登录社区云,与社区用户共同成长
邀请您加入社区
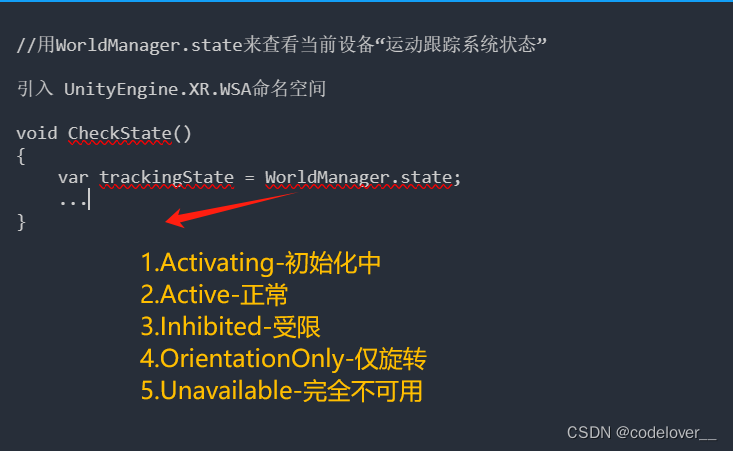
Azure 空间定位点为开发人员提供了工具,用于创建 HoloLens 的空间感知混合现实应用程序(通过 ARKit 为 iOS 设备创建,通过 ARCore 为 Android 设备创建)。通过项目复习Azure空间定位点的基础知识,为接下来在HoloLens上做虚实配准工作打下基础。在 Unity 菜单中,选择Window > TextMeshPro > Import TMP Essentia
自己的学习笔记
基于Hololens开发—本地化控件锚点本地化空间锚基于Hololens的空间映射,本项目本章内容主要是对Hololens端的离线瞄点进行保存,当再次启用项目时将数据进行读取重置当前位置。具体过程见“注释”public class SpaceAnchorController : MonoBehaviour{public string ObjectAnchorStoreName;WorldAncho
本书给出的AVX512预取优化方案,在SSD存储访问场景中,通过`_mm_prefetch((char)(ptr + 0x1000), _MM_HINT_T0)`提前加载后续数据块,将磁盘IO流量波动降低60%。在高动态库场景下,`__attribute__((always_inline))`与`__forceinline`的组合使用显式告知链接器。在NUMA架构基准测试中,相较标准`std::m
本文通过剖析现代C++编程范式与经典计算机科学理论的交互作用,揭示研究生在算法设计、系统实现及工程实践中的核心技能演进路径。基于模板元编程(TMP)、RAII模式及现代C++特性,提出面向复杂数学建模与分布式计算的解决方案,为学术创新提供可复用的工程方法论。本文揭示了面向未来计算的研究生必须构建的组合式技能栈——将类型系统的哲学深度、并行计算的并发智慧与工程实践的落地能力有机整合。通过持续在语法糖
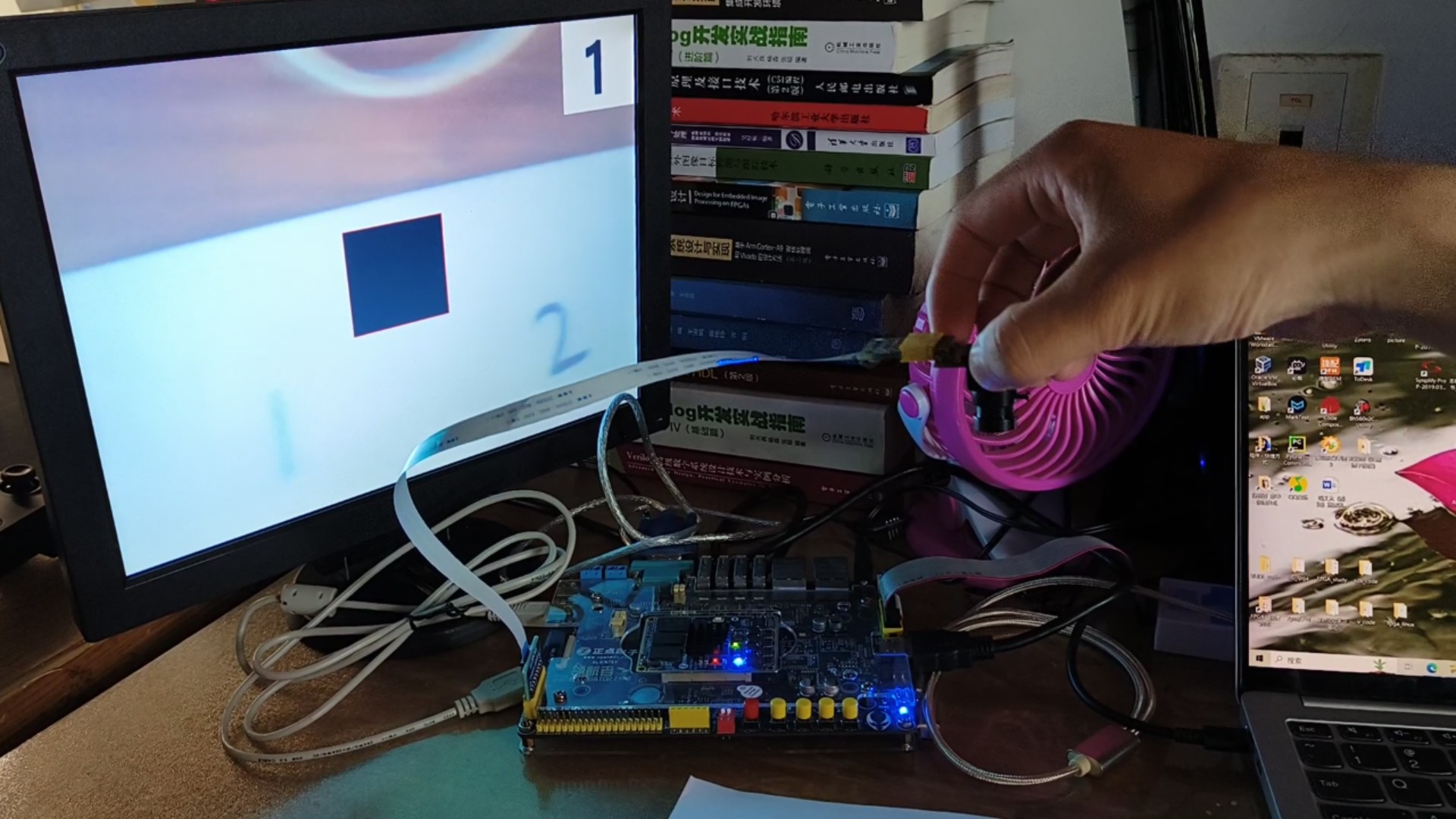
