- @2501_90824910
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
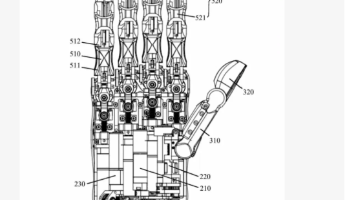
人形机器人灵巧手专利全套合集,学习研究很值得。内容包括:- 机器人结构,驱动,传感,传动等专利研究文件-
高考志愿填报管理系统|java|springboot |vue|前后端分离|web网站|万字文档|带部署教程视频|商品包含:前后端源码+详细文档+部署教学视频+环境视频配置教程+环境安装包
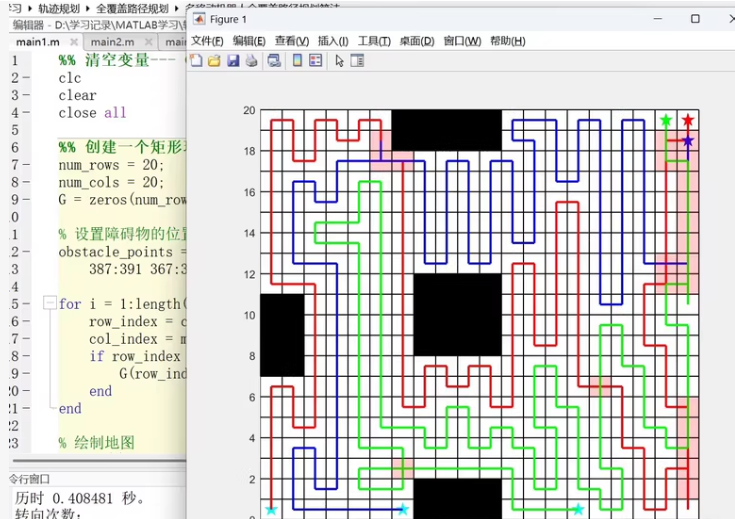
多无人机 移动机器人 扫地机器人 全覆盖路径规划多无人机 移动机器人协同路径规划1、基于 A 星算法的路径规划方法,地图可自定义设置,障碍物也可自定义设置,算法适合二次开发使用;2、基于贪婪算法的路径规划方法,地图可自定义设置,障碍物也可改变,算法适合二次开发使用。
基于YOLOv8深度学习的驾驶员行为检测系统基于深度学习YOLOv8+Pyqt5的驾驶员行为检测识别系统(完整源码源文件+已标注的数据集+训练好的模型)识别分类:“睁眼”,“闭眼”,“香烟”,“电话”,“安全带”Python + PyQt5可视化界面可对图片,视频,摄像头进行识别

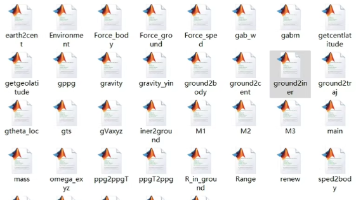
基于 matlab航天飞行动力学计算常用坐标系转换函数库(发射系 惯性系 地理坐标系 地心坐标系 机体系 速度系)欧拉角相互转换函数,支持321和231两种转序切换
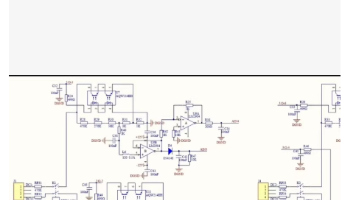
