




- @2401_82762455
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
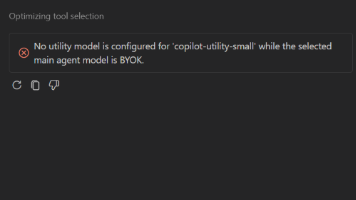
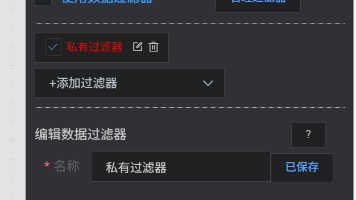
在VS Code中使用ChatGPT小模型时遇到问题,可通过设置解决:进入设置搜索"Chat:UtilitySmallModel",按图二配置即可恢复正常聊天功能。该方案简便易行,无需复杂操作。
在VS Code中使用ChatGPT小模型时遇到问题,可通过设置解决:进入设置搜索"Chat:UtilitySmallModel",按图二配置即可恢复正常聊天功能。该方案简便易行,无需复杂操作。
在VS Code中使用ChatGPT小模型时遇到问题,可通过设置解决:进入设置搜索"Chat:UtilitySmallModel",按图二配置即可恢复正常聊天功能。该方案简便易行,无需复杂操作。
在VS Code中使用ChatGPT小模型时遇到问题,可通过设置解决:进入设置搜索"Chat:UtilitySmallModel",按图二配置即可恢复正常聊天功能。该方案简便易行,无需复杂操作。
指针是 “存储地址的变量”:可以被重新赋值、指向空、参与运算(如指针 ++),灵活性高但风险大,适合需要动态改变指向或直接操作地址的场景(如链表、动态内存管理)。引用是 “变量的别名”:必须初始化且不可更改指向,语法简洁安全,适合单纯的 “间接访问变量” 场景(如函数参数、返回值、简化代码)。简单说,引用是 “受限制的指针”—— 通过牺牲部分灵活性(不能改指向、不能为空),换来了更高的安全性和易用
当前mystring类因为不需要被继承,所以用private隐藏实现、public开放接口就足够,无需protected。如果未来有继承扩展需求,再根据实际场景(需要子类访问哪些内部成员 )决定是否引入protected。
【代码】C++代码解释:利用函数重载计算图形的面积,传入一个参数为圆,两个参数为矩形,三个参数为梯形。
调整一下丝印的位置或者打几个孔,或者改一下板子大小就可以解决,因为这个工程别人已经多次打印过了。以后是嘉立创客服的回复,还不如用上面的方法。
【代码】代码详细注释:在GEC6818开发板上面显示一张德国国旗 DIY机器人工房。
