- @qq_46187594
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在 RAG、AI Agent 和智能客服等场景中,。但很多团队仍卡在“本地跑通 demo → 线上崩得无声无息”的循环里。本文不讲抽象原理,:如何用搭配,构建一个支持千万级向量、P99 < 85ms、自动分片、带监控指标的生产级语义检索服务,并给出。
显示某个 Region 的 keys 数量是其他 Region 的 50 倍?手动分裂后,新 Region 为何迟迟未被 PD 调度到其他 TiKV 节点?—— 这个被低估的内置函数,正是打开 TiDB 存储层黑盒的一把关键密钥。且高位参与排序 —— 这直接决定了 Region 分裂边界是否均匀。“为什么这个表的 QPS 突然飙升但 CPU 却不涨?TiDB 将 SQL 表结构映射为有序的。(Ti
在双碳目标驱动下,。数据中心年耗电量占全球总用电量约1.5%,其中——它们持续申请CPU但实际利用率常低于5%,却锁住内存、网络与I/O资源,造成隐性能源浪费。本文提出一种轻量、可落地的:不依赖硬件传感器,,实现对Pod粒度的实时功耗建模与节能调度。已在生产环境稳定运行6个月,集群PUE下降0.08,闲置CPU周期减少42%。
在现代数据架构中,,而是承载着实时分析、机器学习训练、合规审计等高价值场景的核心底座。user_tier本文提出一种:基于,结合,实现的端到端体验。已在某千万级 Iot 设备日志平台稳定运行 6 个月,日均处理 42TB 增量数据,Schema 变更平均生效时间。
在人工智能飞速发展的今天,已从实验室走向工业落地,广泛应用于智能客服、无障碍阅读、车载语音助手等场景。本文将带你深入一个,全程使用构建,代码可直接运行,适配多种部署环境。
在 Electron 占据主流多年的今天,已成为跨平台桌面应用的普遍痛点。2024 年,越来越多团队开始转向—— 一个以 Rust 为后端、Web 技术为前端的现代跨平台框架。它不嵌入 Chromium,而是复用系统 WebView(Windows WebView2 / macOS WebKit / Linux WebKitGTK),**最终产物体积可压缩至 3–8 MB,内存常驻 < 80 MB
在双碳目标驱动下,。数据中心年耗电量占全球总用电量约1.5%,其中——它们持续申请CPU但实际利用率常低于5%,却锁住内存、网络与I/O资源,造成隐性能源浪费。本文提出一种轻量、可落地的:不依赖硬件传感器,,实现对Pod粒度的实时功耗建模与节能调度。已在生产环境稳定运行6个月,集群PUE下降0.08,闲置CPU周期减少42%。
在高通量基因组分析中,是临床解读、群体遗传与药物基因组学的关键前置步骤。传统流程依赖ANNOVARSnpEff或VEP,虽功能完备,但存在启动延迟高、内存占用大、难以嵌入实时分析服务等问题。本文提出一种,结合内存映射(mmap)、BWT 索引压缩与零拷贝解析技术,在保持 99.7% 与 SnpEff v5.1 兼容性的同时,实现(实测 12-core Xeon Gold 6330)。
*非常详细的视频和文字教程,讲解常见的openmv教程包括 巡线、物体识别、圆环识别、阈值自动获取等。非常适合学习openmv、K210、K230等项目视频合集链接在openmv教程合集 openmv入门到项目开发 openmv和STM32通信 openmv和opencv区别 openmv巡线 openmv数字识别教程LCD专刊openmv视觉文章链接:[https://blog.csdn.net
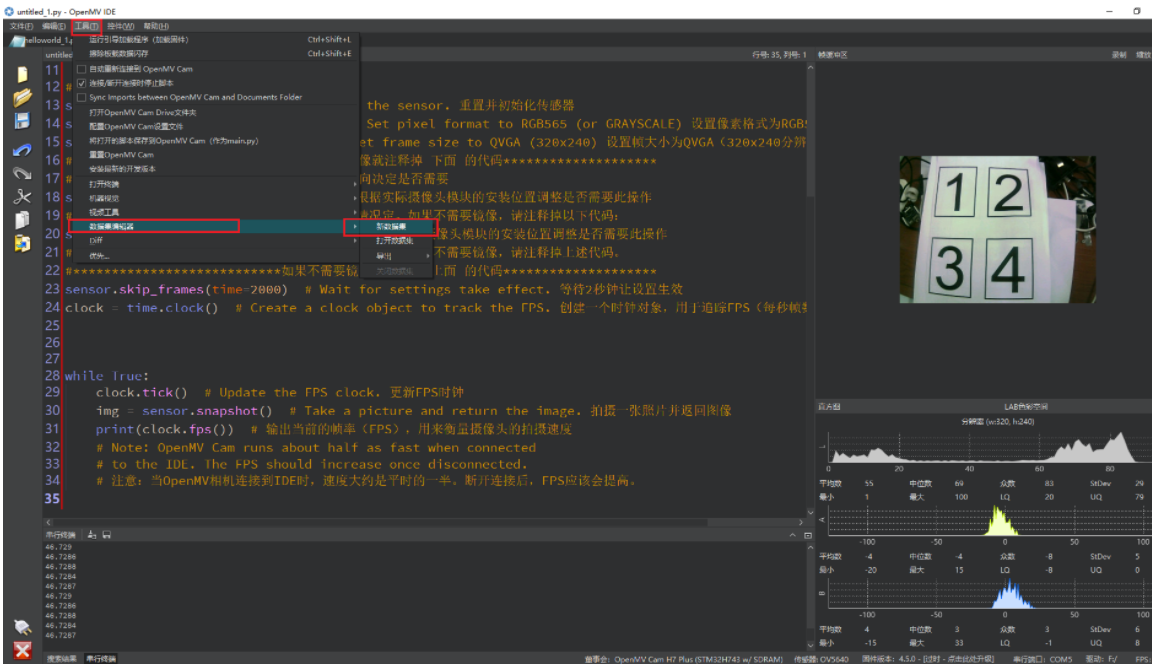
这个是视频。第一篇CSDN文章在这里75STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机跟随。