- @2501_90884015
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
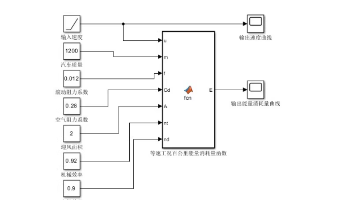
基于matlab的汽车性能建模仿真模型以及代码汽车驱动力-行驶阻力平衡图的汽车动力性仿真模型、汽车动力特性图的汽车动力性仿真模型、汽车功率平衡图的汽车动力性仿真模型、
四旋翼无人机仿真matlab/simulink仿真四旋翼自抗扰 姿态控制仿真模型 ADRC模型对比PID轨迹跟踪

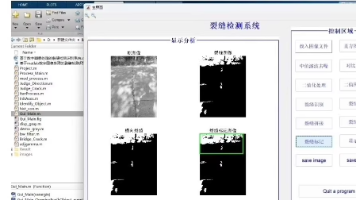
基于matlab数字图像处理的裂缝检测识别系统图像直方图均衡,中值滤波去噪,二值化等操作,对裂缝的识别拼接与检测标记,并对检测的图像与参数进行保存有代码+有报告
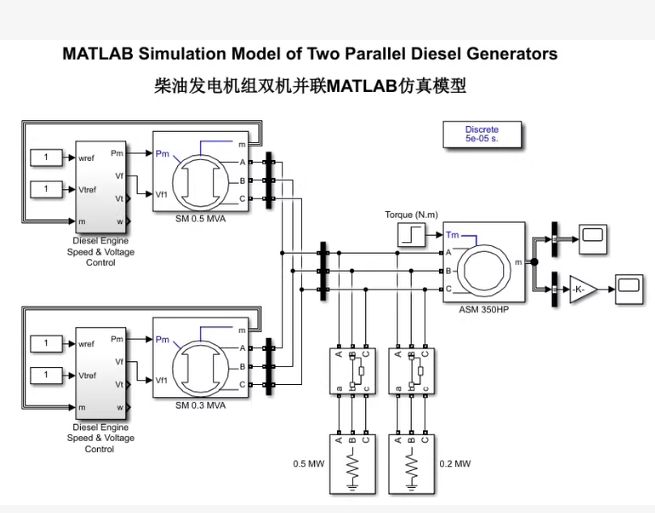
柴油发电机仿真 Matlab Simulink 柴油发电机matlab仿真 微电网仿真 柴油发电仿真 风光柴储微电网 光伏发电 柴油发电 风力发电 储能电池 光柴储微电网 风柴储微电网 风机光伏柴油储能微电网
老男孩92期Linux云运维工程师课程,配套VMware、Xshell工具。内容包括Linux初级到高级、ES、Docker、K8S、Prometheus、Ceph等完整课程

老男孩92期Linux云运维工程师课程,视频无水印,资料无密码,还送配套VMware、Xshell工具。内容包括Linux初级到高级
Java+SpringBoot的校园餐厅在线点餐管理系统

DeepSeekai文游指令300➕最新最全古代、哨向、现代、西幻、诡异、修仙、系统穿越、末日生存、复仇重生、现代校园、后宫宅斗、斗罗大陆、
使用了PyQt5作为图形用户界面(GUI)框架,结合TensorFlow和MobileNetV2进行图像识别。基于MobileNetV2深度模型,支持20种猫科、38种犬科分类,准确率超95%。输出结果包括识别的动物类型(猫/狗/其他)、品种标签和置信度,帮助用户了解模型的预测结果及其准确性。该项目不仅是一个实用的人工智能应用,也是一个非常适合初学者深入理解深度学习、图像处理和部署流程的综合性项目
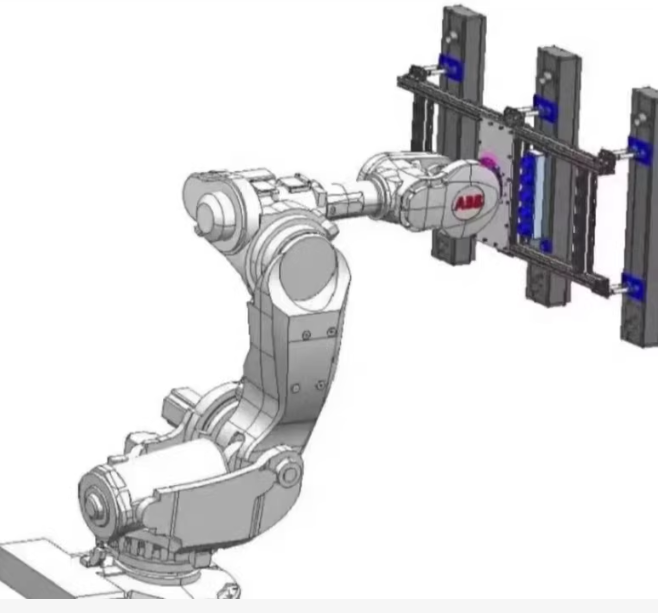
ros机械臂 机械臂机器人仿真建模,机械臂matlab,机器人仿真、ros机器人,ROS无人机,auv控制。机械臂、多杆机械臂、机械臂轨迹规划、多机器人协同、工业机器人、车辆控制器matlab、simulink动力学控制、自适应控制算法、手眼标定。AUBO机械臂开发ROS虚拟机仿真环境机械臂 机器人仿真 正运动学,逆运动学机器人工具箱。焊接机器人等六自由度建模能够根据你的模型定制DH参数并且进行相