工程移植到其他板子时,最烦人的是摄像头和显示屏的引脚分配。从OV7725摄像头抓图到HDMI实时显示,FPGA和ARM两个核心分工明确得就像火锅店前厅后厨的配合——一个管火候,一个管摆盘。这行代码里的魔法数字可不是随便凑的,77、150、29这三个系数是人眼对不同颜色敏感度的量化值,比简单取平均讲究多了。在此工程的基础上,可以适配到正点原子的其他开发板上,也可以继续在FPGA端加速卷积神经网络。在
机器视觉是一个涉及多学科交叉的领域,需要我们掌握图像处理、计算机视觉、控制理论等多方面的知识。通过学习OpenCV、QT等工具,我们可以一步步构建出属于自己的机器视觉系统。无论是工业自动化,还是智能家居,机器视觉都有着广阔的应用前景,希望这篇文章能为你打开认识这一领域的窗口。视觉识别定位抓取,相机标定,QT界面开发,OpenCV图像处理。
但 Snowshot 真正强大的地方在于它的【插件】功能,在软件主界面的“个性化”—“插件”中,提供了文本识别、视频录制、翻译、AI 对话等多种实用插件,用户可以根据需要点击安装,扩展软件的功能。其中水印功能特别实用,可以直接给截图添加水印,而且支持自定义水印颜色、文字内容、字体大小和透明度,这个功能在 QQ 和微信的截图工具里是没有的,所以在这方面它比常用的社交软件截图功能还要强大。
被此问题困扰了两天,具体现象是,编译正常,但是无法部署,在模拟器中运行也正常。调试过程中怀疑是环境出了问题,尝试过用全新的空项目进行测试、重装unity、重装vs、重装系统,均不奏效。因此基本锁定问题在HoloLens上。但是,出问题之前没有对设备进行任何修改。最终,经过比对,发现,蓝牙功能莫名其妙被打开了。如图,设备中出现了个0.0.0.0的ip地址,该错误根源在于ip错误
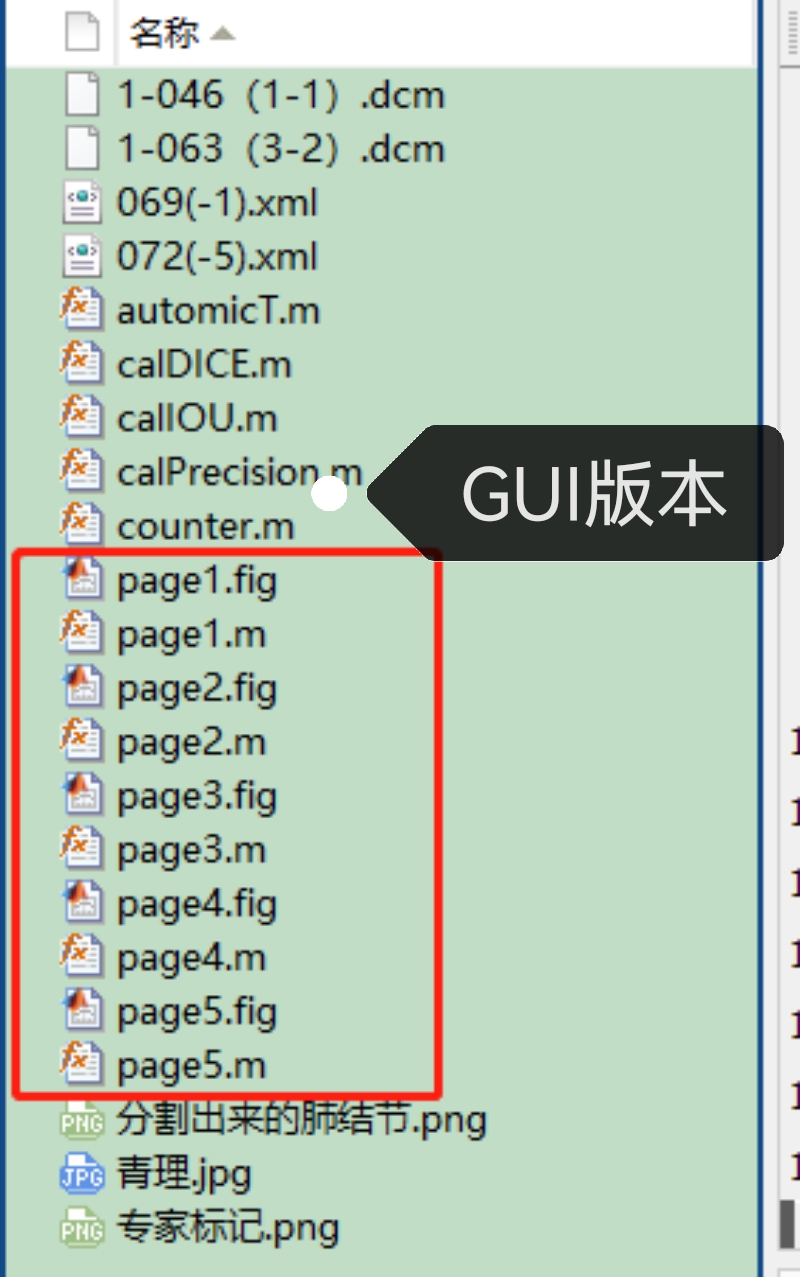
Matlab肺结节分割(肺结节提取)源程序,也有GUI人机界面版本。使用传统图像分割方法,非深度学习方法。使用LIDC-IDRI数据集。工作如下:1、读取图像。读取原始dicom格式的CT图像,并显示,绘制灰度直方图;2、图像增强。对图像进行图像增强,包括Gamma矫正、直方图均衡化、中值滤波、边缘锐化;3、肺质分割。基于阈值分割,从原CT图像中分割出肺质;4、肺结节分割。肺质分割后,进行特征提取
