登录社区云,与社区用户共同成长
邀请您加入社区
本文介绍了HRTOS实时操作系统在8051架构单片机(STC8H8U64K)上的72小时可靠性测试。测试结果表明,HRTOS在连续运行72小时期间,成功处理了2786万次任务调度,CPU占用率77%,未出现系统复位、任务异常或调度错误等故障,验证了其任务调度、系统时序等核心功能的可靠性。该测试为HRTOS在资源受限的8051平台上的工程化应用提供了重要依据,未来还将进一步完善测试体系,提升系统稳定
本文介绍了一种基于STC89C51/52单片机的WIFI智能家居系统设计方案。系统集成了ESP8266无线模块、DHT11温湿度传感器、LCD1602显示模块、继电器控制电路、AT24C02存储芯片和声光报警模块。通过手机端发送特定指令实现远程控制家电、获取环境数据等功能,并支持温湿度阈值报警。系统采用模块化设计,硬件电路稳定可靠,软件程序采用C语言编写,具有良好的扩展性和实用性。测试表明,该系统
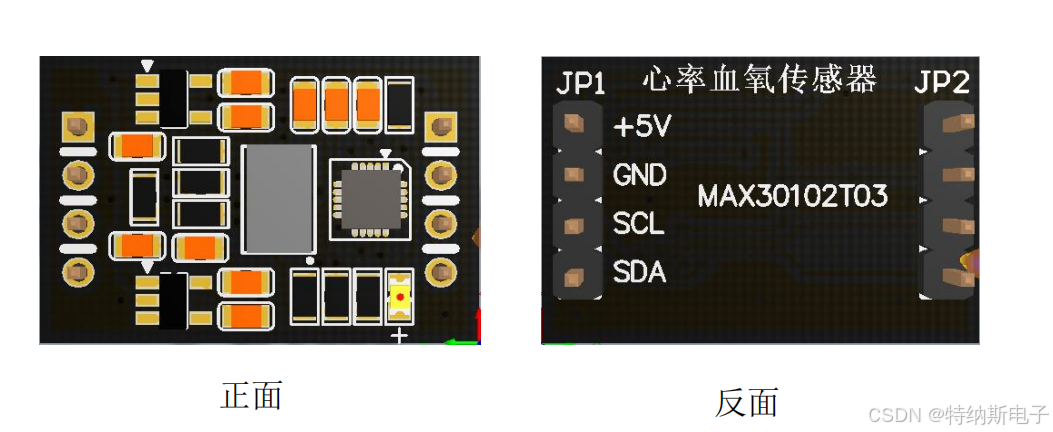
