU 和内存占用。令人头疼的是,表面上硬件资源并没有耗尽,但连接数和 Task 队列却在死死地堆积。拉出线上进程的 Thread Dump 和内存 Profiling 日志后,真相水落石出:在高并发流量冲击下,底层线程陷入
高通 QCS8550 的 4nm 八核 Kryo、Adreno 740 光追 GPU、双 eNPU V3 48 TOPS NPU——EC-A8550JD4 把这套旗舰级移动平台做成带工业接口的嵌入式主板,面向机器人、边缘 AI、5G 网关和工业控制。
atomic”同时出现在处理器手册、编程语言、操作系统和并发算法中。它们共享“不可分割”这一核心思想,却不处在同一个抽象层次。在 Arm 体系结构中,atomic 首先描述:一次访问是否会撕裂,一次写以怎样的方式进入多个观察者的视野。编程中的 atomic 则描述:一次 Load、Store、CAS 或加法能否作为一个完整操作参与竞争,编译器和处理器是否共同维持了这种语义。两者不能直接画等号。体系
模型层面量化技术从INT8向INT4甚至INT2演进知识蒸馏成为小模型训练的标准流程NAS(神经架构搜索)自动化设计端侧模型硬件层面NPU成为中低端设备的标配(不止旗舰机)多NPU协同工作需要更好的软件抽象专用AI芯片(如Google TPU、华为昇腾)生态扩张操作系统层面AI成为操作系统的一等公民(First-class Citizen)系统级AI服务(如Android AICore)降低开发门
下面是原理图:下面是SHT11与MCU连接的典型电路:下面是源代码:#include<reg52.h> #include<intrins.h> /******************************************************** 宏定义 *...
1. git clone 提示下载失败要下载onnxruntime 的源码,因为存在大量的submodule,需要使用下载才能进行编译,如果下载失败,可以尝试以下方法,git clone --recursive git@github.com:microsoft/onnxruntime.git解决方案1采用阿里云比本地的网络快好多解决方案2如果下载子模块时,有可能会提示fatal: unable t
Socket 编程的一般步骤:(TCP是有连接通信、UDP 是无连接通信) TCP_Server: socket()->bind()->listen()->accept()->rec()/send()->closesocket() TCP_Client: socket()->connetc()->rec()/send()->closesocket()
传统摄像头正朝着更高帧率、更大分辨率的方向发展,多传感器融合也被行业定义为自动驾驶实现的必经之路,这带来的是越来越大的数据量。多数软件芯片公司还在寻找如何快速准确处理大量数据的最佳方式,而芯仑科技却将精力放在机器视觉的数据之源——前端摄像头。11月28日,芯仑科技创始人兼首席科学家陈守顺教授出席合肥高新区举办2018全球物联网创新峰会,进行了关于...
从工程角度拆解电子皮肤核心组件FSR力敏电阻传感器。涵盖FSR工作原理、核心参数选型、碳基加热膜集成方案、Arduino快速验证代码,以及宝盛达在FSR+碳基加热膜一体化方向的技术实践。
本文主要描述部署过程,防止设备冷启动后初始化1、 NETCFv2.wce5.armv4i.cab,目录:C:\Program Files\Microsoft.NET\SDK\CompactFramework\v3.5\WindowsCE。(注:请根据framework不同版本选择不同的CAB)2、symbol.all.arm.cab,这是SYMBOL的一个安装包,在Symbol提供的软件开...
