- @2508_94202330
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
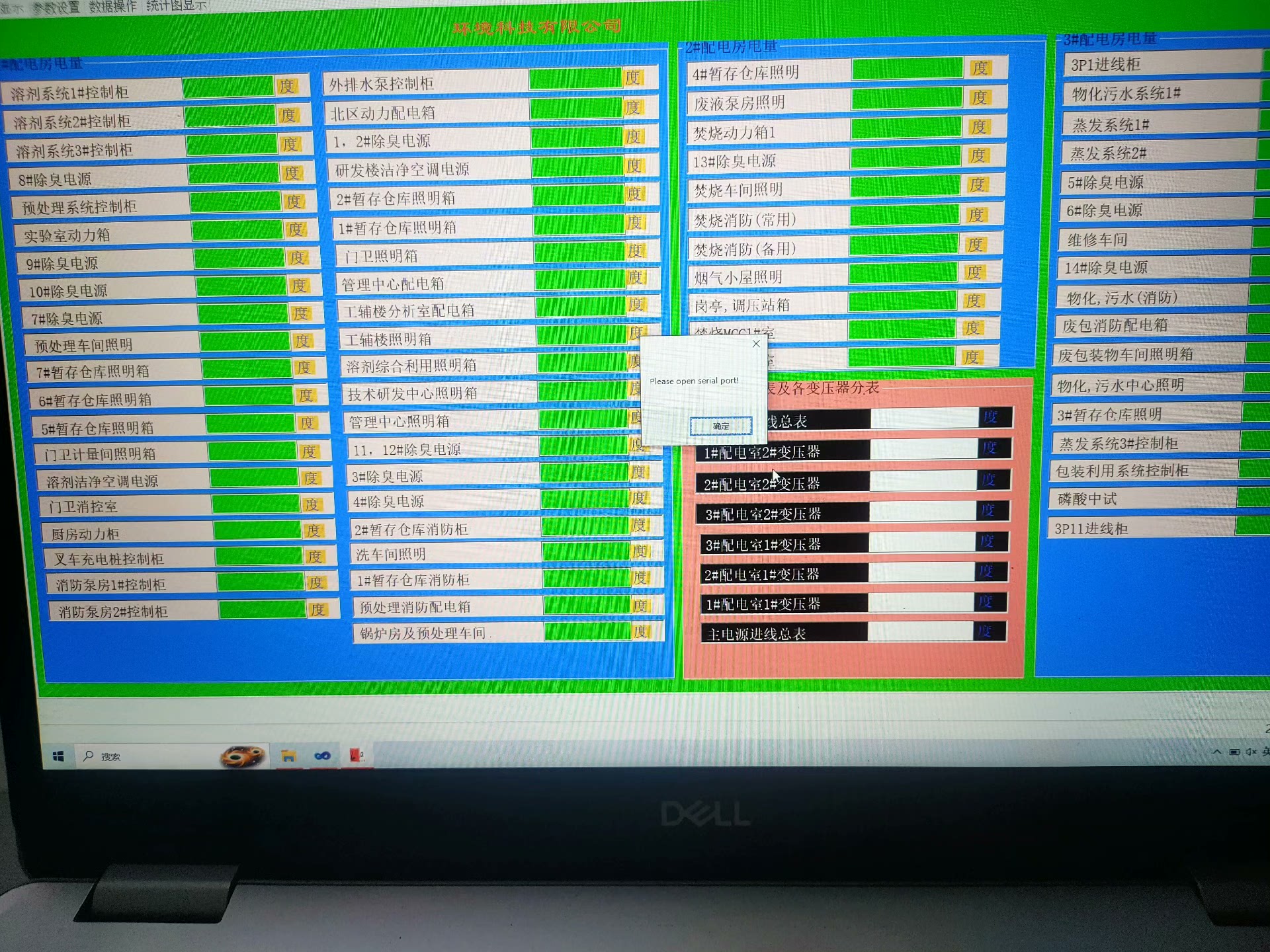
先看硬件拓扑:485总线手拉手连70块表,每块表配置了不同的设备地址(1-70)。现场70块表计需要通过MODBUS 485总线采集数据,用C#撸了个稳定运行的电量采集系统。代码层面增加了错误数据过滤规则,比如排除负电量和突变值。C#编写电量采集系统,MODBUS 485通信读取70块电量表电度数(电表品牌:中电),里面有完整的采集源码,采集数据10分钟存盘一次存至数量库,随时可查看或计算区间电量
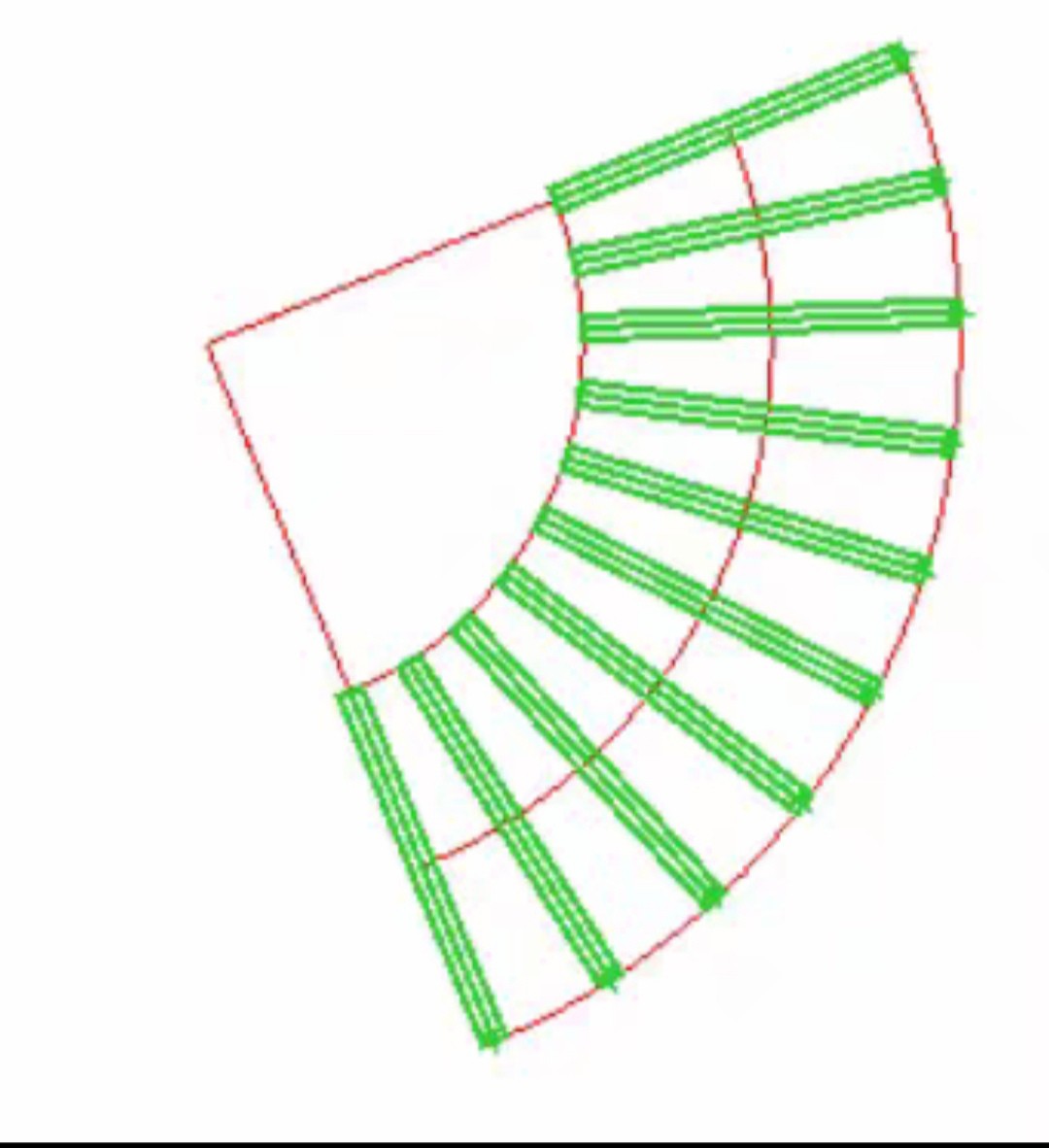