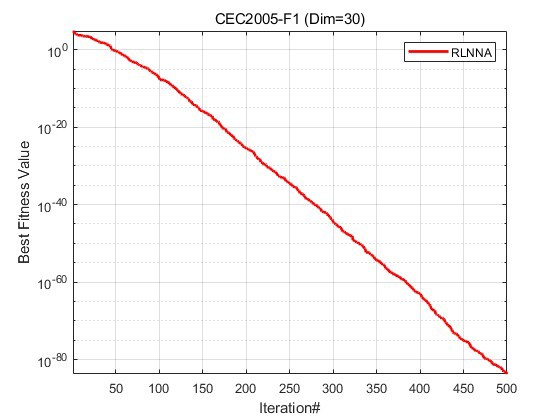
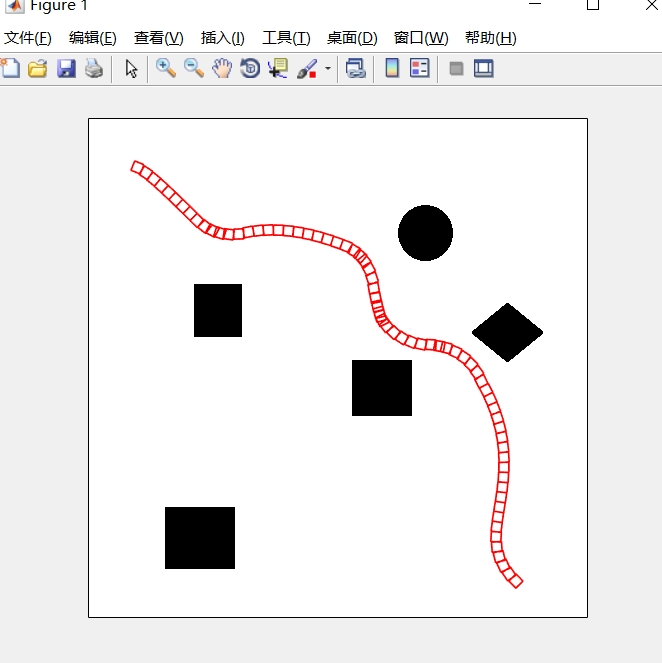
基于强化学习的神经网络优化算法(RLNNA)优化机器人路径规划基于强化学习的神经网络优化算法(RLNNA)是一种利用强化学习来优化神经网络的算法。它通过强化学习来训练神经网络,使其能够更好地适应不同的任务和环境。在RLNNA中,神经网络被视为一个智能体,它通过与环境进行交互来学习如何完成任务。这个智能体会有一个奖励机制,即根据完成任务的情况给予相应的奖励或惩罚。通过不断与环境交互,智能体逐渐学习到
数据准备阶段,我们通常读取包含销售记录的CSV或Excel文件,使用pandas的read_csv或read_excel函数加载数据,并进行初步的数据清洗,如处理缺失值、转换日期格式、筛选相关字段(如日期、销售额、产品类别等)。此外,可以应用统计学方法,如使用statsmodels库进行时间序列分解,将趋势、季节性和残差成分分离出来,从而更精确地把握 underlying pattern。本文将介
到此,完成上述步骤即可:开始调试不执行,最后即可成功部署。
HoloLens2开发教程之实时音视频通信课程介绍本课程将手把手带你开发一个HoloLens2应用,实现HoloLens2设备间,以及HoloLens2与Web浏览器间的实时音视频通信。课程涉及开发环境安装、应用部署、Bug排查等知识和技巧。课程收获配置HoloLens2开发环境创建和部署HoloLens2应用程序实现HoloLens2间的实时音视频通信实现HoloLens2与Web浏览器间的实时
请验证项目调试设置中指定了正确的远程身份验证模式。COMException - 由于目标计算机积极拒绝,无法连接。 (异常来自 HRESULT:0x8007274D) [0x8007274D]解决方法:可能是HoloLens与电脑没连好,重新插一下。确保在电脑的“设备和驱动器”上可以看到HoloLens设备。...