血氧心率测量模块集成了电源转换芯片(5V 转 3.3V/1.28V)、单片机(HC32F003)、血氧传感器(MAX30102)以及相关外围元件;其中模块上的单片机通过读取血氧传感器中的原始 ADC 数值,经过FIR 滤波及心率、血氧处理算法计算出经过量化的心率和血氧值;用户只需要通过简单的I2C或者UART接口即可读取到该模块中的心率、血氧数值,不用再去关心数据滤波及算法等问题,能够使自己的应用
DS18B20——温度传感器,单片机可以通过 1-Wire 和 DS18B20 进行通 信,最终将温度读出。1-Wire 总线的硬件接口很简单,只需要把 18B20 的数据引脚和单片 机的一个 IO 口接上就可以通信。最高12为的温度存储值,补码形式存储。2字节,LSB低字节,MSB高字节,-55~125
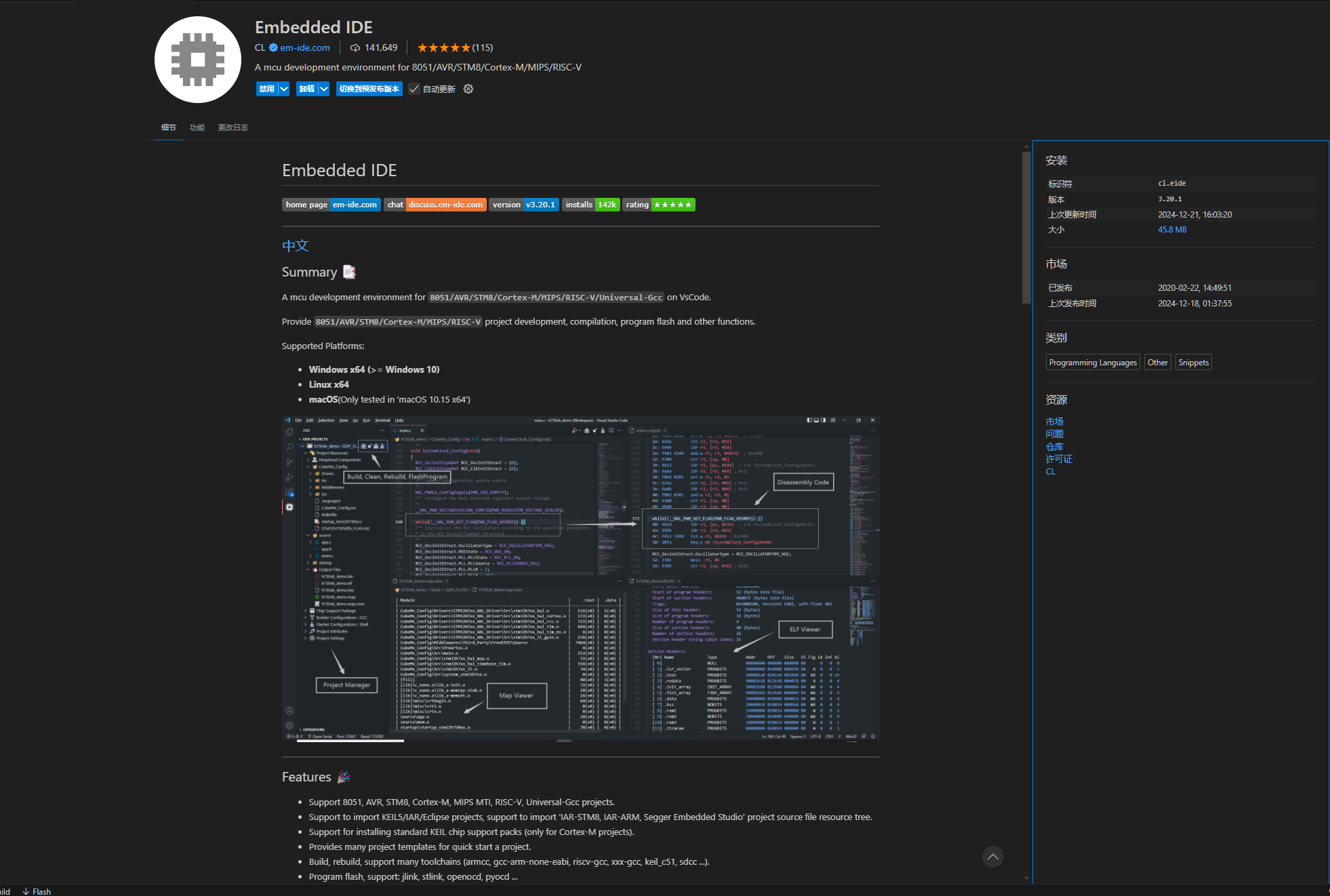
使用vscode + Embedded IDE插件来做嵌入式开发!
