登录社区云,与社区用户共同成长
邀请您加入社区
内网穿透,ngrok
找到适用于自己服务器的 arm64 架构的 JDK8 安装包。如果显示 JDK8 的版本信息,则说明安装成功。将下载好的 JDK 压缩包上传到服务器上。
摘要: 本文介绍ARM架构下离线安装Docker Compose的完整流程。步骤包括:1)从GitHub或CSDN下载对应版本;2)准备docker.service配置文件;3)将docker-compose二进制文件复制到/usr/local/bin/并重命名;4)设置文件权限;5)移动服务文件到systemd目录;6)重新加载配置;7)启动Docker服务并设置开机自启;8)通过docker-
基于Jetson orin nano的Ubuntu22.04系统,由于官方不再维护,通常情况下Ubuntu22.04无法安装ROS1。介绍如何在Ubuntu22.04上安装ROS1的教程有很多,但是经过测试,均不能在ARM架构下正常安装。因此考虑到兼容性和后续学习,直接安装ROS2,再通过docker部署ROS1的镜像容器,ROS1和ROS2均可运行,后续也可进行相互通信。话不多说,具体看下面的说
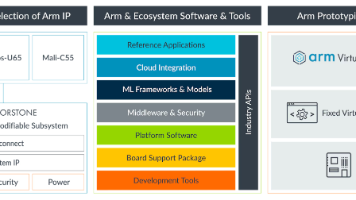
Arm Ethos-U65是一款面向边缘计算的NPU IP核,专为低功耗机器学习推理设计,算力达1TOPS,支持8bit量化TensorFlow Lite模型。硬件架构包含控制单元、DMA控制器、MAC运算单元等模块,采用NHWC/NHCWB16数据格式,支持多种数据精度和卷积/深度卷积等算子。典型应用场景如恩智浦i.MX93处理器,需搭配Cortex-M处理器完成前后处理。该IP通过Vela编译
pip install sip成功还是提示找不到,应该是没有设置环境变量,搜了一下,sip可执行文件在~/miniforge3/envs/mypython3.8.20/bin目录下,只有sip-buildsip-install这些没有可执行文件sip。编译过程中又出错了,但是没有提示,又用sip-install --verbose命令再次编译,给出了错误,应该是缺少opengl库,也不知道PyQt
本文深入解析C++内存重排序机制,从单线程到多线程环境。第一章剖析重排序本质,展示编译器、CPU和内存系统三个层次的优化手段,强调as-if-serial语义对单线程程序的保护作用。第二章分类讨论数据依赖与控制依赖,通过代码示例说明RAW等四种依赖关系,并解释CPU如何通过寄存器重命名优化伪依赖。文章还揭示控制依赖的微妙性及现代CPU的投机执行机制。全文通过丰富案例和表格对比,系统阐述了重排序这一
