- @2301_79312104
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了一个基于JAVA的超市收银系统开发项目。系统通过SSM框架和MySQL数据库实现了商品管理、销售管理、库存管理和报表统计四大核心功能模块。采用B/S或C/S架构设计,完成了从需求分析、系统设计到代码实现的完整开发流程,并进行了全面测试确保系统稳定性。该系统有效解决了传统收银方式的弊端,提升了超市运营效率和顾客体验。文章最后总结了系统特点,并展望了未来优化方向,如移动支付集成、智能库存预警
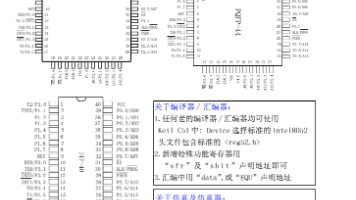
本文设计了一种基于STM32F103单片机的离线语音识别智能家居系统。该系统采用LD3320语音识别模块,支持自定义唤醒词和10余条控制指令,通过本地化处理实现照明、空调、窗帘等设备的语音控制,响应时间低于1秒,识别准确率达92%。硬件成本控制在200元以内,具有无需网络、保护隐私、部署简便等特点。测试表明系统稳定可靠,适用于普通家庭智能化改造。未来可扩展精细化控制指令和环境联动功能,进一步提升用

本文设计了一款基于嵌入式AI的图形化编程机器人系统。硬件平台选用K210处理器,支持MicroPython编程,并配备OV2640摄像头实现机器视觉功能。系统采用模块化设计理念,通过FreeRTOS实时操作系统和图形化配置工具(menuconfig)实现软件可裁剪性。配套开发的图形化编程软件支持模块拖拽生成Python代码,包含基本程序结构和硬件控制模块。测试表明,该系统能满足教学需求,具有开放性
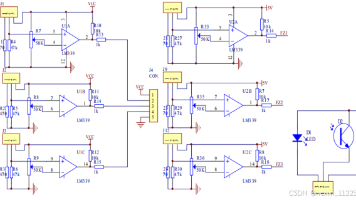
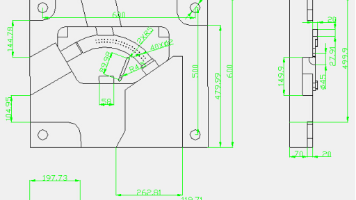
本文介绍了扫地机器人系统的设计与实现。系统采用LM7805双路稳压电源设计,分别供电给控制电路和电机驱动电路,确保稳定性。防撞电路使用红外对管检测障碍物,通过比较器输出信号给CPU处理。电机驱动采用L9110芯片实现正反转控制。PCB设计使用Protel99SE完成主板电路集成。外壳采用有机玻璃材料制作,具有透明性和易加工特性。系统调试中发现红外传感器易受阳光干扰,吸尘功率不足等问题,通过优化安装
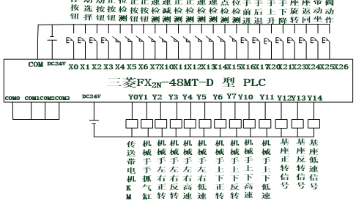
本文研究了基于PLC控制的新型工业码垛机器人系统。码垛机器人因其高效、安全、节省成本等特点,在食品、饮料等行业应用广泛。研究采用并联机构机械结构,选用电气驱动方式和42BYGH47-0406A步进电机,设计PLC控制系统实现物料抓取、升降、旋转等自动化动作。通过梯形图编程和MCGS组态完成系统仿真,实现了传送带物料检测、机械臂运动控制等功能。该系统具有定位精度高、维护方便等优势,为工业自动化生产提
摘要:本文设计了一种基于STM32单片机的消防巡检机器人系统,针对高温、粉尘、有毒气体等危险环境下的消防巡检需求,集成了温度、烟雾、火焰等多传感器模块,通过履带式移动机构实现自主巡检。系统采用模块化设计思路,包含感知层、控制层、执行层和通信层,具备24小时不间断巡检、实时隐患监测、无线数据传输等功能。测试表明,该机器人可有效降低人工巡检风险60%以上,提升巡检效率50%,适用于化工厂房、商场车库等
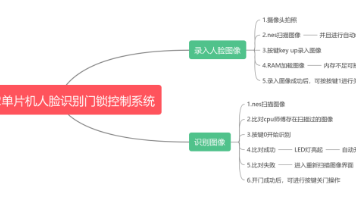
本文设计了一种基于STM32单片机的人脸识别门锁控制系统。系统采用OV2640可调焦摄像头采集人脸图像,通过按键电路实现图像录入、识别和删除功能,并利用TFT显示屏进行图像显示。系统硬件以单片机为核心,软件设计包括图像录入存储和人脸比对识别两个主要模块。测试表明,该系统能有效实现人脸识别开门功能,适用于门禁、考勤等场景。虽然系统实现了基本功能,但仍需进一步优化算法以提高识别精度和智能化水平。该系统
本文介绍了使用UG软件进行零件实体特征建模和数控仿真加工的全过程。首先阐述了UG软件作为CAD/CAE/CAM一体化工具的先进功能,包括实体造型、曲面设计和数控编程等。随后详细说明了零件建模的具体步骤,涉及拉伸体、钻孔、布尔运算等特征操作。在数控加工部分,重点描述了从CAD模型到CAM加工的转换流程,包括加工环境设置、工序安排、坐标系定义等关键环节。最后介绍了后处理工序和NC代码生成方法,完成了从
本文设计了一款基于嵌入式AI的图形化编程机器人系统。硬件平台选用K210处理器,支持MicroPython编程,并配备OV2640摄像头实现机器视觉功能。系统采用模块化设计理念,通过FreeRTOS实时操作系统和图形化配置工具(menuconfig)实现软件可裁剪性。配套开发的图形化编程软件支持模块拖拽生成Python代码,包含基本程序结构和硬件控制模块。测试表明,该系统能满足教学需求,具有开放性
摘要: 本文设计了一种基于物联网的家庭植物智能养护系统,通过感知层传感器实时监测土壤湿度、温湿度、光照等参数,结合云端算法自动调控浇水、补光等操作。系统采用Wi-Fi/蓝牙双模传输,支持手机APP远程管理,具有养护阈值自定义、异常报警等功能。实测表明,该系统可提升植物存活率60%,响应延迟仅2.2秒,解决了传统养护依赖经验、易遗忘等问题。未来可通过AI图像识别、智能施肥等技术进一步优化,实现更精准