I2C(Inter-Integrated Circuit)是一种广泛应用于嵌入式系统的同步、半双工、二线制串行总线协议,以其简单的硬件连接(仅需SDA和SCL两根线)和多主多从的寻址能力,成为连接微控制器与各类外设(如传感器、存储器和显示器)的主流通信方式之一。其核心原理在于通过起始/停止条件、数据有效性和应答机制,在主机与从机之间实现可靠的数据交换。掌握I2C协议对于嵌入式开发具有重要价值,它是
基于深度学习的手势图像识别处理系统完整源码+数据集+项目报告+项目PPT全套12(设计源文件+万字报告+讲解)(支持资料、图片参考_相关定制)_用Python语言实现,深度学习和图像处理技术,CNN卷积神经网络。
该系统基于51单片机(如STC89C52)作为主控芯片,结合WiFi模块(如ESP8266)、温湿度传感器(如DHT11)和继电器模块,实现远程温湿度数据采集及家电开关控制。用户可通过手机APP或网页端实时监控环境数据并操控家电,适用于智能家居场景。
逗脑IDE"硬件场景"AI模式简化ESP32开发流程 传统ESP32开发需经历繁琐的IDE操作流程,而逗脑IDE的"硬件场景"AI模式将其简化为三步:描述需求→发送→自动完成。用户仅需切换至硬件场景、配置开发板信息(型号/串口/文件名),输入自然语言需求(如"LED以0.5秒间隔闪烁"),IDE即自动完成固件检测安装、AI代码生成、编译上传及执行全流程,并在终端显示实时日志。完成后可随时查看生成的
摘要: 积分控制通过累积历史误差消除系统余差,核心公式为$$u=K_i\times\int e,dt$$。与比例控制(P)的即时响应不同,积分(I)通过持续纠偏实现零误差,但存在积分饱和风险——误差长期存在时积分值无限累积,导致超调。解决方案是设置积分限幅(Anti-Windup)。对比纯P控制(有稳态误差)和PI控制(无误差),后者结合了快速响应与精准调节。文中提供了基于STM32的嵌入式C语言
OS Opetation system 操作系统。
本文介绍了8051单片机开发的创新方案——国产Forth操作系统"巨灵斧051"。这一系统由国内开发者历时十余年自主研发,突破传统C语言和汇编语言的开发局限,为经典8位单片机带来全新开发体验。系统采用Forth语言极简堆栈式架构,包含自主研发的F151三合一编程语言体系,支持交互式实时编程和混合汇编开发。其核心由51FORTH单片机操作系统和金鉴100上位机控制台组成,提供三种
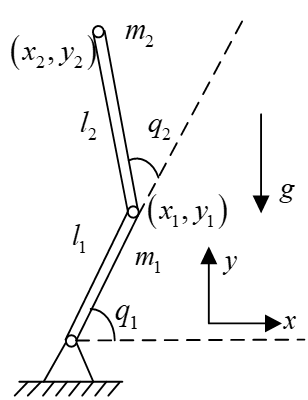
机械臂;双轴;动力学建模;拉格朗日
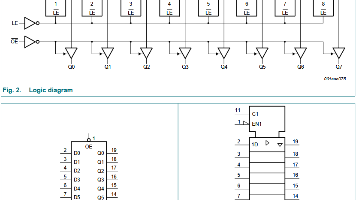
而国产YL1640可Pin to Pin、软硬件全兼容TM1640,无需修改PCB、驱动代码即可直接替换,解决原厂芯片供货紧张、成本偏高问题,是量产降本优选方案。本文完整讲解TM1640/YL1640芯片参数、硬件接线、通信时序、Arduino(ESP8266)完整驱动代码、故障排查与量产优化,新手可直接上手开发。YL1640增加自动消隐电路,静态显示无残影,量产稳定性更佳。多片TM1640/YL
一套开箱即用的433MHz无线遥控信号接收与解码方案,核心代码W433.c已适配标准8051单片机和STM32系列MCU,支持主流PT2262编码芯片的脉宽识别、地址数据分离及校验验证。配套提供21键遥控器详细编码文档,涵盖同步头时序、高低电平宽度定义、地址/数据位排列规则及典型波形图示,方便快速定位信号特征。代码模块清晰:包含外部中断触发捕获、定时器精准计时、同步头检测、逐位数据判读、校验位比对
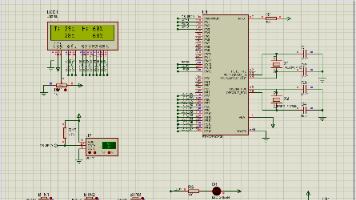
在Proteus中没有现成TM1620元件时,用STC89C52这类传统8051单片机,通过标准C语言代码完全模拟TM1620的全部行为:包括串行通信时序(如STB、CLK、DIO三线协议)、8位数码管动态扫描、段码/位码控制逻辑、4×4矩阵键盘扫描与去抖处理。资源包含两套Keil C51工程——一套作为主机模拟TM1620主控端发送指令,另一套作为从设备响应读写操作;所有源码可直接编译,生成HE
