- @Godspeed_zwh
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
事件相机技术发展与应用挑战分析 事件相机技术近年来在分辨率(128×128提升至1280×720)和动态范围(120dB)方面取得进展,但面临三大核心挑战: 数据瓶颈:高分辨率传感器在高速场景下产生GB级/秒的数据流,反而可能因噪声和重影降低性能; 算法适配:传统二进制脉冲数据与机器学习框架不兼容,需开发新型混合表示方法(如事件帧、动态图网络); 硬件生态:现有GPU架构与事件流稀疏性不匹配,专用
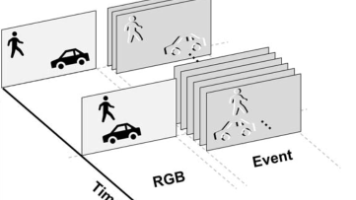
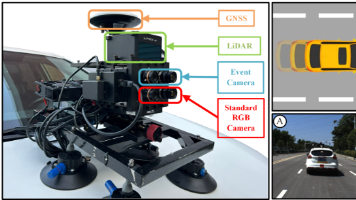
事件相机是仿生机器视觉的革命性突破,通过异步像素独立触发机制,仅捕捉亮度变化事件(x,y,t,p),实现微秒级响应、120dB高动态范围和零静态功耗。相比传统相机,它在高速运动、极端光照下优势显著,适用于机器人快速反应、高速SLAM等场景。但面临无色彩信息、算法适配难、成本高等挑战。目前Prophesee等厂商正推动技术发展,事件相机将成为机器人视觉在极限场景下的"特种装备",
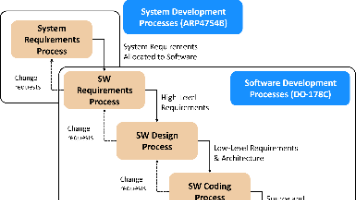
智能汽车领域的深度学习技术(如端到端大模型、强化学习路径规划)面临航空适航标准DO-178C的根本冲突。DO-178C要求代码具备确定性和100%可追溯性,而神经网络的非线性黑盒特性无法满足这一要求。AI算法在eVTOL自主飞行中的应用面临三大挑战:显式逻辑与黑盒概率的对立、双向追溯链断裂、长尾效应风险。解决方案是将AI降级为DALC级感知模块,并设置DALA级确定性安全监视器进行指令验证。最终结
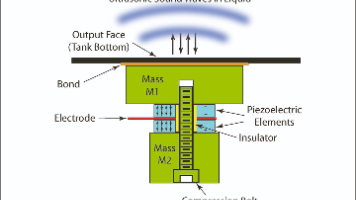
本文介绍了超声波雷达中常用的两种换能器:压电式和磁致伸缩式。压电式换能器利用压电效应实现声电转换,具有结构简单、频率高的特点;磁致伸缩式则通过磁场变化产生机械振动,适合大功率应用。文章对比了二者的性能差异,并指出车载超声波雷达主要采用压电式换能器。此外还介绍了换能器的关键技术指标,为超声波传感器的选型和应用提供了参考依据。
摘要: eVTOL(如复合翼/倾转旋翼构型)的全包线控制面临多模态动力学挑战,需跨越悬停、过渡和巡航三种物理状态。其核心难点包括:1)三维时变流场建模,需耦合旋翼下洗流与机翼气动干涉,尤其在过渡模态存在非线性控制分配;2)姿态解算需采用四元数消除欧拉角的天顶奇异性,避免大机动下的姿态崩溃;3)控制律切换陷阱(如配平突变、增益裕度骤降)需通过状态流硬互监、双向动态权重衰减等航空级防错架构,确保模态转

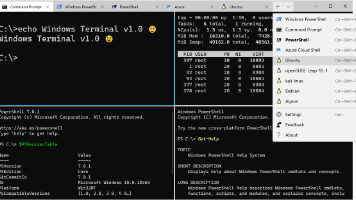
本文系统梳理了终端(Terminal)的发展历程与技术架构。从1960年代的物理终端设备(如VT-100)及其定义的ANSI转义序列标准开始,到DOS时代的命令行界面,再到现代基于PTY/TTY机制的虚拟终端模拟器。重点解析了VSCode集成终端的实现原理:通过xterm.js渲染引擎和node-pty库创建伪终端,实现多终端管理、任务集成等开发场景。终端作为人机交互的核心界面,其CLI的灵活性、
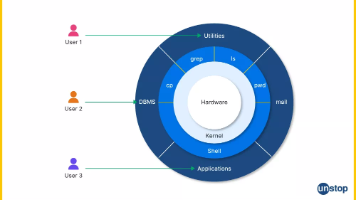
简单来说,Linux Shell 是一个程序,它为你提供了一个命令行界面(CLI)。它处于用户和 Linux 操作系统内核(Kernel)之间,充当一个“翻译官”或“解释器”。接收你在终端中输入的文本命令。解释这些命令的含义。将解释后的指令传递给操作系统内核去执行。将内核执行的结果(不论是成功还是错误)传回给你,显示在终端窗口上。没有 Shell,普通用户几乎无法直接操作复杂的内核。它是一个强大且
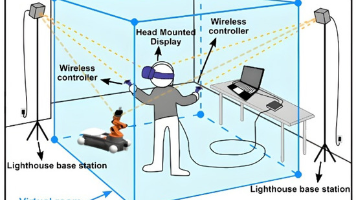
无线技术推动具身智能革命,迈向"无线的傀儡"时代 具身智能(如人形机器人)的无线化趋势正从基础联网向**"去除线束"和"实时控制"**演进。机器人关节和传感器数量激增,有线连接导致线束复杂、易损且笨重。无线技术分为三层应用: 神经层(L1):替代体内线束,需超低时延(<100μs)和高可靠性,如星闪(20μs延迟)用于关节控制,无线
麦克风阵列在人形机器人上的主流安装位置为头顶和胸口。头顶采用环形阵列(6+1或4麦),优势在于360°无遮挡拾音、精准声源定位和低噪音干扰,但垂直角度感知较弱;胸口采用线性阵列(2-4麦),适合前方增强拾音且结构紧凑,但存在后方盲区和噪音干扰问题。特殊分散式布局因算法复杂极少使用。头顶方案适合全向交互场景,胸口方案则适用于定向服务需求。
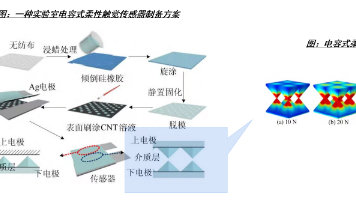
摘要: 阵列式触觉传感器(TactileArray/E-Skin)是具身智能核心零部件,国产化率低、技术壁垒高,处于实验室向商业量产过渡阶段。国际巨头主导高端市场(如Tekscan、PPS),国内企业(能斯达、钛深科技等)在压阻式、电容式路线上加速突破。核心技术瓶颈包括材料一致性、高密度布线、量产工艺等。未来趋势聚焦多模态融合、存算一体及电子皮肤大面积化,预计3-5年内随人形机器人需求爆发,国产供