头疼,先睡一觉。。。
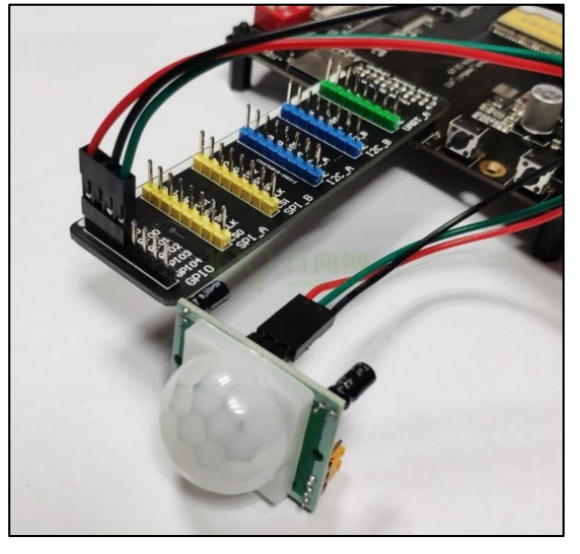
人体都有恒定的体温,一般在 37 度,所以会发出特定波长 10uM 左右的红外线,被动式红外探头就是靠探测人体发射的 10uM 左右的红外线而进行工作的。人体发射的 10uM 左右的红外线通过菲泥尔滤光片增强后聚集到红外感应源上。红外感应源通常采用热释电元件,这种元件在接收到人体红外辐射温度发生变化时就会失去电荷平衡,向外释放电荷,后续电路经检测处理后就能产生报警信号。人体红外模块是一种能够检测人
RK3576 这颗芯片找到了一个很精准的生态位。它不像 RK3588 那样追求全面旗舰,也不像 RV1103 那样只盯 IPC 单品。38mm 的尺寸 + 6 TOPS NPU + 三温级覆盖 + RTLinux + 大模型部署——这套组合拳瞄准的是整个智能硬件的中腰部市场:要小、要稳定、要跑 AI、要能上工业线。如果你是做智能摄像机的产品经理、搞工业边缘控制的硬件工程师、或者正在给小机器人选型主
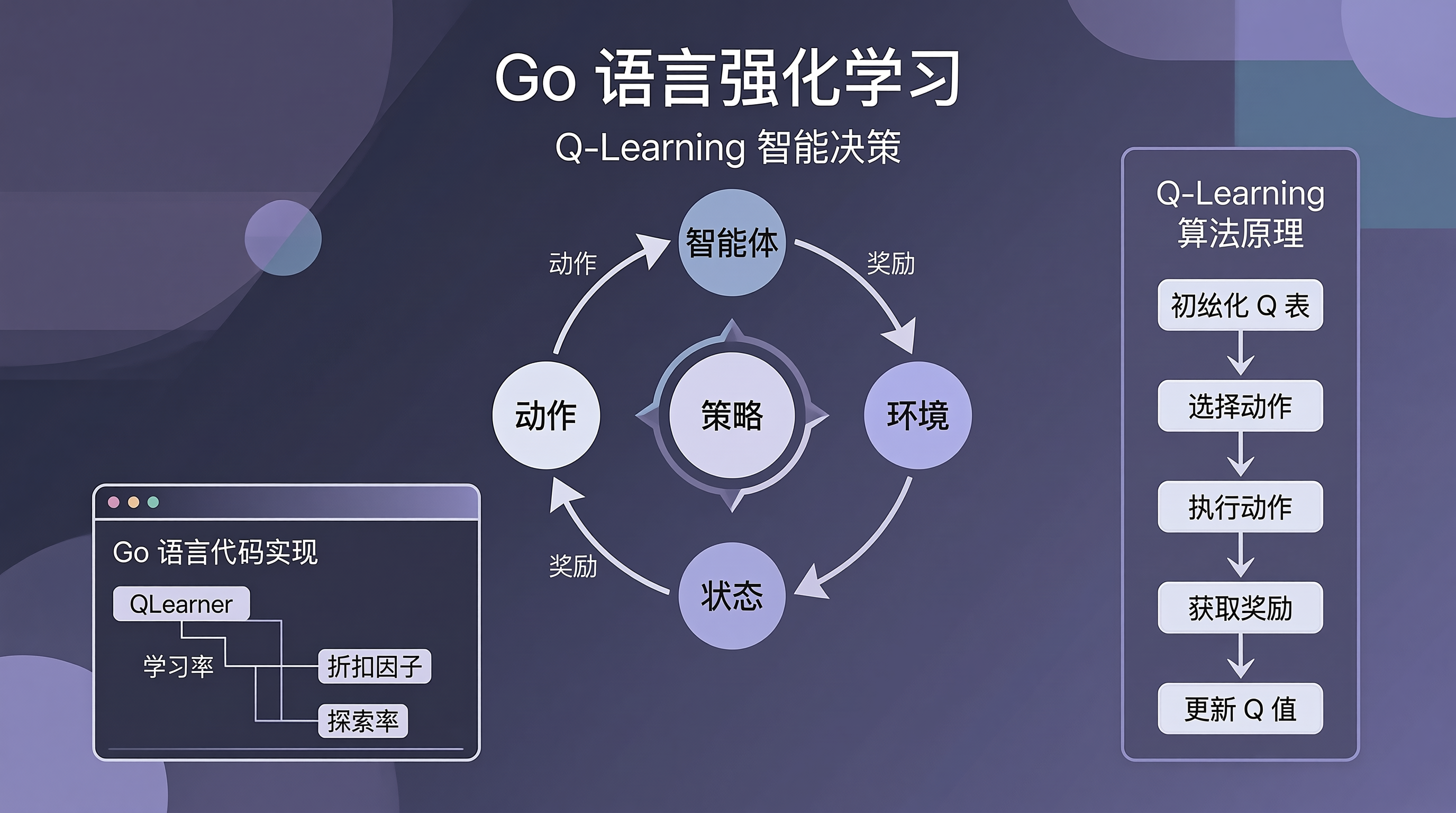
智能体(Agent):执行动作的实体环境(Environment):智能体所处的世界状态(State):环境的当前情况动作(Action):智能体可以执行的操作奖励(Reward):环境对动作的反馈策略(Policy):智能体选择动作的规则Q-Learning:基于值迭代的经典算法SARSA:在线策略学习算法DQN:深度Q网络,结合深度学习与强化学习策略梯度:直接优化策略函数:结合策略梯度和值函数