直接导入就能跑的51单片机红外遥控仿真方案,基于STC89C51/52兼容芯片,完整实现NEC协议红外信号接收、解码与响应。包里有两套可选固件:遥控.hex用于模拟红外发射端按键行为,解码.hex用于接收端解析并驱动LCD1602显示键值;Keil uVision5工程结构清晰,含main.c主控逻辑、解码.c核心算法模块、解码LCD.c显示适配代码,所有.LST、.OBJ、.M51、.PLG等编
直接可用的51单片机转向灯控制项目,P0口四路输出分别驱动左前、左后、右前、右后LED,P1.0和P1.1接独立按键,按S1亮左侧双灯交替闪烁,按S2亮右侧双灯交替闪烁。所有代码用标准C编写,基于8051寄存器定义,兼容STC89C52、AT89C51等主流51芯片。含完整Keil uVision工程(.uvproj/.uvopt)、编译生成的led_turn.hex固件、Proteus仿真文件(
一套开箱即用的51单片机多机串口通信教学实践资源,实现主机轮询控制两个从机的完整链路。所有代码用标准C编写,适配Keil C51环境,含三个独立主程序(mcu1Main.c为主机,mcu2Main.c/mcu3Main.c为从机),外设模块(LED、按键、目标设备)全部封装成可复用的.c/.h文件,方便移植与扩展。Proteus仿真工程muchMachine.DSN支持直接加载运行,配套muchM
用STC89C52或AT89C51这类常见51单片机,直接驱动步进电机,支持按键设定目标步数、手动切换正转/反转、自由选择4拍或8拍通电方式;运行中用不同颜色LED直观指示当前状态,LCD1602同步显示所选模式和剩余步数,方便调试和功能验证。资料包含可一键编译的C语言源码(main.c)、Keil完整工程(含uvproj和uvopt文件)、已生成hex烧录文件、原理图(SchDoc+PDF)、流
一套开箱即用的51单片机温湿度监测硬件实现方案,核心控制器为AT89S52,温度采集用DS18B20数字传感器,湿度检测采用HS1101湿敏电容配合RC振荡电路转换为频率信号再由单片机计数解算,测量结果实时刷新在四位共阳数码管上,支持按键设定温湿度上下限,超限时驱动有源蜂鸣器发出声光提示,并通过UART串口持续发送当前温湿度值、阈值状态及报警标志至上位机(如串口助手或自定义PC软件)。配套资源齐全
具体功能:1.DHT11检测温湿度值;2.LCD1602实时显示温湿度值及温湿度的上限值;3.温度或湿度超过设定对应上限值,声光报警;4.按键可以设置温湿度上限值;
基于STC89C52等经典51单片机搭建的电子秤系统,实测量程0–5kg,分辨率达0.1g。核心由HX711模块采集称重传感器模拟信号并完成高精度AD转换;DS1302芯片提供年、月、日、时、分、秒实时信息,掉电不丢失;LCD1602液晶屏同步显示重量数值与当前时间;所有数据通过标准UART串口持续发送至电脑,兼容常见串口调试助手,方便实时监控与记录。配套资源开箱即用:Proteus仿真工程(含.
基于STC89C52等常见51单片机,实现16×16或8×8 LED点阵屏的完整驱动方案。支持静态显示、闪烁、左右滚动等动态效果,通过独立按键实时切换模式与内容;同时预留串口通信接口,可连接PC端,用字模软件生成点阵数据后一键更新显示——只需替换程序中对应数组,就能自定义文字、符号甚至简易动画。资源包内含Keil C51工程(兼容Keil4/Keil5)、Proteus仿真文件(已实测逻辑准确)、
基于STC89C52等常见51单片机,搭配DS18B20数字温度传感器,实现0~50℃范围内±0.5℃精度的实时温度采集与监控。支持通过3个独立按键动态设置高温/低温报警阈值,无需重新烧录程序。报警逻辑分三级:温度进入阈值±10%缓冲区时启动低频蜂鸣(提示性预警);达到设定值时转为标准频率蜂鸣+LED闪烁(确认报警);超出±10%后切换为高频急促蜂鸣+LED快闪(严重超限)。显示模块兼容两种硬件路