在VS2019中,使用WIFI部署项目到HoloLens中去,遇到了该问题。首先,参考https://blog.csdn.net/ether_7/article/details/108703262然而我的问题依然没有解决,最后,我终于发现了问题所在。我的电脑和HoloLens没有连在同一个WIFI下,将电脑和hololens接入同一个WIFI后问题解决。...
问题:在部署项目时,提示以下任意错误:DEP6957未能使用“通用身份验证”连接到设备“127.0.0.1”。请验证项目调试设置中指定了正确的远程身份验证模式;DEP0600: 部署失败。未能通过新的部署管道进行部署;DEP6953: 无法启动远程调试器,出现以下错误:“Command failed: 0x80270254”;OperationFailedException: 对 COM 组件的调
我看了很多网络帖子依旧没有解决问题:尝试过的解决方案如下:Unity版本高于5.2;VS版本是2019Enterprise 16.9.2;Win10系统并有SDK;关闭Hololens2蓝牙;却连pin码输入框都不弹出VS部署的设置为Release和ARM64 设备也尝试过Release和ARM64 远程发现远程可以弹框 并部署对VS组件进行一一对比之后发现缺少 USB设备连接性 组件安装后可正常
这个COMSOL两相流模型虽然看起来复杂,但其实是个很好的学习案例。通过这个模型,我们不仅可以学习到COMSOL的基本操作,还可以深入理解两相流的数值模拟方法。希望这篇文章能对你有所帮助,如果有任何问题,欢迎留言讨论!
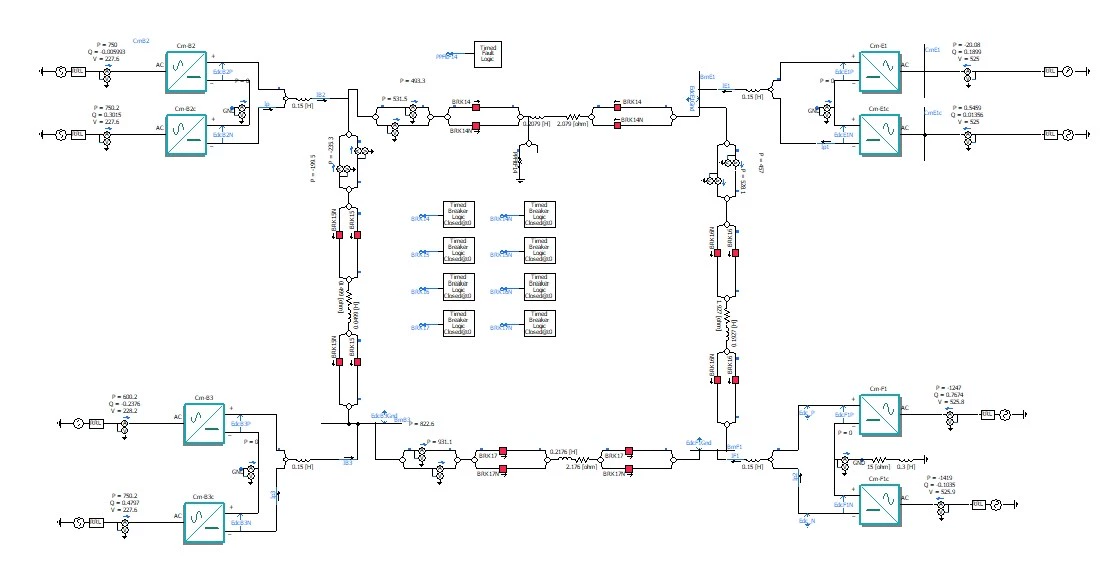
不对哦我翻的可研是张北(±500kV柔直)→冀北康保(±500kV柔直)→冀北丰宁(±500kV柔直抽水蓄能配套受端)→北京延庆(±500kV柔直北京主网接入),直流架空线的参数:R0≈0.008Ω/km,L0≈0.9mH/km,C0≈0.012μF/km,长度分别是张北-康保100km,康保-丰宁120km,丰宁-延庆180km——新手别直接用默认的直流线参数,默认的是±800kV或者更长的,参
今天咱们要唠的这个版本有点意思——AT89C51单片机驱动,Proteus仿真环境下跑得溜溜的,最骚的是还能在LCD上显示关卡二维码。老规矩,先把开发板接线图甩出来(此处应有Proteus截图),矩阵键盘+12864液晶的经典组合,外加蜂鸣器给操作音效加点料。实测发现,用Proteus自带的延时函数会抽风,得自己用定时器搓个精准延时。实际测试发现,51跑完整个编码得300ms左右,期间必须关中断,