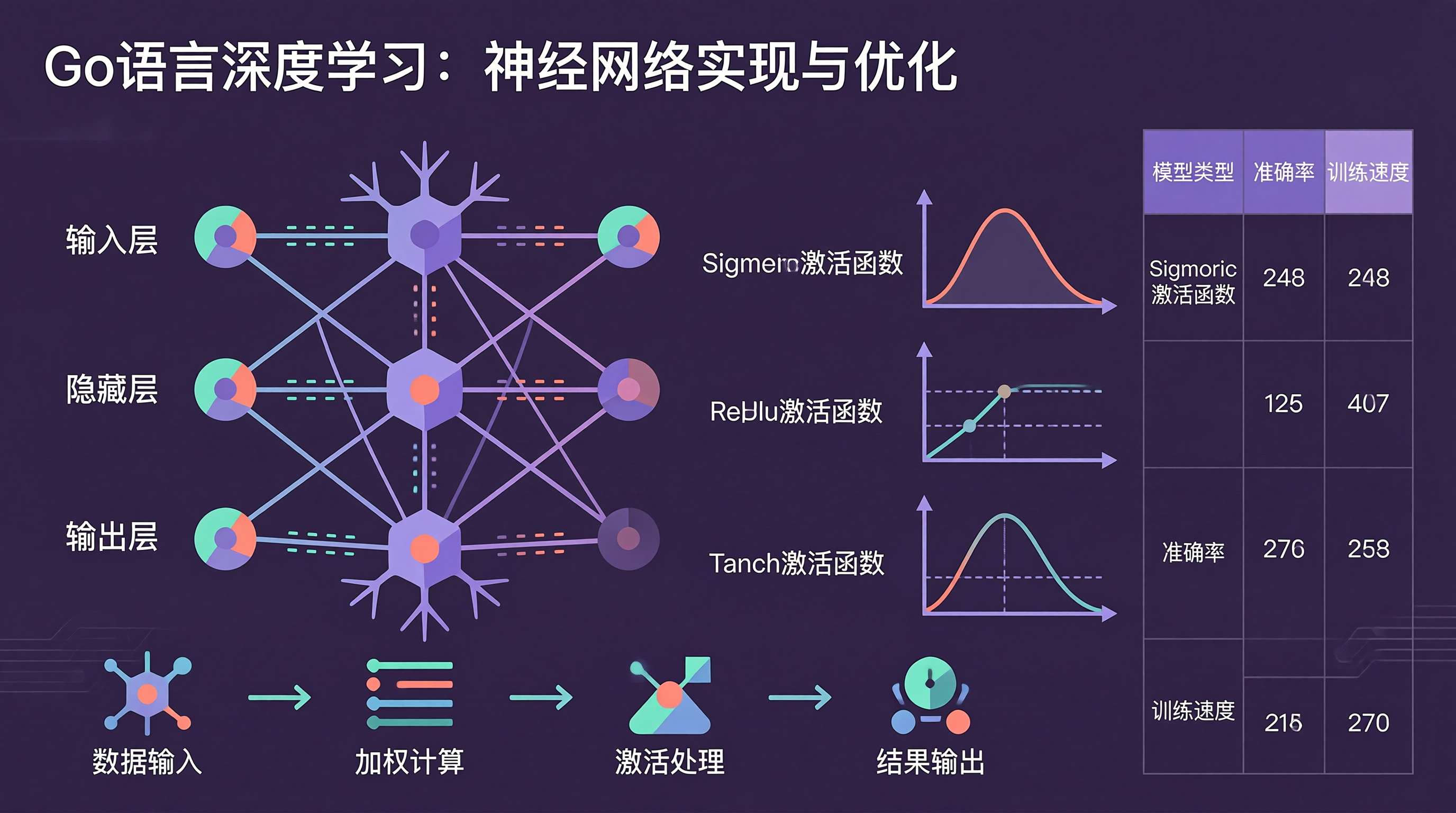
局部感受野:每个神经元只感受输入的局部区域权值共享:同一卷积核在整个输入上共享权重池化层:降低特征图维度,增加平移不变性卷积层:提取局部特征池化层:降低维度,增加平移不变性激活层:引入非线性全连接层:最终分类虽然Go语言在深度学习领域不如Python主流,但它的高性能特性使其成为生产环境部署的理想选择。结合Gorgonia等深度学习库,可以构建更复杂的神经网络模型。下一篇文章将介绍Go语言在自然语
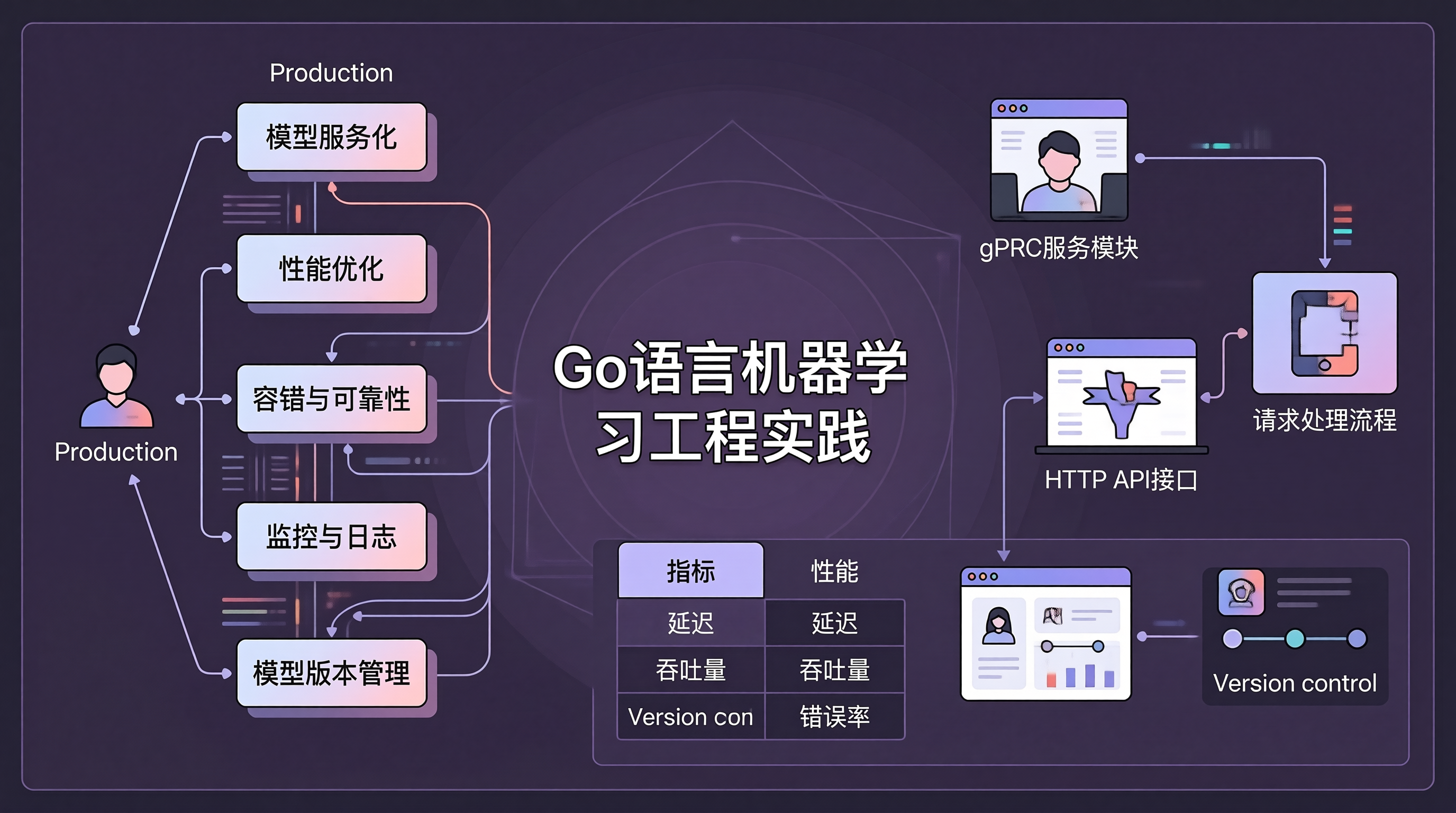
模型服务化:使用gRPC和HTTP提供API服务性能优化:并行化、批量处理、缓存机制容错与可靠性:健康检查、熔断机制监控与日志:Prometheus指标、结构化日志模型版本管理:支持模型更新和回滚容器化部署:Docker和KubernetesGo语言的高性能、并发优势和丰富的标准库使其成为构建生产级AI系统的理想选择。结合Go的编译型语言特性,可以获得更好的性能和部署体验。
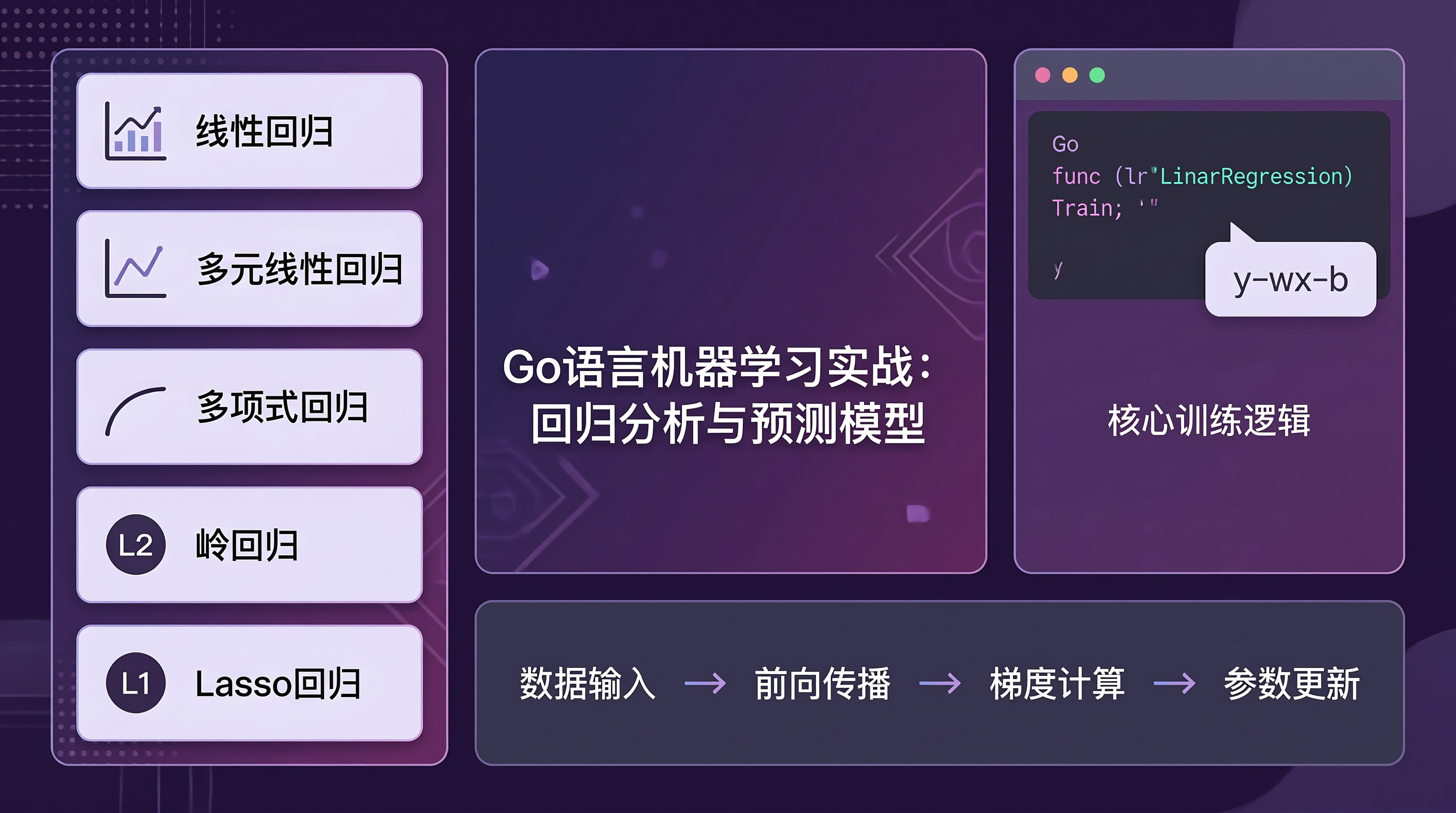
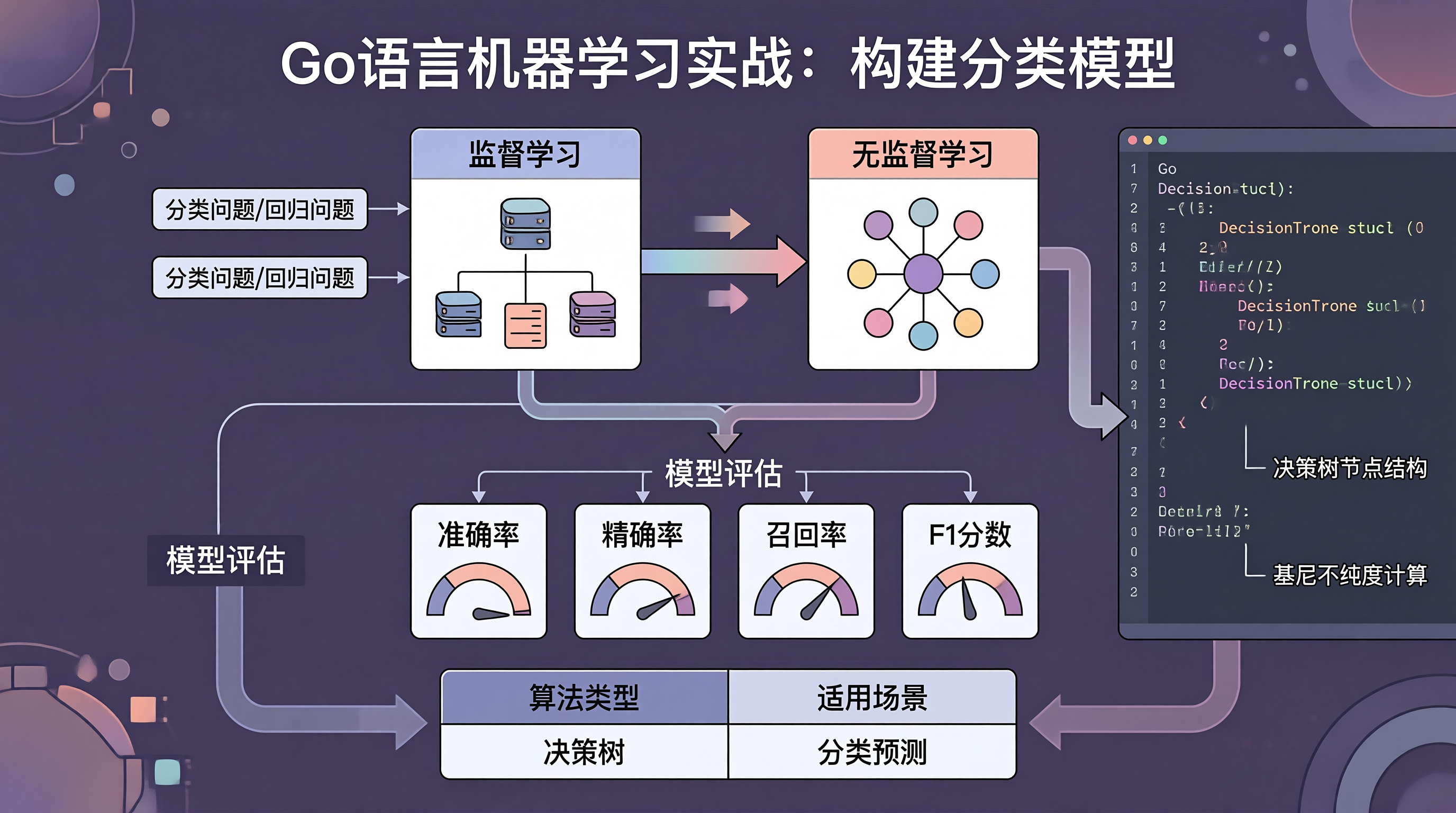
