- @2301_79745346
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文研究了基于Spark技术的数据分析系统设计与实现。系统分为元数据配置和数据分析两大模块,采用Flash技术提升用户体验。文章详细阐述了系统需求、可行性分析、架构规划架构及程序设计思想,并展示了登录界面、输入模型管理等具体实现。该系统解决了传统数据处理问题,支持大数据分析,具有部署灵活、扩展性强等优势,在电商物流等场景中能有效提升数据分析效率。

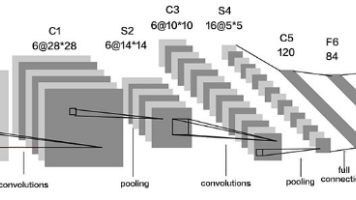
本文介绍了一种基于卷积神经网络(CNN)的人脸识别签到系统设计与实现。文章首先阐述了人工神经网络(ANN)和CNN的基本理论,包括网络结构、层次功能和工作原理。在系统实现方面,详细说明了开发环境配置(Windows10+PyCharm+TensorFlow1.14.0+OpenCV)和硬件要求(i5处理器)。系统设计包含三个主要功能模块:学生信息录入、签到主界面和出勤信息管理,采用Qt Desig
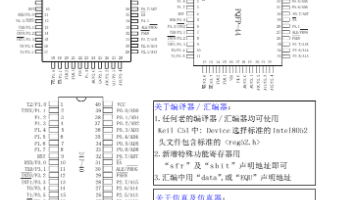
本文设计了一款基于AT89S52单片机的低成本自动搬运机器人,适用于小型仓库等狭窄空间。系统采用模块化设计:动力模块由直流减速电机和L298N驱动板组成;感知模块包含红外循迹、超声波避障等传感器;执行模块采用舵机控制的机械爪。软件基于Keil C51开发,实现"导航-感知-执行"闭环控制。测试表明,机器人导航精度误差小于10cm,抓取5kg货物成功率90%,续航5小时,总成本约
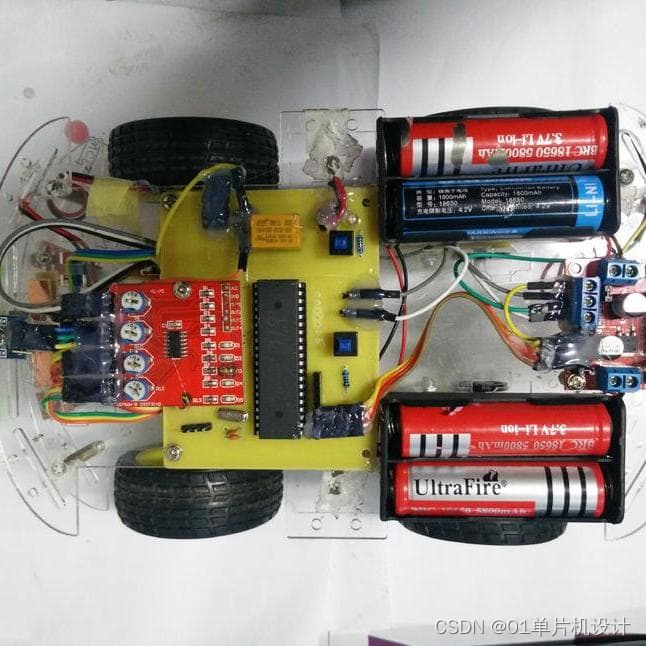
*单片机设计介绍,基于单片机智能寻迹灭火小车机器人系统设计。
摘要:本文设计了一种基于STM32F103RCT6的自主避障移动机器人控制系统,通过多传感器协同实现全方位障碍物检测(180°范围,精度误差≤5cm)。系统采用四轮差分驱动结构和改进型Bug算法,可实现0.5秒内快速避障响应。硬件电路设计模块化,软件程序采用C语言编写,通过定时中断和状态机管理确保实时性。测试表明,该系统在家居和仓库环境中能稳定运行1.2小时,避障距离误差≤4cm,转向平滑无碰撞,
摘要: 本文设计了一种基于STM32F103RCT6的自主避障移动机器人控制系统,采用多传感器融合方案实现全方位障碍物检测(超声波+红外传感器,覆盖180°范围,精度误差≤4cm)。系统硬件包含传感检测、运动驱动等模块,软件采用模块化设计,通过改进Bug算法实现0.4秒内的快速避障响应。测试表明,机器人能在家庭、仓库等场景中稳定运行(速度0-0.8m/s),绕障半径30-40cm,续航1.2小时,
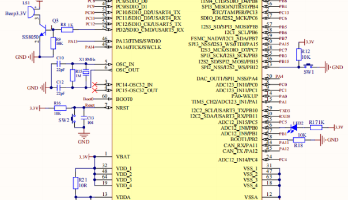
本文基于STM32F10x芯片设计了一套人形机器人控制系统硬件方案。系统采用"核心控制-传感采集-电机驱动-电源管理"架构,以STM32F103ZET6为核心,实现16自由度机器人关节控制。硬件电路包含最小系统、传感器接口、PWM电机驱动和多电压电源管理模块。测试表明系统控制精度达0.8°,满足行走、抓取等动作需求。未来可优化无线通信、散热和模块化设计,提升系统拓展性。该方案解
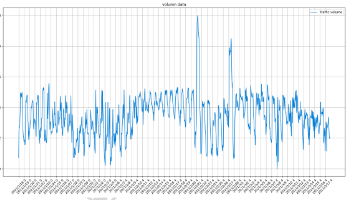
本文设计并实现了一种基于深度学习的交通流量预测系统,采用STGCN-LSTM融合模型捕捉交通流量的时空特征。系统通过四层架构实现数据采集、预处理、模型预测和可视化展示,关键创新包括时空特征融合、多尺度预测和模型轻量化优化。测试结果显示,15/30/60分钟预测的平均绝对百分比误差分别为6.2%、7.8%和9.5%,较传统方法提升45%,响应时间小于0.8秒。该系统可提升路网通行效率15%以上,为智
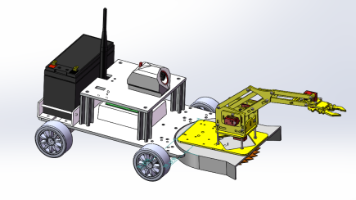
本文设计了一款自走式除草机器人,包含视觉系统、控制系统、驱动系统和执行系统四大模块。通过比较电动、液压和气压三种驱动方式,最终选用电机驱动方案。机器人采用后轮驱动结构,配备机器视觉识别杂草,四自由度机械臂执行除草任务。利用SolidWorks软件完成了阶梯轴、底盘等零件的三维建模与装配,形成了完整的机器人三维装配体。该系统具有结构简单、控制灵活的特点,适用于精准除草作业。
本文设计了一种基于STM32单片机的蔬菜大棚智能监控灌溉系统。系统通过DHT11、YL-69等传感器实时监测环境参数(温湿度、CO₂、光照等),采用模块化架构实现精准灌溉控制。实验表明,该系统可降低42%用水量,提高作物品质,并减少60%人工巡检成本。未来可扩展AI预测、远程管理及水肥一体化功能。系统具有低成本(单棚≤300元)、高可靠性特点,适合中小型蔬菜大棚智能化改造。