




- @m0_62923342
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
VLA(视觉-语言-动作)模型正在重塑智能驾驶技术。它通过将视觉感知、语言理解和动作控制融为一体,赋予车辆类似人类的逻辑推理能力,使其不仅能"看见"还能"理解"路况。相比传统模块化方案,VLA让车辆具备常识判断,能应对突发情况。小鹏第二代VLA更创新性地取消了中间语言转换环节,实现更快的"直觉驾驶"。虽然目前还存在VLA与世界模型的技术路
大语言模型(LLM)是一种基于海量文本训练的"超级学徒",通过分析词语关联来生成内容。它能完成写作辅助、代码生成、智能客服等多种任务,但存在"幻觉"(编造事实)、知识滞后等局限。未来LLM将向多模态、实时更新和自主行动方向发展,成为人类处理信息的强大工具而非替代者。理解其工作原理和局限,才能更好地利用这一技术提升效率。
2025年图灵奖颁给了强化学习奠基者萨顿和巴托,这项技术已成为AI发展的核心驱动力。强化学习通过"试错反馈"机制让智能体自主学习,不同于监督学习和无监督学习,它擅长处理序列决策问题。从AlphaGo到ChatGPT,深度强化学习已实现突破性应用,并在2025年广泛应用于智能制造、芯片设计、自动驾驶等领域。这项技术不仅改变AI发展路径,更提供了一套关于长期决策的哲学思考,代表着实
matlab 文件操作常用的命令copyfile/movefile/delete等命令是常用的命令,下面就详细介绍下。test.txt文件目的路径:D:\REPOSITORY\haomo-gitlab\test1.txt。copyfile命令可以将文件或文件夹,从一个地方拷贝到另一个地方。test.txt文件源路径:D:\REPOSITORY\test.txt。1)把一个文件从一个路径,拷贝到另外

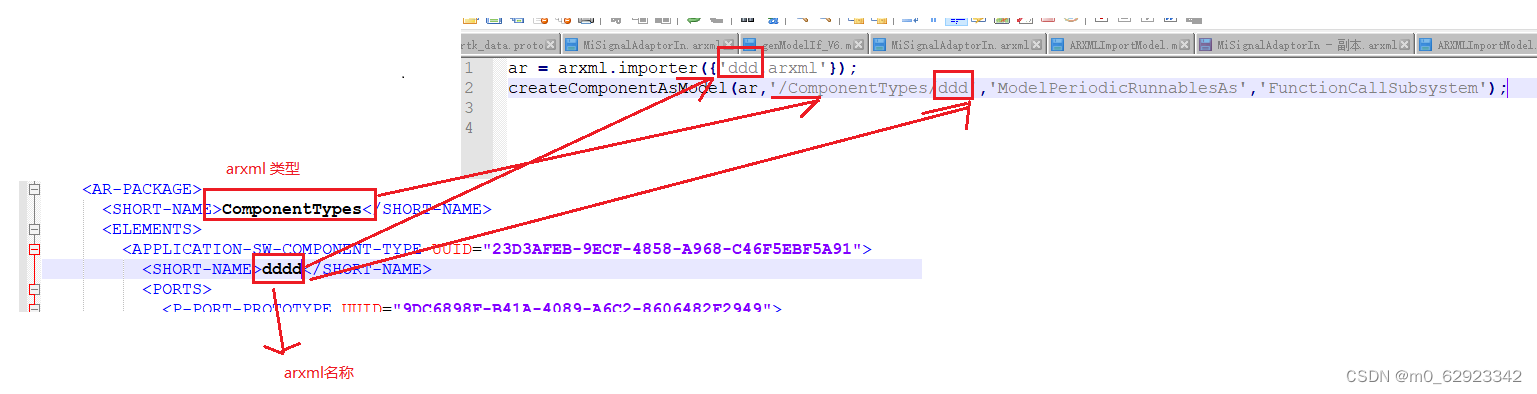
文章摘要: 本文介绍了使用arxml.importer工具导入arxml文件并创建组件的操作步骤:1)准备ddd.arxml文件;2)执行导入命令创建模型,其中arxml.importer({'ddd.arxml'})用于导入文件,createComponentAsModel函数用于创建组件模型;3)说明了命令参数与arxml文件的对应关系,包括组件路径、模型类型等关键参数的设置方法。该流程适用于
摘要:本文介绍了Matlab中结构体数组的定义与使用方法。结构体数组由多个具有相同字段结构的元素组成,适合存储结构化数据(如NOH辅助驾驶参数)。文章详细讲解三种定义方法:1)逐个元素赋值(基础方法);2)预分配数组后赋值(推荐大数据量使用);3)struct函数批量创建(适合批量数据)。关键点包括:字段访问语法(数组名(索引).字段名)、预分配内存的重要性、以及批量提取数据的技巧([数组名.字段
人工智能的发展,就像一趟不断加速的列车-8。从当年被嘲笑“比马车还慢”,到如今呼啸着把我们带入一个全新的时代。作为普通人,我们该如何面对?也许不必焦虑。正如上海交大高晓沨教授所说,AI再厉害,也替代不了人类的“主动输出”-7。它能帮你收集资料、优化方案,但最后的创造性决策、对复杂人性的洞察,依然掌握在我们自己手中。在这个AI时代,最核心的能力,或许就是使用AI的能力。不妨从今天开始,打开电脑,装上
FOTA技术正重塑智能汽车体验,通过远程升级实现车辆性能持续进化。与传统SOTA(软件升级)不同,FOTA能改写动力、刹车等底层系统,实现加速性能提升、电池管理优化等功能。其核心技术架构包含云端管理、差分压缩传输和车端安全验证机制,采用A/B分区、数字签名等技术确保升级安全。典型案例包括特斯拉通过固件升级将Model 3加速时间缩短0.5秒,以及国产电动车优化低温充电策略。随着中央计算架构发展,F
智能驾驶系统主要由感知层、决策层、执行层和支撑系统四大部分组成。感知层通过摄像头、雷达等传感器收集环境数据;决策层利用AI算法进行路径规划和决策;执行层通过线控系统实现车辆操控;支撑系统包括高算力平台、V2X通信等技术保障。各系统协同工作,推动自动驾驶技术向更安全、高效的方向发展。随着技术进步,无人驾驶时代正加速到来。
智能驾驶摄像头选型需要综合考虑功能需求与性能参数。不同位置摄像头各有特定要求,如分辨率、动态范围、低照度性能等核心参数直接决定成像质量。视场角需平衡探测距离与覆盖范围,帧率需匹配车速需求。环境适应性测试包括极端温度、防水防污和振动耐久性。数据接口和时间同步精度影响系统性能,而集成ISP和边缘AI可提升处理效率。最后需通过车规认证确保量产可靠性。工程师需在各项参数间找到最优平衡,才能打造真正可靠的&