回归分析是统计学和机器学习中的核心技术,用于建立自变量和因变量之间的关系模型。线性回归:最简单的回归模型,假设特征与目标之间存在线性关系多元线性回归:多个特征共同影响目标变量多项式回归:处理非线性关系岭回归:带有L2正则化的线性回归,防止过拟合Lasso回归:带有L1正则化的线性回归,可实现特征选择线性回归的基本原理和Go语言实现多元线性回归处理多特征场景多项式回归处理非线性关系正则化回归(岭回归
决策树:基于基尼不纯度的决策树实现随机森林:集成多个决策树提高准确性支持向量机:基于最大间隔分类的SVM实现K近邻:基于距离的分类算法模型评估:混淆矩阵和评估指标交叉验证:K折交叉验证通过这些实现,你可以使用Go语言构建自己的机器学习模型,充分利用Go的性能优势。
聚类是将数据点分组的过程,使得同一组内的数据点相似度较高,而不同组之间的数据点相似度较低。K-Means:基于距离的划分方法,简单高效层次聚类:构建层次化的聚类树DBSCAN:基于密度的聚类,能发现任意形状的簇高斯混合模型:概率模型,考虑数据的分布K-Means:简单高效,适合大规模数据DBSCAN:基于密度,能发现任意形状的簇层次聚类:构建层次化结构,无需指定K值高斯混合模型:概率模型,考虑数据
神经网络基础:激活函数、前向传播反向传播:误差计算和权重更新卷积神经网络:卷积和池化操作循环神经网络:处理序列数据优化算法:动量、RMSprop、Adam实战项目:MNIST手写数字识别通过这些实现,你可以使用Go语言构建自己的深度学习模型,充分利用Go的性能优势进行高性能计算。