目前这个小平台已经支持STEP、IGS、STL、OBJ、3DS、OSG等十几种格式了,多文档切换、装配体树状显示、模型高亮、测量、导出图片这些功能都能用,网格划分导出也没问题,后续打算加个参数化建模的模块和剖切功能。代码已经开源到Gitee了,有兴趣的小伙伴可以去扒拉,要是能给个star就更开心了😎。
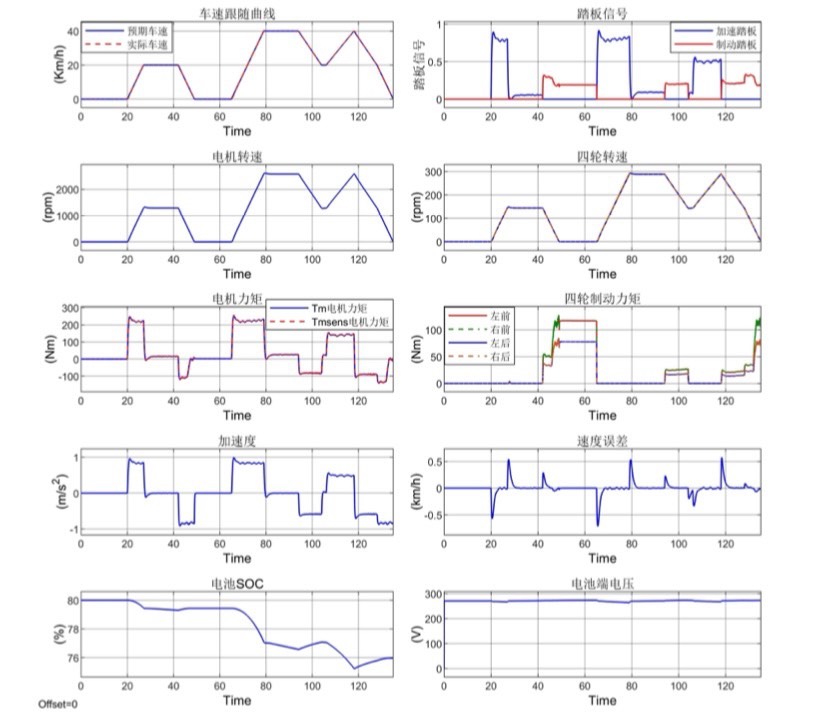
首先,再生制动系统是一种能够在车辆减速或制动时,将原本会被浪费的动能转化为电能,并将其储存回电池中的系统。这种技术不仅可以提高车辆的能效,还能延长续航里程,同时减少对传统摩擦制动系统的依赖。
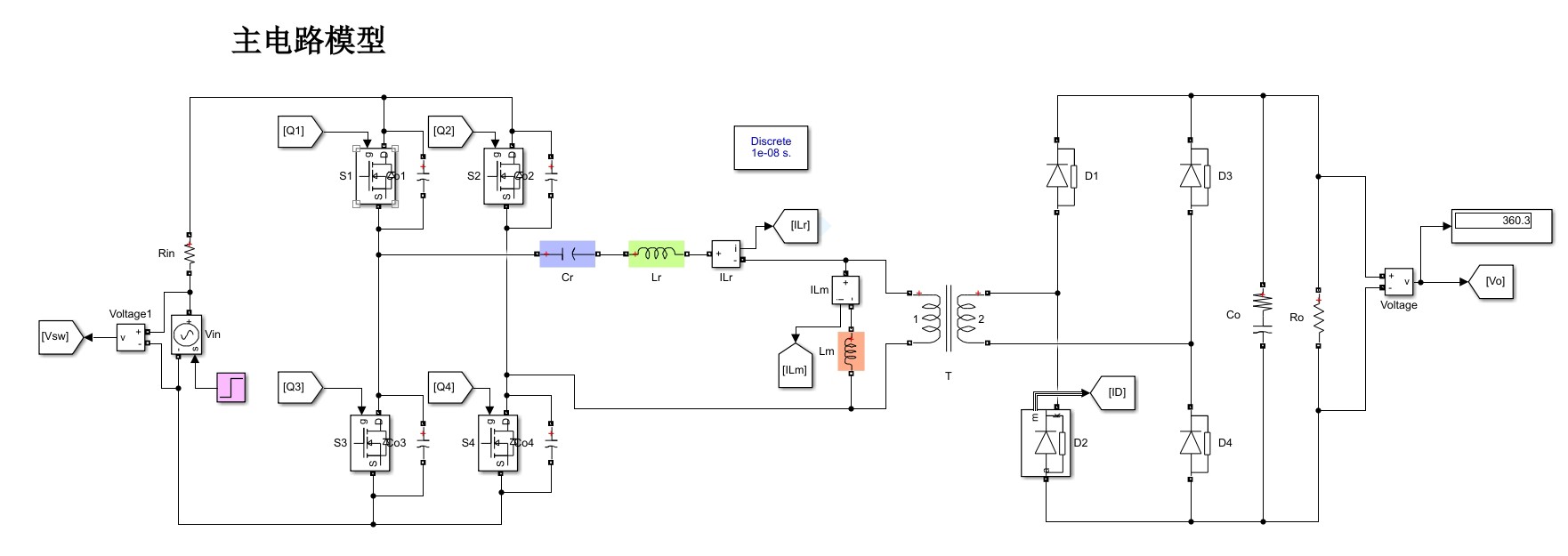
全桥LLC谐振变换器变频-移相混合控制仿真。[1]参考文献:《全桥LLC谐振变换器的混合式控制策略_李菊》拓宽电压范围。保证mos管的ZVS零电压开通和二极管的ZCS零电流关断。[2]模式切换:①当输入<输出电压时,变换器处于升压模式,采用变频控制模式,,②当输入>输出电压时,变换器处于降压模式,采用定频模式也就是移相模型。[3]具体策略如下:当输入电压较低时,采用变频控制,变换器满占空比工作,通
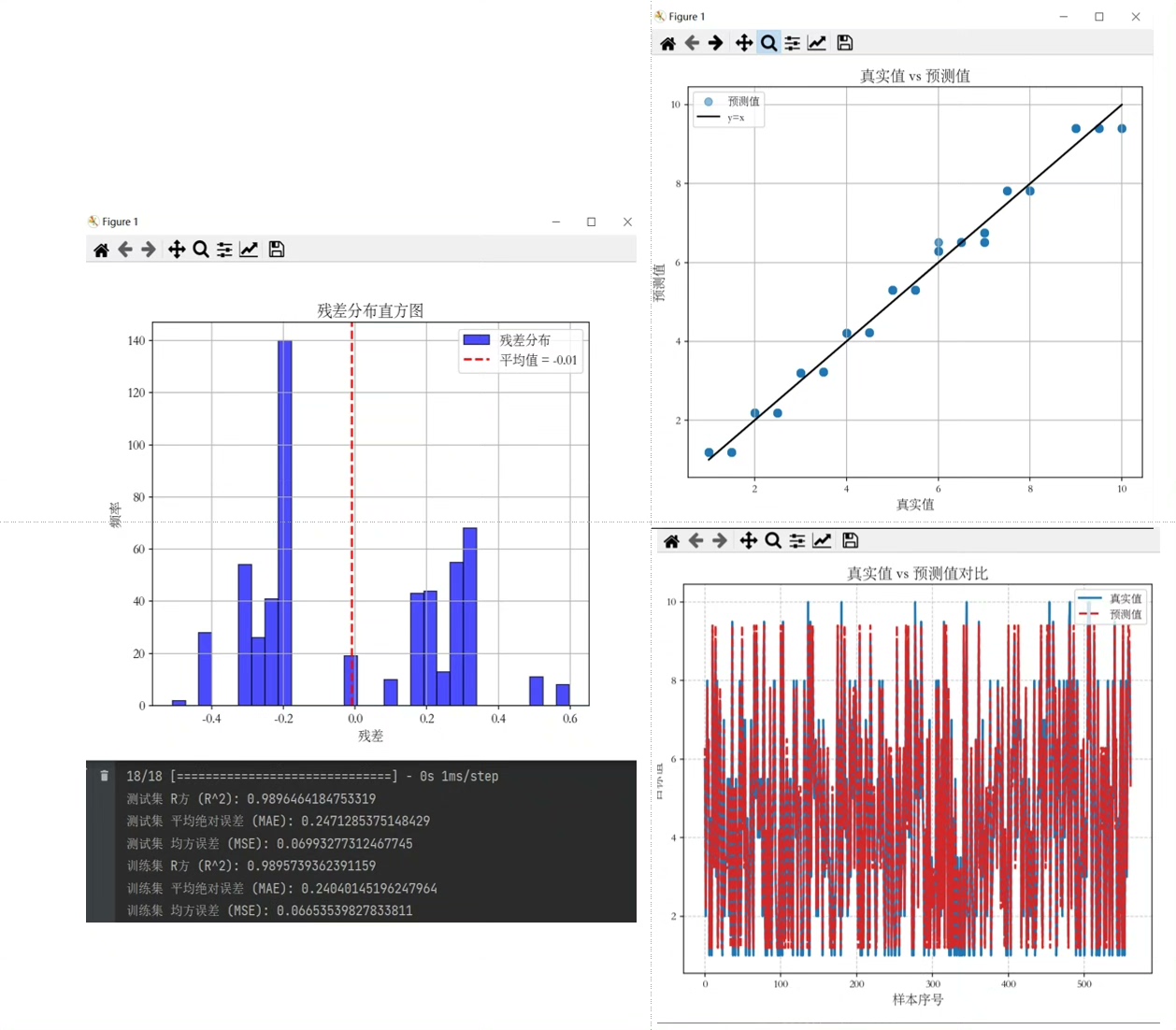
