
写文章




- @qq_39675084
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Webots 循迹小车仿真
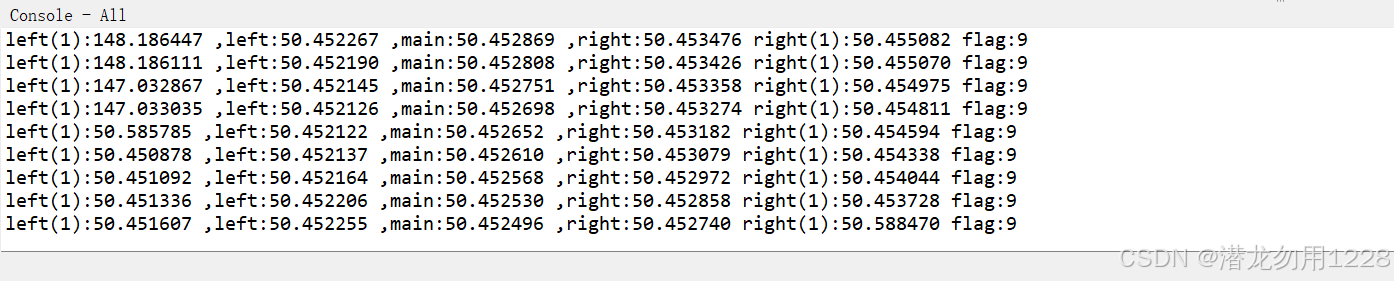
0与1的界定:我的程序是按照红外传感器的数值大于51即为检测到黑线,小于51即没检测到,可以看到没检测到时大约为50.45....所以51对于不用PID更准确和灵敏。进圆时检测信号可以观察到是01010的情况于是小车向右或者向左转都可以但不能不转,用差速让他。我的小车大概会检测七次这样的条件然后从红格子这里拐进去(flag即标志位按实际去改)向右转—>直行—>推箱子到指定位置—>后退到红色方块位置
如何将训练好的yolov11模型离线部署到MaixCam上
把yolov11离线部署到maixcam上
到底了