登录社区云,与社区用户共同成长
邀请您加入社区
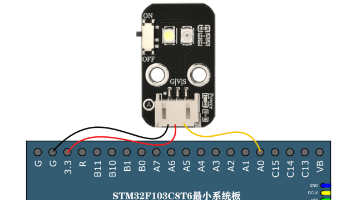
灰度传感器通过结合白色发光二极管和光敏电阻检测不同颜色表面的反射光强度,输出相应模拟信号。该模块可应用于巡线小车或机器人场地识别等场景。实验表明,当传感器接触不同灰度纸张时,通过单片机读取的模拟量数值会随反射光强度变化而改变,验证了其检测功能。模块参数、接线图及实验代码均已提供,测试时需将开关拨至A档位,通过调试工具可观测到不同灰度值对应的输出信号差异。
该器件具有高带宽、低噪音、高稳定性和可重复灵敏度,以及在扩展温度范围(可达+105℃)内的工作能力,特别适合工业应用中的振动监控。低功耗、高性能、还有数字输出和嵌入式数字功能(如FIFO和中断),这些特点非常适合电池供电的工业无线传感器节点。IIS3DWB具有可选的满量程加速度范围(±2/±4/±8/±16 g),并且能够测量带宽最高达6 kHz的加速度项目,输出数据率为26.7 kHz。器件中集
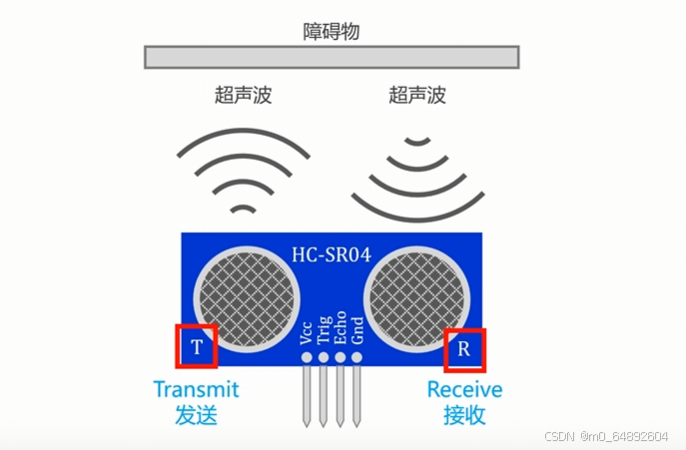
HCSR04超声波传感器Vcc、 Trig(控制端)、 Echo(接收端)、 Gnd 三种控制模式,一般使用第一种GPIO控制,下面我的代码是使用第一种GPIO控制
本文设计了一款基于STM32单片机的风速风向传感器,采用廉价且易获取的传感器模块,结合STM32的强大计算能力,提供准确、实时的风速和风向测量,并通过显示模块将数据呈现给用户。基于STM32的风速风向传感器系统,具有较高的性能和较低的成本,能够实时获取风速和风向数据,并通过显示模块或串口通信传输数据,满足一般气象监测的需求。系统通过计时器捕捉转动的频率,计算出风速值。风向传感器(如风标传感器)会根
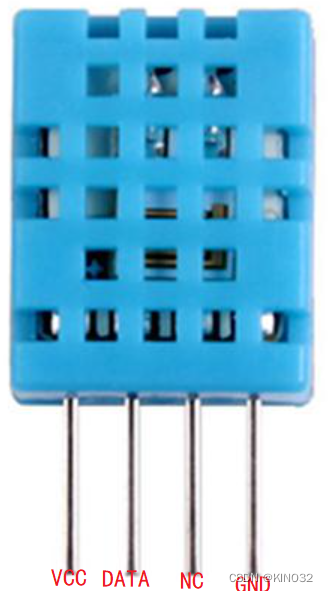
(1)VCC:电源引脚,3.3-5.5V(2)DATA:数据输入输出引脚(3)NC:保留引脚,悬空即可(4)GND:电源地引脚(1)一次完整的数据传输为40bit,高位先传(2)40bit数据介绍:8bit湿度整数数据+8bit湿度小数数据+8bit温度整数数据+8bit温度小数数据+8bit校验数据,前四byte数据值相加之和等于校验值。
BMP280 是一款高精度、低功耗的数字气压传感器,由博世(Bosch)公司生产,广泛应用于各种气象站、无人机、智能家居、移动设备等领域。它不仅可以测量气压,还能通过测量气压的变化来计算出高度,非常适合用于需要高度测量的应用。
随着应用场景的不断拓展,电流传感器已经从单一器件演变为系统设计中的关键节点。国产电流传感器在多个电流区间内,已经形成了较为成熟的实现路径。通过对不同电流等级方案的系统梳理,可以更清晰地理解国产电流传感器在替代 ACS 系列应用中的工程边界与适配方式,这也为后续选型与系统优化提供了参考。
请注意,以上示例代码仅用于说明概念,并未经过完整的调试和测试。您可能需要根据您的具体硬件和传感器类型进行适当的修改和调整。同时,您还需要在STM32的开发环境中设置好串口输出以便查看输出结果。这个例子使用了STM32F4系列的ADC和GPIO模块,通过ADC读取水位传感器的电压值,并计算出水位百分比。代码中的注释给出了相关的解释。希望这个例子对您有所帮助!
