




- @apple_52030329
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
软件版本Keil 531硬件以uc/OS-III为例,将其移植到stm32F103上,构建至少3个任务(task)下面进行实操UCOS是Micrium公司出品的RTOS类实时操作系统, UCOS目前有两个版本:UCOSII和UCOSIII。UCOSIII是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制,提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
决策树ID3是一种经典的机器学习算法,用于解决分类问题。它通过在特征空间中构建树形结构来进行决策,并以信息增益作为划分标准。ID3算法的关键在于选择最佳的属性进行划分,以最大化信息增益。通过Python实现ID3算法,我们可以构建出一棵高效而准确的决策树模型,用于分类预测和决策分析。参考。
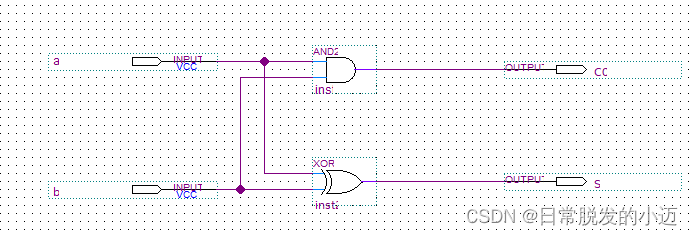
通过本次实验,学习了解了一位加法器,总体来说实验完成比较顺利,在实验过程中,出现了找不到驱动的情况,在查阅相关文章后,顺利解决。
卷积神经网络(Convolutional Neural Networks,简称CNN)是一种具有局部连接、权值共享等特点的深层前馈神经网络(Feedforward Neural Networks),是深度学习(deep learning)的代表算法之一,擅长处理图像特别是图像识别等相关机器学习问题,比如图像分类、目标检测、图像分割等各种视觉任务中都有显著的提升效果,是目前应用最广泛的模型之一。
在上一篇文章中,已经实现了一位加法器,在此基础上,下文将用原理图与Verilog编程两种方式,完成四位加法器的设计。下文步骤将不进行详细讲述,如有看不懂的地方,详见上一篇文章由于上一篇文章步骤较为详细,本次四位加法器的实现步骤省略了一部分,详情可参考上一篇文章。四位加法器是在一位加法器的基础上实现的。

卷积神经网络(Convolutional Neural Networks,简称CNN)是一种具有局部连接、权值共享等特点的深层前馈神经网络(Feedforward Neural Networks),是深度学习(deep learning)的代表算法之一,擅长处理图像特别是图像识别等相关机器学习问题,比如图像分类、目标检测、图像分割等各种视觉任务中都有显著的提升效果,是目前应用最广泛的模型之一。
NumPy 是一个 Python 包。它代表 “Numeric Python”。它是一个由多维数组对象和用于处理数组的例程集合组成的库。NumPy(Numerical Python) 是科学计算基础库,提供大量科学计算相关功能,比如数据 统计,随机数生成等。其提供最核心类型为多维数组类型(ndarray),支持大量的维度数组 与矩阵运算,Numpy 支持向量处理 ndarray 对象,提高程序运算
Logistic回归虽然名字里带“回归”,但它实际上是一种分类方法,主要用于二分类问题(即输出只有两种,分别代表两个类别),也可以处理多分类问题。
Modbus是一种广泛应用于工业控制领域串行通信协议,以其开放性、高可靠性、高效简单性、免费等优点,成为了工业领域通信协议的业界标准,是工业现场电子设备之间常用的连接方式。Modbus按其格式可分为,其中前两者适用于串行通信控制网络中,例如RS485,RS232等,而Modbus-TCP主要应用于基于以太网TCP/IP通信的控制网络中。通过此协议,控制器相互之间、或控制器和其它设备之间进行通信。M
在本练习中,我们将使用支持向量机(SVM)来构建垃圾邮件分类器。