上次算石墨烯体系时发现,当网格从50x50提升到100x100时,陈数从0.89跳变到1.02,这其实是数值误差在作妖。最近在实验室搭了个简易光路验证拓扑边界态,老板突然甩过来一句"你这陈数到底准不准",得,老老实实用COMSOL重新算一遍更踏实。打开COMSOL新建二维模型,先画蜂窝晶格的基本单元。当两者结果冲突时,大概率是原胞边界条件没设对——老司机都知道,蜂窝结构的手性边缘处理能坑掉80%的
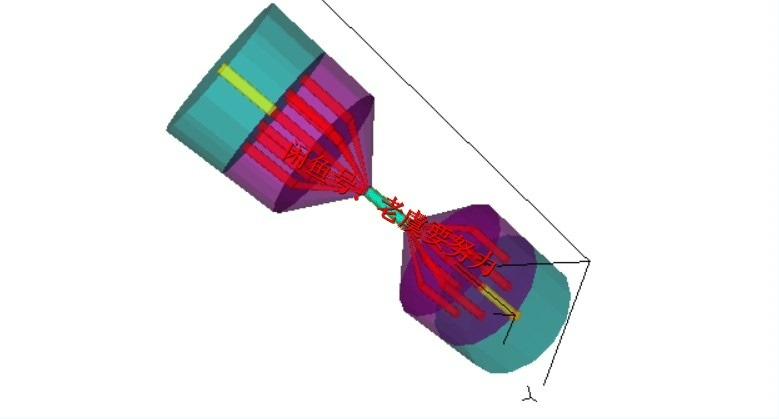
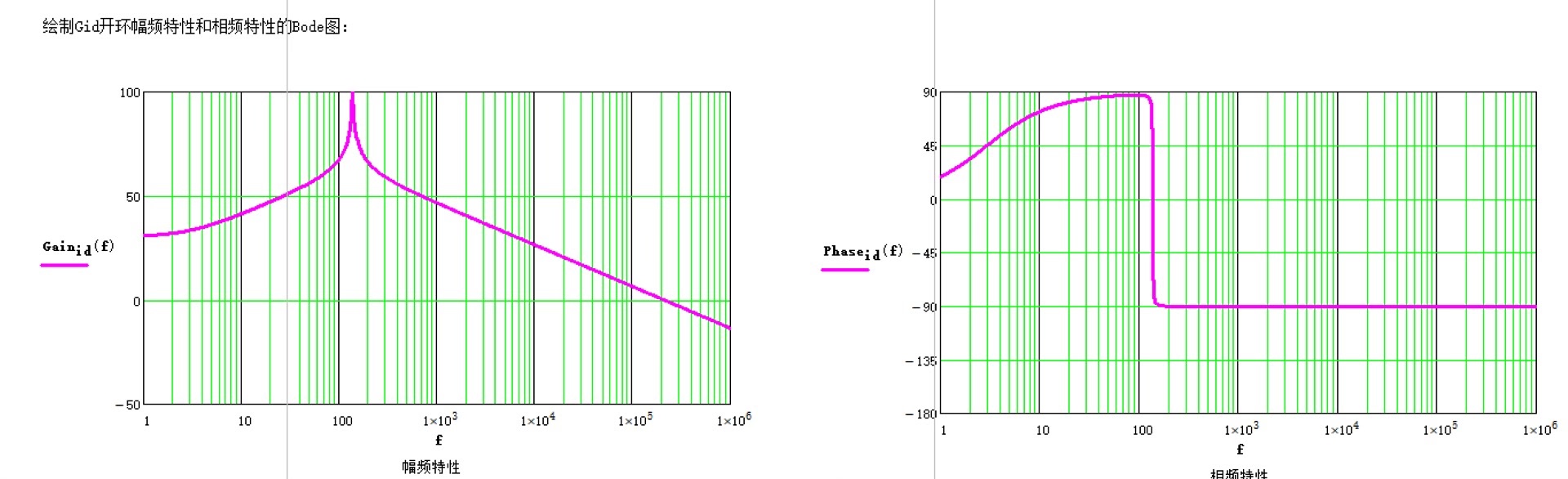
