- @tkhhhhh
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
理解系统架构与原理,掌握 DeepSeek 的基本工作原理、内部架构和检索机制,了解其在大规模语义检索中的优势。学习如何在本地环境中部署和调试 DeepSeek 系统,包括环境配置、依赖安装、参数调优等关键步骤。
智能体平台(Agent Platform)旨在为开发者提供一站式工具链,用于**创建**、**训练**、**部署**和**管理**智能体应用。它支持环境感知(传感器输入或数据流)、知识库管理(知识图谱或向量检索)、决策引擎(基于规则、强化学习或大模型推理)和执行层(动作指令或 API 调用)等核心模块。

国内很多租用的深度学习服务器要么无法稳定访问外网,要么访问速度较慢,而国内大模型的一大优势正是在这类环境下更容易调用。
常用插件:复制行/块:删除行:上下移动行/块:插入/替换模式切换:智能选择扩展:多光标选择: 或 代码折叠/展开:格式化代码:快速修复:跳转到定义:查看定义(悬停):查找引用:快速打开文件:查找文本:替换文本:全局查找文本:跳转到行:显示大纲:打开符号搜索:开始调试/继续执行:单步执行(跳过函数调用):步入(进入函数内部):步出(退出函数):切换断点:条件断点:查看变量/表达式值:查看源代码管理面
国内很多租用的深度学习服务器要么无法稳定访问外网,要么访问速度较慢,而国内大模型的一大优势正是在这类环境下更容易调用。
通过查阅相关的资料,这一报错是权限问题,以管理员身份运行安装程序应该可以解决问题。
传统 LLM 推理(LLM Reasoning)主要被视为一种对静态输入的单次(One-shot)或少数次(Few-shot)预测任务。传统方法假设上下文是静态的,推理过程发生在模型的内部参数空间中。模型无法在动态环境中采取行动、获取外部信息或根据结果进行自我修正。难以处理需要长期规划(Long-horizon)和持续学习的复杂任务。论文将智能体推理定义为一种以推理为中心机制不再是单纯生成文本序列
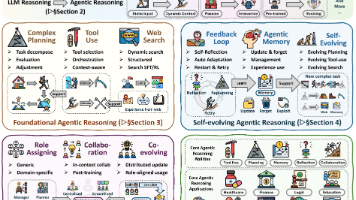
近年来,大语言模型(LLMs)在复杂推理任务上取得了显著进步。随着 OpenAI o1 等模型的出现,研究界开始关注如何通过增加推理侧的计算投入来突破模型原有性能的上限,这一方向被称为测试时缩放(Test-Time Scaling, TTS)。目前的 TTS 主要分为两大路径:一是通过强化学习训练模型生成长思维链(Internal TTS);二是在预训练模型保持不变的情况下,利用外部搜索和验证机制
智能体平台(Agent Platform)旨在为开发者提供一站式工具链,用于**创建**、**训练**、**部署**和**管理**智能体应用。它支持环境感知(传感器输入或数据流)、知识库管理(知识图谱或向量检索)、决策引擎(基于规则、强化学习或大模型推理)和执行层(动作指令或 API 调用)等核心模块。
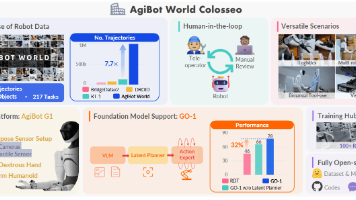
摘要: 论文《AgiBot World Colosseo》提出一个开源的大规模具身智能操纵平台,包含1M+轨迹、3000+物体和217个任务,支持物流、多机协作等场景。核心方法采用三阶段ViLLA架构,结合VLM骨干模型(InternVL2.5-2B)与潜在动作规划,显著提升任务泛化能力。实验表明,其策略GO-1在真实环境中优于基线(如RDT-1B),且数据集质量优于OXE等现有资源。创新点包括大