最近,知乎上一个热帖引发了技术圈的集体共鸣:《从抢着装到花 199 元请人删,为啥第一批「养虾人」已经开始卸载龙虾了?就在几个月前,OpenClaw(龙虾)凭借其强大的自动化调度能力火遍全网。无数人抱着“自建数字员工”的幻想,冲进各种教程。甚至很多连平时都不怎么会折腾电脑的人都争前恐后地花钱来请人给自己安装OpenClaw(龙虾),生怕自己和这次ai的浪潮失之交臂。但很快,这股热潮就变成了哀鸿遍野
由于默认的镜像源中没有arm索引,先备份source.list后配置arm索引。1、安装wsl ubuntu22.04 Extensions。2、在wsl中安装打包工具。
虚拟机:Parallels Desktop(Vmware虚拟机应该类似)电脑:M2max芯片 Macbook Pro 32G+1Tb。麒麟系统版本:银河麒麟桌面操作系统V10-鲲鹏版(Arm)系统版本:MacOS 26.5.2 (25F84)使用Finalshell连接银河麒麟。
第三篇:手把手教你移植任天堂,没有声音、无需外置SD卡、可使用独立按键也可使用外置手柄,本人使用的芯片为ESP32,移植到STM32均可使用。(本篇主要介绍ppu.c文件,即教你如何移植屏幕)
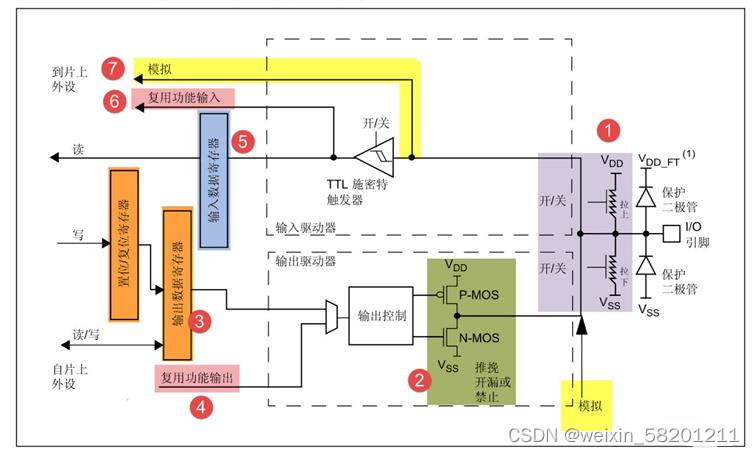
学习STM32F103系列芯片的地址映射和寄存器映射原理,GPIO端口的初始化设置
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档基于STM32F103芯片实现LED灯闪烁前言一,二、使用步骤1.引入库2.读入数据总结前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言stm32f103c8t6最小核心学习板包含了以下成分:1.四方扁平封装的主要MCU – STM32F103C8T6。2.重置开关–重置微控制器。3.microUSB端口–用于串
Intel不使用RISC的原因:指令集的向前兼容Intel在CISC和RISC融合上做的努力:微指令架构—>译码器电路更复杂+译码时间增加—>引入L0缓冲器(减少频繁译码的工作)未来的趋势:开源CPU RISC-VARM(Advanced RISC Machines)在移动端称霸的原因(并非RISC架构):1、功耗优先的设计(功耗低);2、价格低。Intel CPU(电脑端):使用CISC架构AR
本文主要介绍STM32F103系列芯片的地址映射和寄存器映射原理,以及分析GPIO端口的初始化设置(时钟配置、输入输出模式设置、最大速率设置)