这种结构既能实现宽范围电压调节,又能保证高效率转换,特别适合数据中心这种对能耗敏感的场景。5%的容差会导致峰值效率偏移2%以上,所以实际选型时要优先选用精度高的C0G材质电容。看这个典型的驱动波形截图(图1),注意观察初级侧开关管的Vds和Id波形重合面积——这个重叠区域直接反映开关损耗。调试这种两级拓扑记住三个要点:先调Buck级确保母线稳定,再调LLC开环验证谐振点,最后整定闭环参数。先上干货
注意这里的ΔI_L设定为电感电流峰值的20%,这个比例直接关系到电感体积和损耗的博弈。实际调试时会发现,当负载突变时,15%-25%的纹波系数会让电感啸叫表现完全不同。参数表生成后别急着交差,用Mathcad的Excel组件自动输出到表格模板,再用Python脚本批量生成Simulink验证模型。整套操作行云流水,这才是工业级参数计算的真谛——公式是死的,但工具链必须是鲜活的。今天就带各位手撕这份
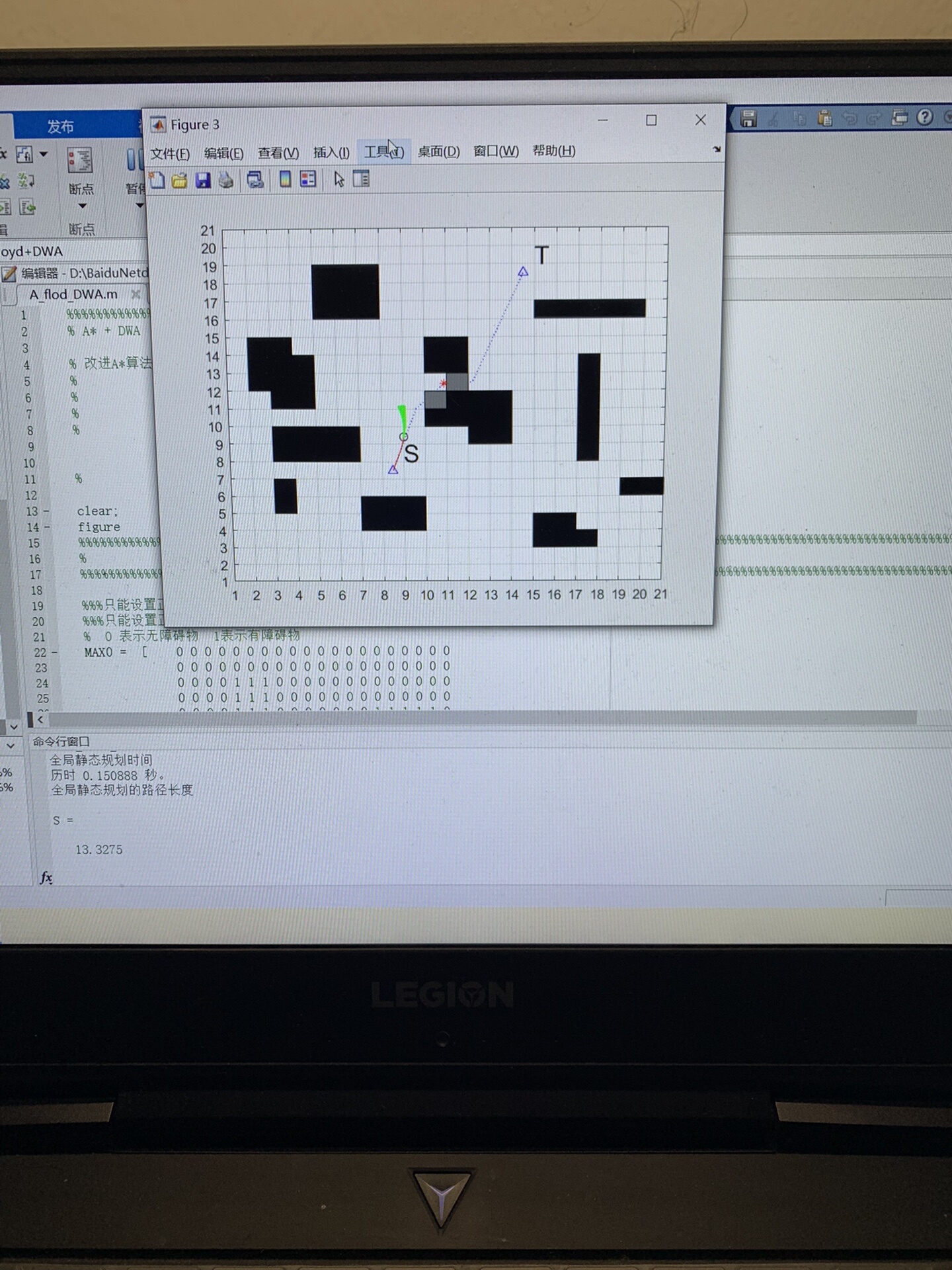
这个预测补偿解决了控制延迟导致的路径摆动,比单纯提高控制频率省了30%的CPU占用。注意预测时间要根据实际电机响应调整,别整过火了。这里给路径对齐加了时间衰减权重,实测在走廊场景下跟丢概率从23%降到7%。注意指数函数处理障碍距离,比线性变化更能避开死亡华尔兹。当雷达检测到临时障碍时更新risk_map,这样A星生成的路径会自动避开拥堵区。某次实测中,动态调整让重规划次数减少了62%。这个骚操作通
通过以上设计和实现,我们成功地在STM32F405上实现了无感FOC控制。全开源:提供完整的原理图和源代码。高精度:滑膜观测器和PLL结合使用,保证了控制精度。