基于LSTM-AdaBoost长短期记忆网络结合AdaBoost多输入单输出回归预测python代码1.输入多个特征,输出单个变量,多变量回归预测;2.data为数据集,excel数据,前6列输入,最后1列输出,运行主程序即可,所有文件放在一个文件夹;3.命令窗口输出R2、MSE、MAE多指标评价;4.可视化: 通过使用Matplotlib,代码提供了可视化工具,用于评估模型性能,包括真实值与预测
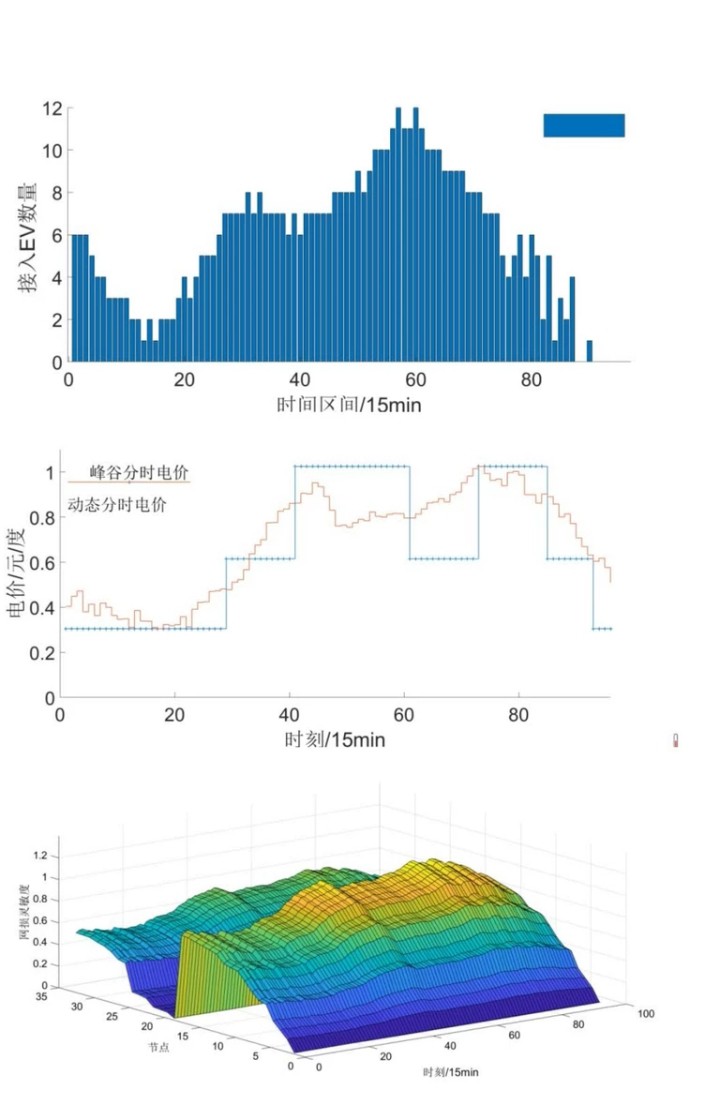
MATLAB代码:基于V2G技术的电动汽车实时调度策略关键词:电动汽车 实时调度 V2G 网损参考文档:《基于V2G技术的电动汽车实时调度策略》基本复现仿真平台:MATLAB YALMIP+CVX主要内容:代码主要做的是基于V2G技术的电动汽车实时调度策略,请注意是实时调度策略而非日前调度策略,首先以降低充电成本和网损成本为目标,建立电动汽车调度模型。然后通过构建网损灵敏度指标分析电网节点性能,基
1.开发环境Win10Unity 2020.3.24f1c2MRTK 2.7.xVS 2019HoloLens 22.下载Unity官方步骤注意点:添加Universal Windows Platform Build Support和Windows Build Support (IL2CPP)模块3.下载MRTK使用MRFT导入官方步骤4.项目配置官方步骤注意点:官方步骤Unit 4 of 8的C