直接烧录就能测温的51单片机温度采集方案,适配STC89C52、AT89C51等标准8051内核芯片。工程包含main.c主程序、独立封装的temp.c和temp.h温度驱动模块,严格实现DS18B20单总线通信时序——支持初始化、ROM搜索、跳过ROM、启动转换、读取16位原始数据、符号位识别及小数位解析(默认12位分辨率,精度±0.5℃),最终输出带一位小数的温度值(如25.6℃),方便接LC
一套开箱即用的红外循迹小车学习资源,核心控制器为STC89C52等兼容51单片机,通过红外对管识别地面黑线实现自动循迹。电路设计已在Proteus中完成仿真(.DSN文件),加载.hex固件即可运行;Keil C51工程结构清晰,包含main.c主程序及xunji.c(循迹逻辑)、pwm.c(双轮PWM调速)、1602.c(LCD1602驱动)、pid.c(速度闭环控制)等模块化源码,配套.h头文
一套开箱即用的51单片机课程设计实践资源,主控采用STC89C52芯片,包含Keil uVision4完整工程文件(.uvproj、.uvopt、.uvgui)、C语言主程序main.c、汇编启动文件STARTUP.A51,以及Proteus仿真电路design.DSN和原理图/PCB参考design.PWI。已通过编译验证,Objects目录含.hex和.obj等目标文件,Listings目录提
【代码】【51单片机学习笔记】:P01 STC89C52RC。
专为STC系列51单片机设计的串口接收稳定性增强方案,核心是轻量级环形队列(FIFO)实现,用纯C语言编写,独立封装为queue.c/queue.h模块,支持入队、出队、判空、判满等标准操作,避免中断接收时因处理不及时导致的数据覆盖或丢失。已与uart.c串口驱动深度耦合,适配常见波特率与中断模式。整个工程基于Keil uVision5构建,包含完整可编译项目uart5.uvproj、启动文件ST
基于STC89C52单片机的完整门禁系统Proteus仿真工程,支持密码与RFID双重解锁方式。用4×4矩阵键盘输入6位数字密码,按键可模拟RFID刷卡动作;LCD1602实时显示‘请输入密码’‘刷卡成功’‘错误次数超限’等状态信息;蜂鸣器在密码错误或非法刷卡时发出提示音;直流电机正反转模拟电磁锁开/关动作。密码支持初始化设置、修改功能,所有数据(含默认密码、用户密码)存入24C04 I²C EE
此外,随着市场需求的个性化、多样化,机床设备需要具备更强的适应能力,能够根据不同的加工任务灵活调整加工路径、进给速度等参数,因此,研究和设计一种具有较高智能化和自适应能力的小型钻铣工作站控制系统,具有重要的现实意义和广阔的应用前景。系统能够实现对钻铣机床的精准控制,包括进给速度、加工路径、工作状态监控等,且具备良好的扩展性,能够适应不同工作任务的需求。总的来说,国外在小型钻铣工作站控制系统的研究中
此类研究的代表性成果之一是日本丰田公司在其自动化仓库中的应用,其中利用电磁循迹技术的AGV车不仅能够在设定轨道上稳定行驶,还可以根据实时任务和仓库的变化灵活调整路径和速度,从而有效提高分拣效率。同时,随着人工智能、大数据等技术的不断进步,电磁循迹物流分拣车将更加智能化,能够根据实时数据调整运行策略,提高分拣效率与精度,进一步推动物流行业的科技创新和发展。未来,随着技术的不断成熟和成本的降低,电磁循
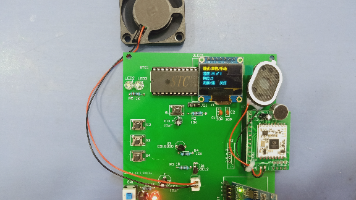
本系统由STC89C52单片机最小系统电路、OLED液晶显示电路、SNR9812语音识别电路、DS18B20温度检测电路、风扇驱动电路、光敏检测电路、高亮LED灯电路、按键电路及电源组成。【1】单片机实时采集温度数据、光照强弱状态,通过不同的模式进行控制风扇、高亮LED灯的开关状态,其中风扇可以调节档位的(0-5挡),而高亮LED只有开关2种状态。本设计分为自动控制模式、声控/手动模式。【2】设备