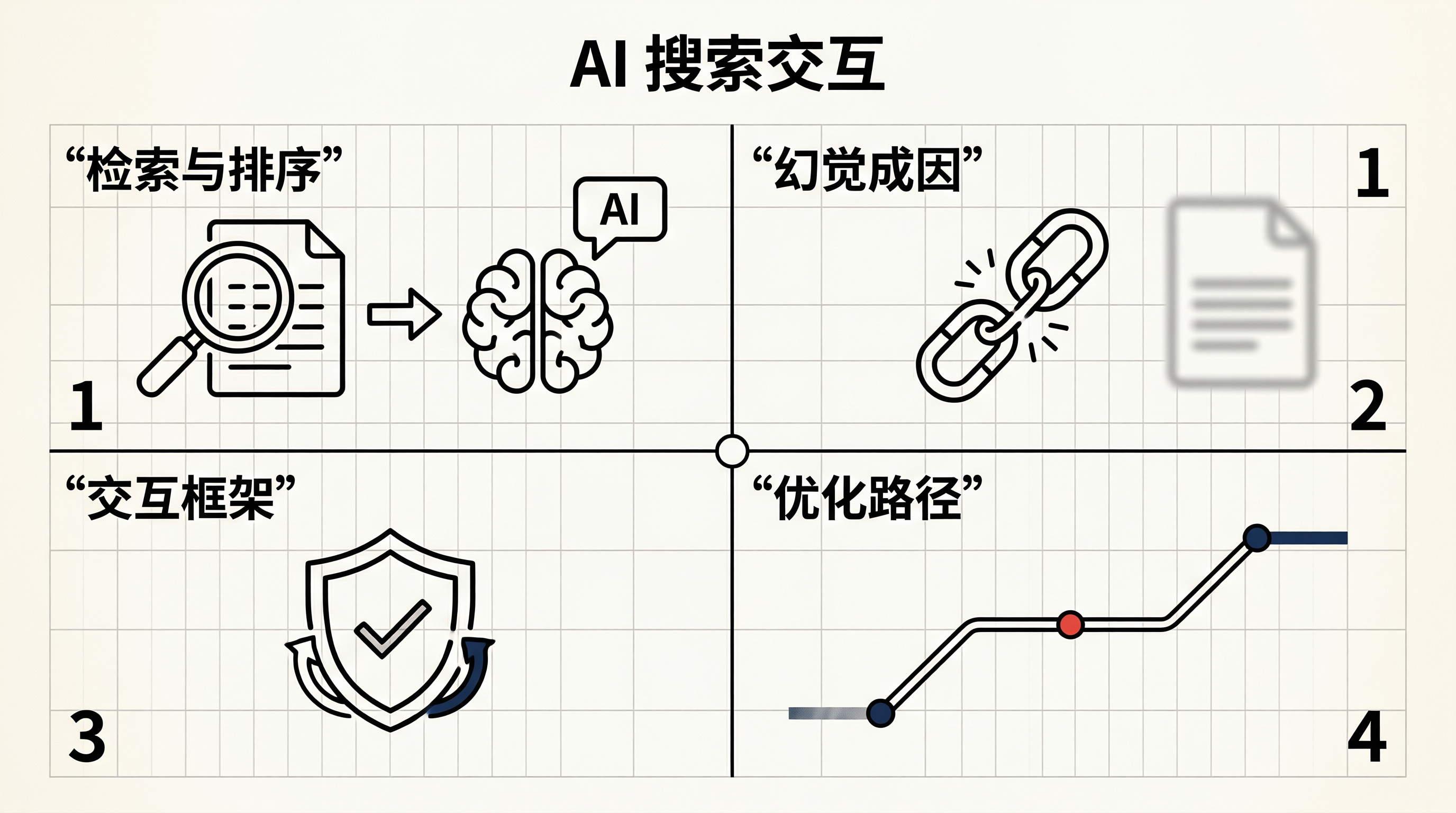
工作也要流程化,交互机制就像是系统中的异常处理中断,它确保了用户在面对不确定性时的体验连续性。在实际应用中,我们需要平衡生成的流畅性与事实的准确性,以实现系统的最佳性能和可靠性。这就是生机所在,通过深入理解和应用 AI 搜索交互设计技术,我们不仅可以构建更高效、更可靠的系统,也可以从中汲取企业管理的智慧,为创业之路增添一份技术的力量。创业是一场长跑,交互机制只是其中的一个环节。但恰恰是这些细节,决
创业是一场长跑,MVP只是其中的一个环节。但恰恰是这些细节,决定了产品从优秀到卓越的跨越。在AI时代,幻觉不是Bug,而是特性。我们无法彻底消灭它,但可以通过产品交互机制将其控制在可接受的范围内。从底层的技术确定性思维,到上层的概率性产品思维,这需要创业者具备跨维度的认知能力。希望今天的分享能给同样在AI创业路上的你一些启发。不要试图用技术的完美去掩盖产品的缺陷,要用设计的智慧去管理技术的风险。这
AI Agent 的能力正从调用单个工具,走向编排多步任务。早期的 Tool Calling 主要让模型调用预设 API;之后,ReAct 和 Plan-and-Execute 把任务拆分和连续执行带进了工程实践。近两年,多 Agent 协作开始用于代码、审查和测试等分工明确的流程,但能否稳定上线仍取决于任务边界和治理方式。每个阶段的跃迁都伴随着核心技术突破。Tool Calling依赖Funct