本文主要利用STM32F103完成对SD卡的数据读取,下面介绍实验的详细操作要求:掌握SD卡协议原理,用STM32F103完成对SD卡的数据读取(fat文件模式)。这里写目录标题要求:掌握SD卡协议原理,用STM32F103完成对SD卡的数据读取(fat文件模式)。一、SD卡协议原理1、SD卡简述2、SD卡物理结构3、SD卡寄存器SD卡总共有8个寄存器,用于设定或表示SD卡信息。4、SD卡操作模式
1 前言1.1 概述BCM2835 具有以下可以被 ARM 安全使用的外设:定时器中断控制器GPIOUSBPCM/I2SDMAI2C 主机I2C/SPI 从机SPI0,SPI1,SPI2PWMUART0,UART1本数据手册旨在对这些外设的细节进行描述,以方便开发者对该芯片移植操作系统。有一些被 GPU 控制的外设将不会出现在本数据手册。不推荐从 ARM 访问这些外设。1.2
sqlcipher是一个对sqlite数据库进行aes256加密的开源库,其强大的跨平台性让它被许多知名企业使用,例如三星、摩托罗拉、苹果等等,从ios2-ios6苹果一直采用sqlcipher,安卓平台可以支持os2.x-os4.4.项目本身不提供加密算法,调用openssl的aes加密算法,其官方称只要能使用sqlite、有openssl库的平台都可使用sqlcipher。一、ubunt
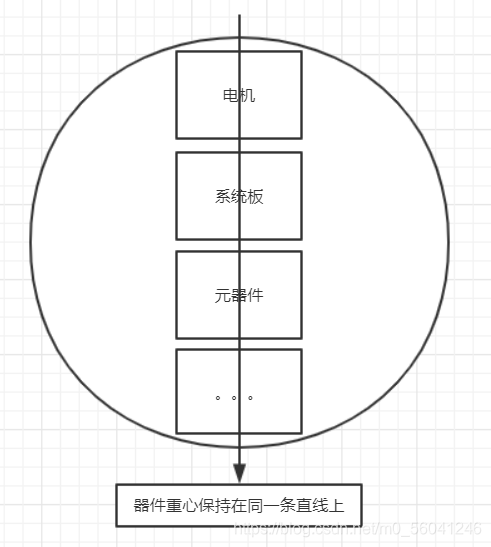
随着2021年电赛的临近和清单的出炉,各参赛队伍都在紧张的备赛当中。然而在电赛清单中,我们能看到一个比较特别的器件--空心透明球。这个器件的特别之处在于它的吃尺寸过大,以至于让人摸不着头脑。在网上看过很多预测,关于这个球的预测大家也是众说纷纭。那么现在就根据预测的最多的一种情况--球形机器人,来进行简单的设计方案分析。准备材料三个直流电机,一个舵机,飞轮一片,空心透明亚克力球(直径在20~30cm
1.首先安装vm直接继续继续安装即可。工具在下面的网盘里2.下载centos7 arm镜像链接: https://pan.baidu.com/s/154fEpWEmKmgzl3_AHiNn6w 提取码: 063k3.安装过程3.1 打开vm,把下载好的镜像拖进去3.2 选择 other 64-bit arm3.3 这些都是默认,下一步即可3.4 先关机,在配置找到设置这里内存和 硬盘配置1024m
首先将USB摄像头插入到香橙派的USB接口中然后通过lsmod命令可以看到内核自动加载了下面的模块3.安装fswebcam安装完fswebcam后可以使用下面的命令来拍照-d选项用于指定 USB 摄像头的设备节点用于去除照片的水印-r选项用于指定照片的分辨率-S选项用设置于跳过前面的帧数用于设置生成的照片的名字和路径拍完照后可以将拍好的图片传到电脑上观看。注意:在执行程序前需要在执行文件的路径先保