高性能:STM32F405的高性能保证了控制的实时性。如果你对这个方案感兴趣,可以关注我的GitHub仓库,获取完整的代码和原理图。(示例GitHub链接)希望这篇博文对你有所帮助!如果有任何问题,欢迎在评论区留言交流。
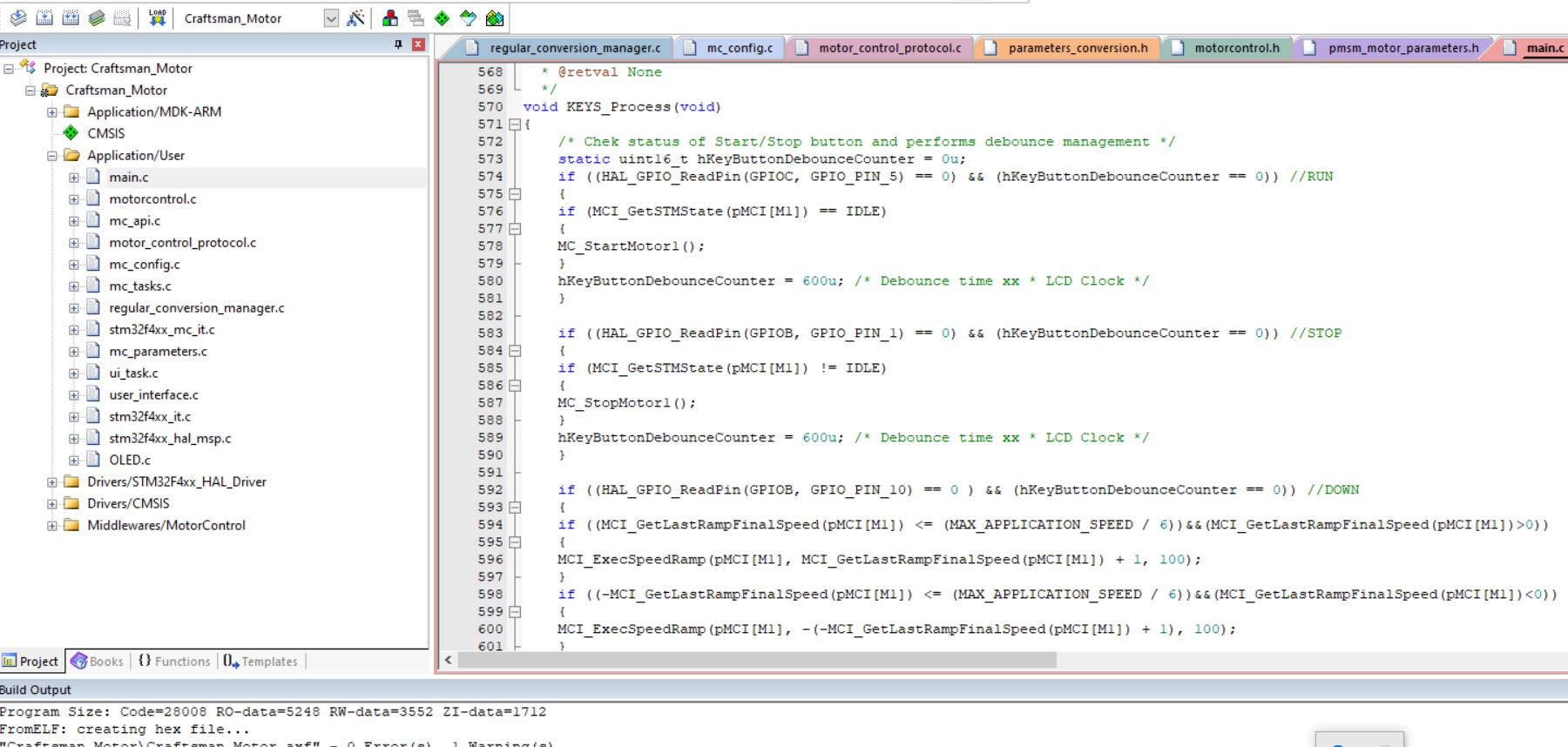
今天咱就聊一款实战验证过的FOC电机控制系统,直接甩你脸上电路图、PCB、全C源码三件套。别家代码藏着掖着像传家宝,这玩意儿直接能塞进GD32F1XX跑起来,移植到国产32位芯片也就分分钟的事。转把,高中低三速,上电防飞车,EABS电子刹车,有欠压超压检测,多种巡航功能,也可与铁塔王通讯、一键通、隐形限速、防盗功能;别看就五步,这可是FOC控制的核心骨架。Controller,记得Star留个记号