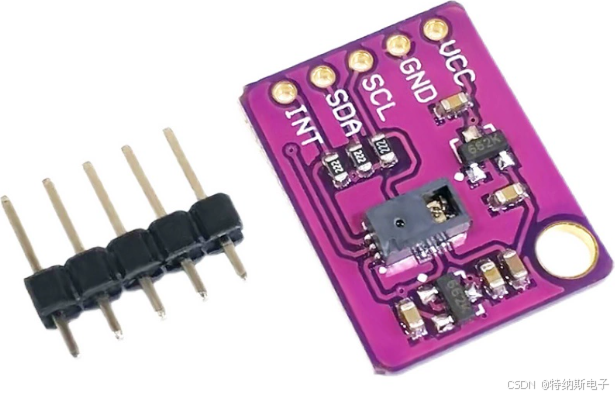
1.VCC:电源正极输入口2.GND:电源负极输入口3.SCL:IIC时钟端口4.SDA:IIC数据端口5.INT:中断输出本产品基于PAJ7620U2手势识别传感器,它可以识别9种不同方向的手势,包括上、下左、右、前、后、顺时针、逆时针、摇摆。手势识别模块使用II2C接口,使用相应arduino库函数即可编程控制,手势识别模块返回的信号可用作为机器人接收的控制信号,从而实现对机器人的控制。内置的
文章目录一、原理1.I2C2.软件I2C3.硬件I2C二、实现1.配置2.代码三、结果四、总结五、参考六、源码githubgitee一、原理1.I2CI2C总线是由Philips公司开发的一种简单、双向二线制同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息。主器件用于启动总线传送数据,并产生时钟以开放传送的器件,此时任何被寻址的器件均被认为是从器件.在总线上主和从、发和收的关系不是
Kithara RealTime Suite将Windows系统转化为硬实时平台,实现μs级中断响应(<10μs),通过独立实时核直接控制硬件。其双系统架构既保留Windows生态,又提供媲美RTOS的性能,支持FPGA协同和多核隔离,显著降低工业自动化、测试测量等领域的开发成本。相比传统方案,Kithara在实时性(≤10μs)、开发生态和硬件兼容性间取得平衡,成为需要微秒级确定性响应场景
STM32CUBEMX + IIC + 光照传感器(JSA1130)案例应用:使用IIC读取光照传感器(JSA1130)的数值,并利用UART打印显示1. 工具IARSTM32CUBEMX开发板STM32F411VET6IIC预备知识见:AT24C02 E2PROM芯片详解2. JSA1130光照传感器2.1.1 JSA1130 器件地址,根据手册ADDR引脚接地, 因此JSA1130器件地址为
1)实验平台:正点原子MiniPro H750开发板4)对正点原子STM32感兴趣的同学可以加群讨论:879133275。
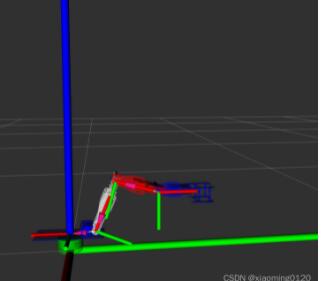
此处θ1 ,θ2, θ3是三个舵机所需转动的角度 ,γ是杆3相对于x轴的夹角,根据刚体旋转,逆运动学求解,会得到两个解,即有两种姿态,相对于前一个杆逆时针旋转的夹角为正,顺时针为负。如上图第一种姿态(上折线),θ1<0,θ2
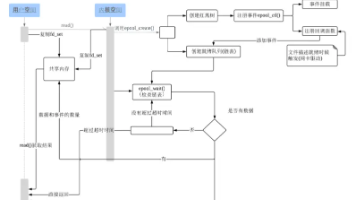
epoll 接口是为解决 Linux 内核处理大量文件描述符而提出的方案。该接口属于 Linux 下多路 I/O 复用接口中 select/poll 的增强。其经常应用于 Linux 下高并发服务型程序,特别是在大量并发连接中只有少部分连接处于活跃下的情况 (通常是这种情况),在该情况下能显著的提高程序的 CPU 利用率。a. epoll 在 Linux 内核中构建了一个文件系统,该文件系统采用红
利用FP寄存器可以得到父函数的栈帧,从栈帧中获取父函数的FP,就可以得到祖父函数的栈帧,以此类推,可以追溯程序调用栈,得到函数间的调用关系。异常接管是操作系统对运行期间发生的异常情况进行处理的一系列动作,例如打印异常发生时异常类型、发生异常时的系统状态、当前函数的调用栈信息、CPU现场信息、任务调用堆栈等信息。当系统发生异常时,系统打印异常函数的栈帧中保存的寄存器内容,以及父函数、祖父函数的栈帧中
stm32
——stm32
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 深开鸿 技术专区
深开鸿 技术专区














 HarmonyOS开发者社区
HarmonyOS开发者社区