2026上半年,效率工具的使用方式有了明显变化。ChatGPT仍以对话为主,Cursor开始承担更多编码步骤,Notion AI负责文档辅助,Devina则尝试覆盖完整的编程流程。工具不再只回答问题,也开始接手一段可执行的工作。其一是大模型推理成本的持续下降。GPT-4o级别的推理成本较2024年下降约80%,使得Agent循环中的多次模型调用不再昂贵。其二是Tool Calling协议的标准化。
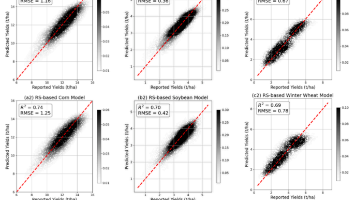
摘要: 斯坦福大学与科迪华团队评估了Google DeepMind的AlphaEarth地理空间基础模型(AEF)在农业下游任务中的表现。AEF通过自监督学习提取64维嵌入向量,提供10米分辨率数据,号称简化遥感预处理。研究对比AEF与传统遥感特征在产量预测、耕作制图等任务中的性能,发现: 本地泛化:AEF与传统方法表现相当,支持“开箱即用”; 尺度迁移:AEF因特征聚合丢失微观信息,性能显著落后
大模型API成本优化的三板斧:Token压缩(系统提示词从3000压缩到800Token、用户输入语义压缩、对话历史智能截断,综合压缩比可达60%80%)、缓存策略(精确缓存+语义缓存双层架构,Redis分布式缓存后端,命中率>60%时成本降低60%)、批处理调度(延迟容忍>5min的请求路由到Batch API,价格降低50%,自动聚合请求每批5001000个),三者叠加在生产环境中可实现70%