本文深入解析嵌入式C语言中const关键字的本质与常见误区。通过底层原理和代码示例阐明:const并非锁定内存地址,而是限制代码访问方式,防止误写数据。文章指出强制类型转换破解const是未定义行为,并分析STM32寄存器访问中const的实际应用,强调硬件修改与软件写入的区别。同时对比const与volatile的关键差异,明确前者管控代码权限,后者管控编译器优化。最终总结const在嵌入式开发
本文系统介绍了嵌入式开发的核心要点与技术路线。首先分析MCU与MPU的差异:MCU集成度高、成本低,适合简单控制任务;MPU性能强、可运行完整操作系统。接着对比RISC与CISC指令集,指出ARM架构的主导地位和RISC-V的崛起潜力。开发工具链部分阐述交叉编译概念,比较IDE与轻量级开发环境的优劣。软件架构方面,从裸机开发到RTOS再到Linux驱动,揭示了不同复杂度场景下的技术选择。行业趋势部
嵌入式系统作为现代智能设备的核心技术,已形成千亿美元级市场。2024年全球市场规模达1008.6亿美元,预计2033年将突破1675亿美元,年复合增长率9.2%。行业呈现三大技术趋势:边缘AI推动本地化智能决策,RISC-V开放架构打破ARM垄断,MCU向智能化演进融合AI与无线通信。主要应用于汽车电子、工业控制、智能家居等领域,其中汽车电子需求尤为突出。人才市场呈现结构性短缺,具备硬件、操作系统
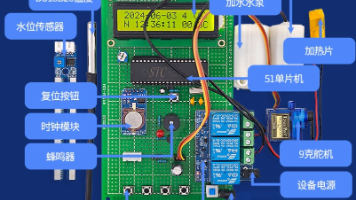
本课题以家用小型水族养护场景为应用目标,基于 51 或 STM32 单片机搭建集成多传感器的智能水族综合控制系统。系统搭载 DS1302 实时时钟芯片实现精准定时调度,采用 DS18B20 完成水温采集并驱动 PTC 加热模块恒温调控,水位传感器实时监测水体高度,搭配双水泵分别实现自动补水、定时换水;通过 9g 舵机完成定时定量投喂控制,LCD1602 液晶屏可视化展示时间、温度、水位及设备运行状
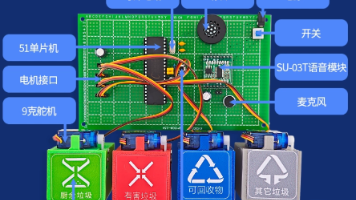
本课题以垃圾分类智能化需求为导向,采用 STM32 或 51 单片机作为核心控制器,搭配 SU-03T 离线语音识别模块、9 克舵机、扬声器外设,设计一款集成 AI 语音分类识别、语音播报、四仓自动开盖的智能垃圾分类控制系统。系统通过离线语音模块采集用户语音指令,完成垃圾分类识别与人机对话交互,可识别预设垃圾品类与开关仓门语音命令;单片机接收识别信号后驱动对应 9 克舵机完成厨余、有害、可回收、其
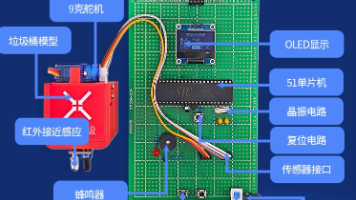
本课题以家用小型智能垃圾桶为研究对象,采用 STM32 或 51 单片机作为主控单元,融合红外感应、HC-SR04 超声波测距、9g 舵机、按键、蜂鸣器等外设硬件,设计一套集成自动开盖、垃圾满溢声光报警、手动 / 自动模式切换功能的智能垃圾桶控制系统。系统通过红外人体感应触发舵机实现桶盖自动开启,人体离开后延时 8 秒自动闭合;超声波模块实时检测桶内垃圾高度,垃圾距离传感器小于 5 厘米时触发蜂鸣
51单片机
——51单片机
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区
 深开鸿 技术专区
深开鸿 技术专区




 智能体开发者社区
智能体开发者社区
 AI编程社区
AI编程社区
 乐奇 Rokid 开放社区
乐奇 Rokid 开放社区


 AI硬件创业社区
AI硬件创业社区


 全球具身智能开发者社区
全球具身智能开发者社区

 AMD开发者中国社区
AMD开发者中国社区


 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区

 AI Agent技术社区
AI Agent技术社区