绝缘检测方案,绝缘检测资料。通过使用STM32F103单片机【pp】,不平衡电桥测电阻
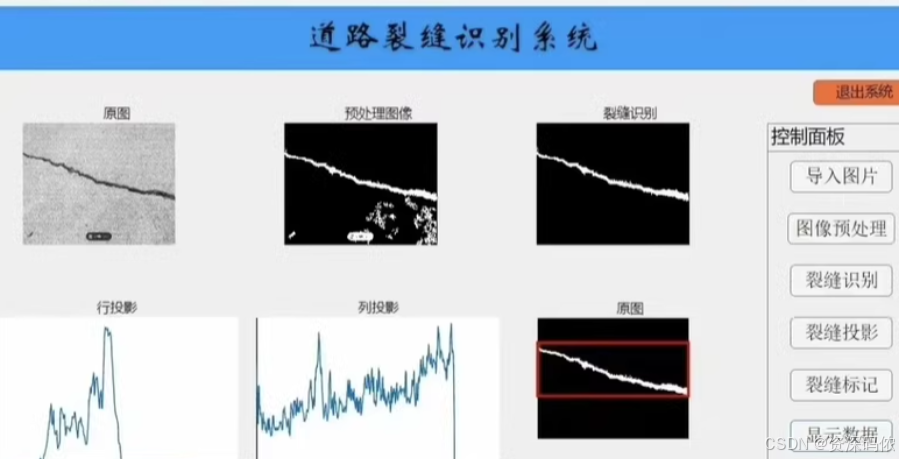
基于MATLAB的道路裂缝检测等 【裂缝识别】基于计算机视觉,含GUI界面 步骤:直方图均衡化,中值滤波去噪,对比度增强基于MATLAB的道路裂缝检测等 【裂缝识别】基于计算机视觉,含GUI界面 步骤:直方图均衡化,中值滤波去噪,对比度增强,二值化处理,二值图像滤波等,二值化处理,二值图像滤波等
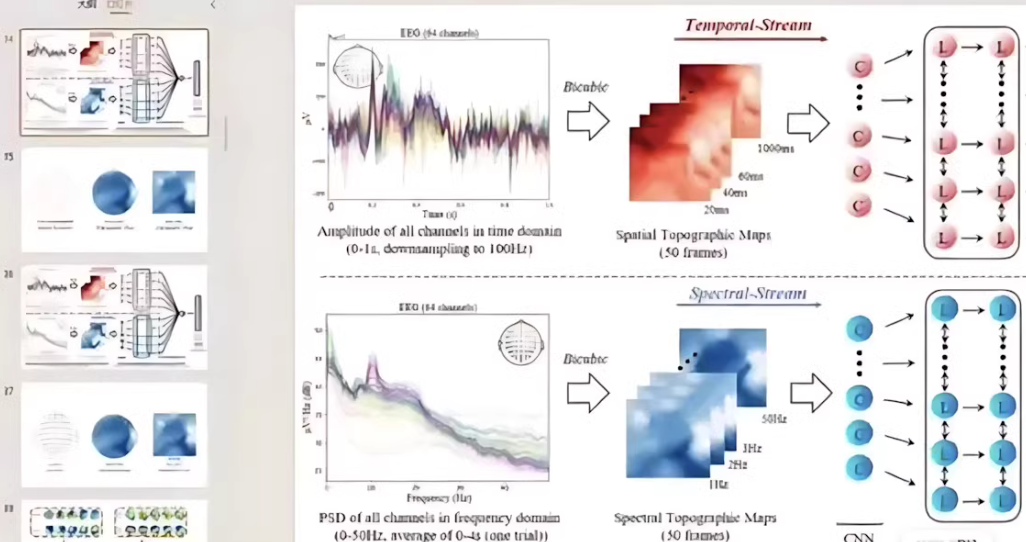
神经网络模型PPT绘图模板,深度学习画图。由PPT绘制的神经网络模型架构图,累计页数200+,包含但不限于LSTM、CNN、RNN、BiLSTM、BiLSTM-attention、Transformer等神经网络模型,每一元素均可以直接编辑。适用于从事深度学习相关领域的模型结构图绘制,模型结构不仅美观且元素相对独立可直接剪切、编辑。
基于matlab的行人和车辆检测系统【目标检测】基于计算机基于matlab的行人和车辆检测系统【目标检测】基于计算机基于matlab的行人和车辆检测系统

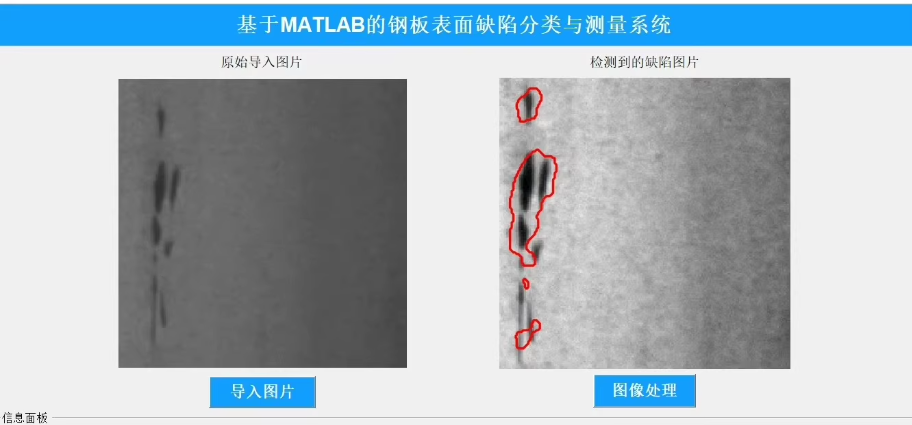
基于matlab的钢板表面缺陷分类与测量检测【缺陷检测】计算机视觉,含GUI界面(1)依据金属表面缺陷图片的特性,对图片进行适当的灰度变换(对比度增强与滤波处理);(2)对金属表面缺陷图片进行全局优化阈值分割;(3)提取二值图片区域边界坐标;(4)对金属缺陷进行特征提取;(5)对金属缺陷进行分类有监督训练;(6)完成对金属缺陷类型的判断与位置大小的计算;(7)完成金属缺陷检测的GUI设计。