大模型推理性能优化的两大核心路径:Prompt Cache解决重复计算问题(跨请求复用KV Cache,Radix Tree管理,命中时延迟降低60%~80%),Speculative Decoding解决串行生成问题(小模型Draft + 大模型批量验证,接受率70%85%时加速比23倍)Prompt Cache的生产级实现要点:Radix Tree组织Cache块、Chunk Size=256
无人机端侧AI避障系统的闭环延迟预算为100ms(10m/s飞行速度下1米移动距离),预算分配为预处理10ms、INT8量化推理12-20ms、深度对齐3ms、NMS后处理5ms、路径规划30-40ms、飞控执行10ms。YOLOv5s从FP32量化到INT8,推理从40ms压缩到12ms(TensorRT加速),精度损失仅影响小目标检测(对避障决策无实质影响),但路径规划预算从10ms增加到40
Linux 风格的终端 AI 代码智能体。极简。
本文探讨了2026年AI产业从数字智能向具身智能转型的核心挑战,提出了三重边界理论:自动化、智能化和具身化的本质区别。文章构建了物理智能体的三层神经回路架构模型(反射层、小脑层、大脑层),分析了不同载体机器人在算力配比与延迟预算上的根本差异。重点讨论了边缘AI在确定性实时约束下运行概率性推理的系统级矛盾,提出了时间触发架构、时限封装等工程解决方案。最后指出具身智能必须解决瓶颈:物理数据匮乏、环境泛
本文解析Lely CANopen中ev_loop的线程模型、任务队列、Future、条件变量与Poll链路,说明ntasks、pstopped、上下文及wait_one流程,并梳理CAN事件由epoll唤醒、任务执行到异步结果完成的全过程。
前提条件:需先编译好boost库,参考我的另外一篇文章嵌入式开发(五):海思Hi3559AV100交叉编译boost1.下载websocketpp下载路径https://github.com/zaphoyd/websocketpp/得到websocketpp-master.zip解压得到websocketpp-master目录2. 编译server进入websocketpp-master/exam
嵌入式
——嵌入式
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区

 DAMO开发者矩阵
DAMO开发者矩阵

 人工智能6S服务平台
人工智能6S服务平台

 深开鸿 技术专区
深开鸿 技术专区




 AI编程社区
AI编程社区



 智能体开发者社区
智能体开发者社区

 AtomGit AI 社区
AtomGit AI 社区




 魔珐星云开发社区
魔珐星云开发社区

 2048 AI社区
2048 AI社区


 乐奇 Rokid 开放社区
乐奇 Rokid 开放社区