开发笔记
目录一、cube的相关配置二、代码移植1. 下载源代码2.移植文件3.代码修改一、cube的相关配置打开cube软件,选择stm32f103c8tx芯片,点击Start....进入配置页面首先展示一下接下来将要配置的硬件本次配置将要使用的引脚点击FATFS勾选User-defined点击SYS,DeBug改为Serial Wire配置PA4引脚在芯片上将PA4引脚选为Output在点击GPIO,将
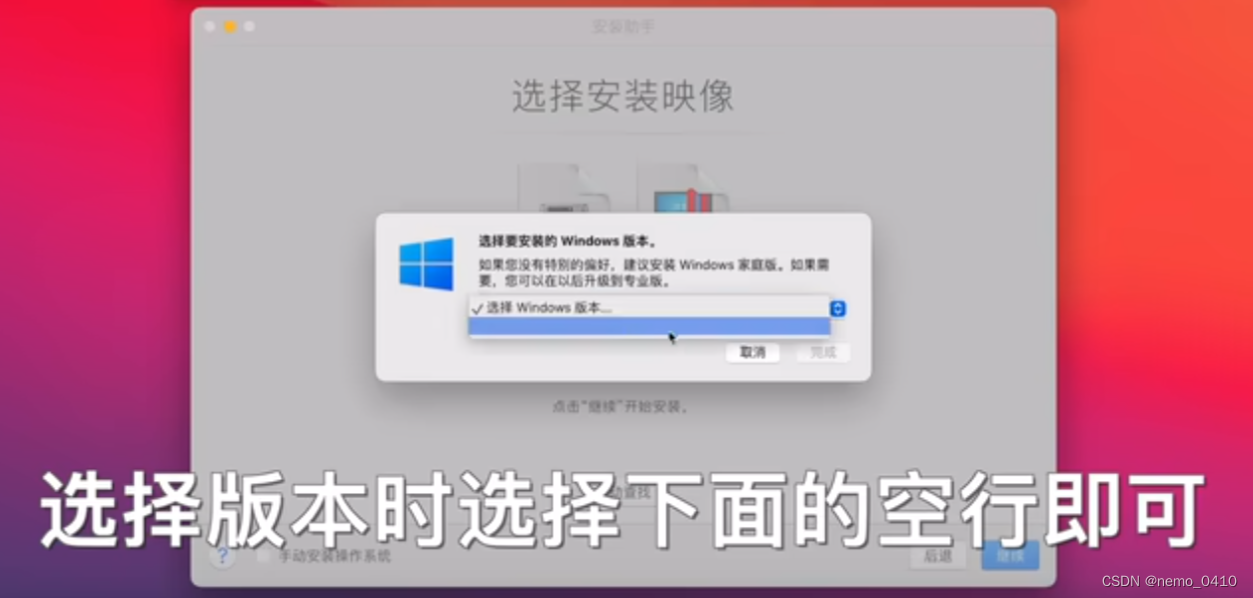
这个upM1芯片Macbook如何下载ARM版Windows10镜像在官网直接找到了Arm的Windows10,他是21年发的,现在找不到了,但官网找东西是基操,这是方法,记录下来M3的macOS真的快,网速、传输、安装速度都快的离谱小结一下:PD19 → win10 arm → office word&visioPD19(官网试用,也有友好交流版,这次没测试)win10 arm (用的是up直接
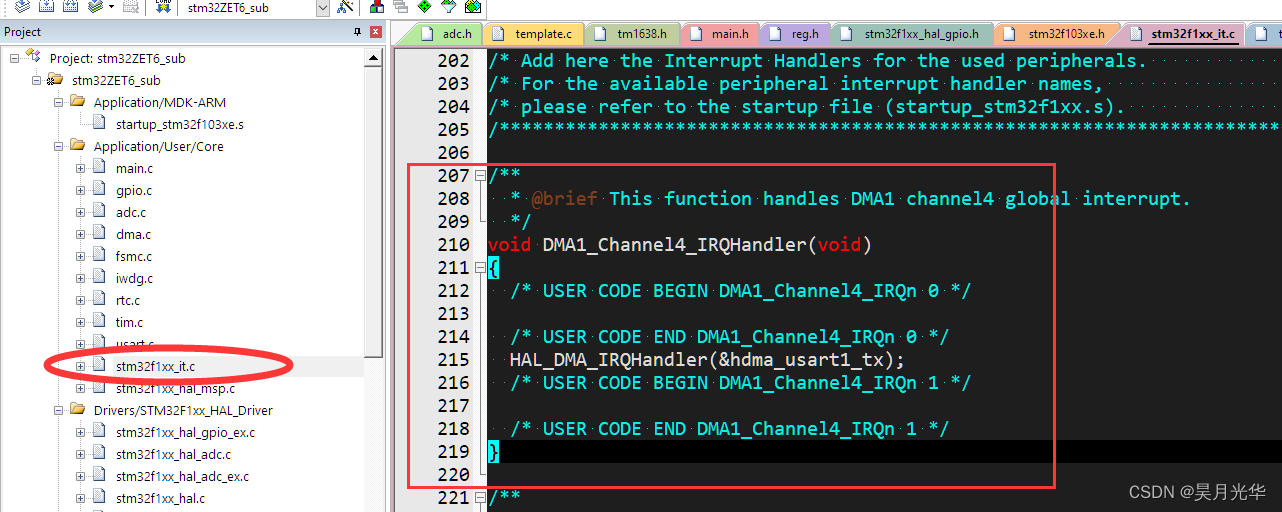
在CUBEMX配置时,默认是把DMA的中断打开的,无论是adc的dma还是串口,它们的完成中断都是打开的,为了避免不必要的进入中断,一般我把ADC的DMA中断关闭,把串口的以DMA接受数据的中断也关闭.为什么使用DMA,DMA可以为外设和内存提供一条数据通道,使得数据的复制不需要CPU去参与,减低CPU的负担,在实时性的工作时显得格外重要。在这里,DMA接受数据的DMA中断关闭,发送数据的DMA中
序号主控型号CPU最大编码能力Sensor接入通道内置DDRNPUPIN脚芯片封装对标海思型号1SSC336DARM A7双核@1GHZ3MP@30fps1128MB0.5T对PINQFN-128/12.3*12.3mm3516CV5002SSC336QARM A7双核@1GHZ3MP@30fps1
arm
——arm
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI编程社区
AI编程社区



 全球具身智能开发者社区
全球具身智能开发者社区

 openvela
openvela
 AI Agent技术社区
AI Agent技术社区



 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区

 openEuler 社区
openEuler 社区


 DAMO开发者矩阵
DAMO开发者矩阵