




- @2502_92009732
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
ROS2自动导航小车搭建手册摘要 本手册详细介绍了从零搭建ROS2自主导航小车的完整流程。主要内容包括: 硬件环境搭建: 树莓派4B安装Ubuntu 24.04 Server系统 配置SSH远程连接和WiFi网络 USB设备名固定(激光雷达和STM32控制器) 软件环境配置: 安装ROS2 Jazzy发行版 虚拟机搭建Ubuntu 24.04开发环境 VSCode远程开发配置 系统架构设计: 上位
ROS2自动导航小车搭建手册摘要 本手册详细介绍了从零搭建ROS2自主导航小车的完整流程。主要内容包括: 硬件环境搭建: 树莓派4B安装Ubuntu 24.04 Server系统 配置SSH远程连接和WiFi网络 USB设备名固定(激光雷达和STM32控制器) 软件环境配置: 安装ROS2 Jazzy发行版 虚拟机搭建Ubuntu 24.04开发环境 VSCode远程开发配置 系统架构设计: 上位
本文介绍了一个基于STM32F407和ESP8266的串口转WiFi服务器项目实现过程。项目采用FreeRTOS操作系统,目标是通过实战练习FreeRTOS基础功能(任务、队列、信号量等),并完成AT模块的socket封装和WebServer实现。 主要内容包括: 硬件连接与AT指令测试:通过串口助手验证ESP8266模块的联网和TCP通信能力 编程实现AT指令操作:开发代码控制ESP8266连接
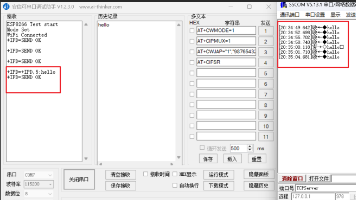
本文介绍了一个基于STM32F407和ESP8266的串口转WiFi服务器项目实现过程。项目采用FreeRTOS操作系统,目标是通过实战练习FreeRTOS基础功能(任务、队列、信号量等),并完成AT模块的socket封装和WebServer实现。 主要内容包括: 硬件连接与AT指令测试:通过串口助手验证ESP8266模块的联网和TCP通信能力 编程实现AT指令操作:开发代码控制ESP8266连接
本文详细介绍了如何在VSCode中使用PlatformIO创建ESP32-S3开发项目。主要内容包括:1)新建项目步骤(选择开发板型号、框架和存储位置);2)项目文件结构说明;3)配置platformio.ini文件的关键参数;4)编写简单的"Hello World"测试程序并上传到开发板。文章还提供了常见问题的解决方法,如上传失败和串口无响应等。通过本指南,开发者可以快速搭建
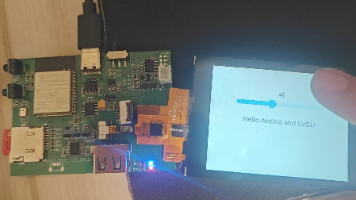
本文详细介绍了如何在ESP32-S3开发板上移植和配置LVGL图形库。主要内容包括:1) 通过PlatformIO添加LVGL、TFT屏幕和触摸驱动库;2) 配置LVGL核心文件lv_conf.h和屏幕驱动TFT_eSPI;3) 设置触摸驱动CST816S的I2C参数;4) 编写主程序注册显示和触摸设备,并创建简单测试界面;5) 介绍LVGL常用部件(按钮、滑块等)的创建方法和事件处理机制。文章提
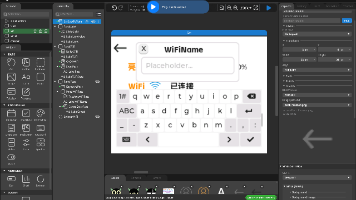
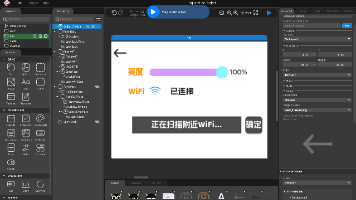
本文介绍了如何为基于ESP32-S3和FreeRTOS的智能终端添加WiFi连接功能。通过将WiFi处理任务放在Core0后台运行,实现了流畅的GUI交互体验。文章详细讲解了WiFi功能实现流程,包括界面设计、全局数据结构定义、关键功能函数实现(如WiFi扫描、连接和状态更新),以及事件回调处理。采用FreeRTOS多任务架构,将WiFi操作与LVGL界面刷新分离,确保了系统响应性能。最后提供了测
本教程详细介绍了如何为ESP32-S3智能终端实现时间和天气功能。主要内容包括:1) 注册心知天气API获取密钥;2) 添加ArduinoJson库处理JSON数据;3) 核心代码解析:通过NTP服务器获取时间、调用天气API并解析返回数据;4) 使用FreeRTOS任务实现后台自动更新;5) 常见问题排查方法。重点讲解了HTTP请求构造、JSON数据解析以及UI更新等关键环节的实现细节,并提供完
本文介绍了如何利用FreeRTOS优化ESP32-S3的LVGL界面刷新性能,并实现屏幕亮度调节功能。通过将LVGL刷新任务独立绑定到Core1,解决了传统loop()方式导致的界面卡顿问题。详细说明了任务创建、亮度调节滑块的实现(包括PWM控制背光引脚)以及硬件注意事项。该方法充分利用了ESP32-S3的双核特性,确保了GUI流畅运行的同时为其他任务预留处理空间,显著提升了嵌入式系统的交互体验和
摘要:本文介绍了使用SquareLineStudio工具快速开发嵌入式GUI界面的方法。从安装软件开始,详细说明了创建工程、设计界面、导入资源等步骤,重点讲解了如何将生成的UI代码移植到ESP32-S3的PlatformIO项目中。文章还提供了界面初始化代码示例,并提醒注意版本匹配和屏幕方向调整等常见问题。通过这种拖拽式设计工具,开发者可以大幅提高嵌入式界面开发效率。