单片机ESP8266+继电器+云平台+MQTT服务,DIY实现物联网。该物联网云平台使用Java语言、经典技术组合(MQTT、Spring Boot、Shiro、MyBatis、Druid、Thymeleaf、Bootstrap、Swagger)开发,支持集群,支持多数据源,支持分布式事务。1、出售全套源码、设备模块,包含单片机源码、云平台源码、MQTT服务、数据库设计、相关资料等,可提供,可远程

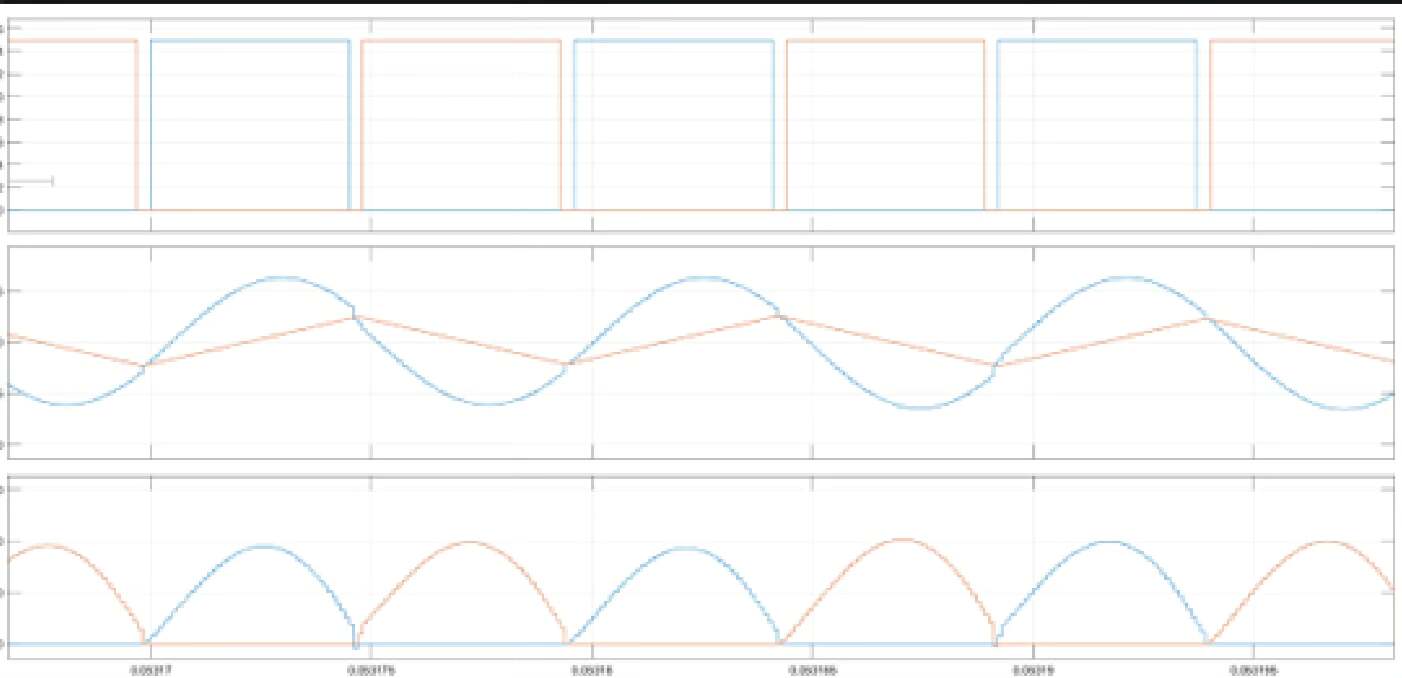
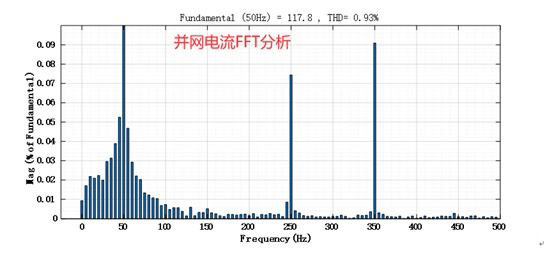
三相级联H桥逆变器光伏并网系统控制框图如图2包含:载波移相调制,MPPT,电压电流双闭环波形如图所示,波形完美系统动态特性良好在光伏并网系统的领域里,三相级联H桥逆变器可是个相当热门的研究与应用方向。今天咱就来唠唠这个有趣的系统。三相级联H桥逆变器光伏并网系统控制框图如图2包含:载波移相调制,MPPT,电压电流双闭环波形如图所示,波形完美系统动态特性良好先看看控制框图(就像图2展示的那样),这里面
本框架以“设备无关、算法插件化、业务可编排”为设计目标,将工业现场 80% 的共性需求抽象为四大类、二十余个子模块,覆盖“取像→标定→定位→测量→识别→通讯”完整链路。开发者无需关心底层 OpenCV 版本差异与相机 SDK 细节,通过统一接口即可在 30 分钟内搭建一条视觉检测工程。该框架把“工业视觉”拆分为可插拔的原子能力,让开发者聚焦工艺逻辑而非算法细节;全部源码,包含图像显示控件,绘制ro