1.手势应用以及修改(就是说手势显示在HoloLens里面时的状态,同时可以在设置里修改)2.光标修改
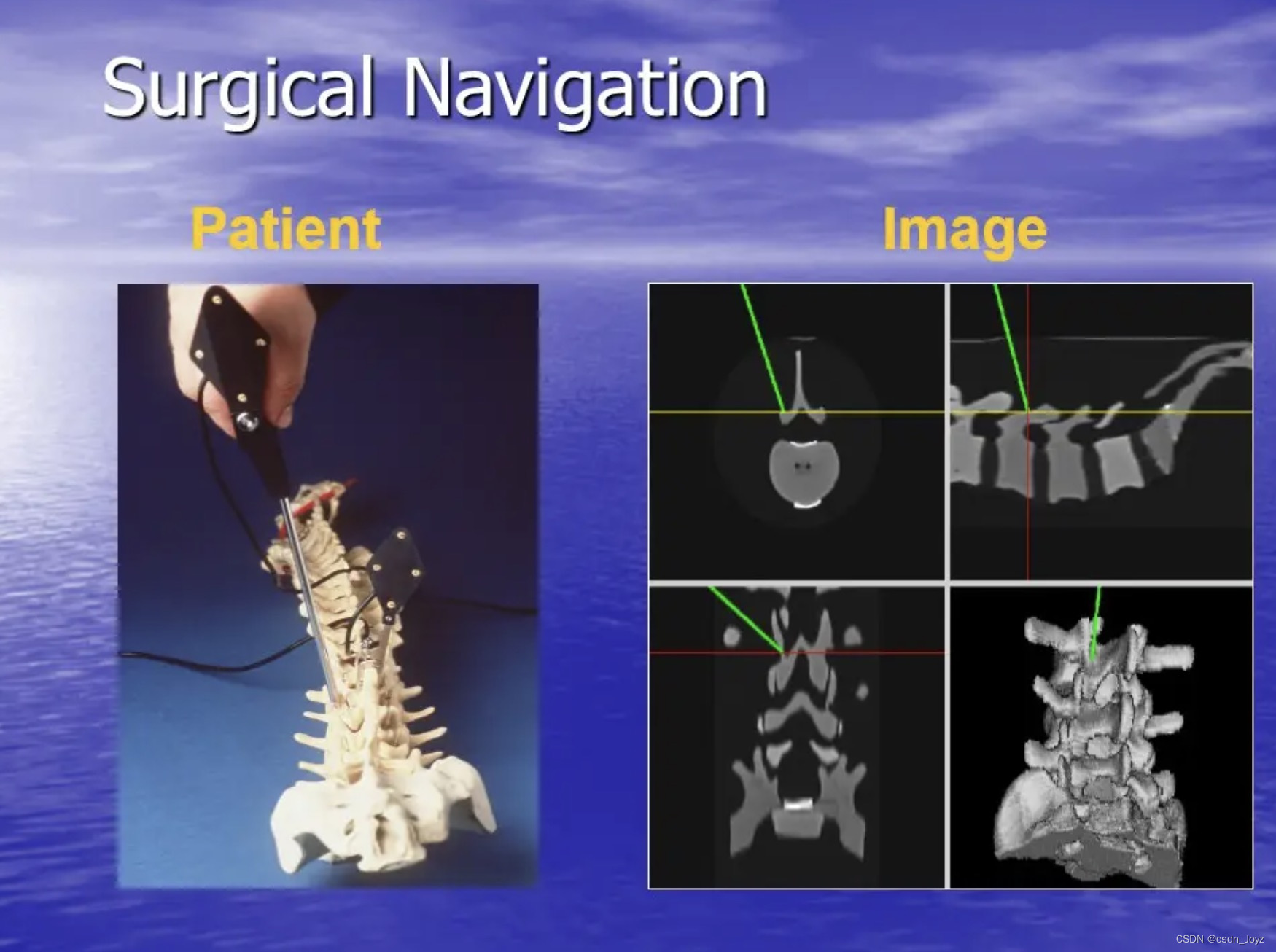
使用Unity 2021.3.4在Hololens2上进行MPR(多平面三维重建)的一次尝试,使用了fo-dicom库。
window平台使用lama_factory Qlora微调qwen2.5-3B-instruct实践
人工势场法的核心思想是把机器人在环境中的运动想象成在一种虚拟的力场中移动。就好比在一个充满了引力和斥力的世界里,目标点会对机器人产生引力,吸引它靠近;而障碍物则会产生斥力,把机器人推开。通过合力的作用,机器人就能规划出一条避开障碍物到达目标的路径。
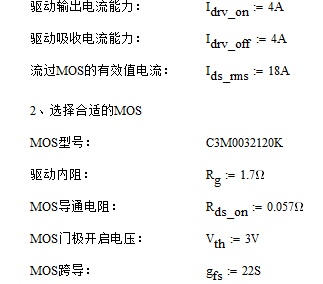
TMS320F28377这个双核DSP芯片算是控制核心里的顶配了,毕竟处理PWM波形和实时反馈这种既要速度又要精度的活儿,没点硬实力还真搞不定。这个看似简单的公式在实际应用中要处理瞬态热阻抗的积分运算,这时候Excel计算模板的优势就出来了。特别是处理LLC谐振拓扑时,用附赠的软件输入Q值和特征阻抗,三秒就能出谐振点参数,比手算靠谱多了。双向逆变器充电器原理图资料,TMS320F28377芯片的
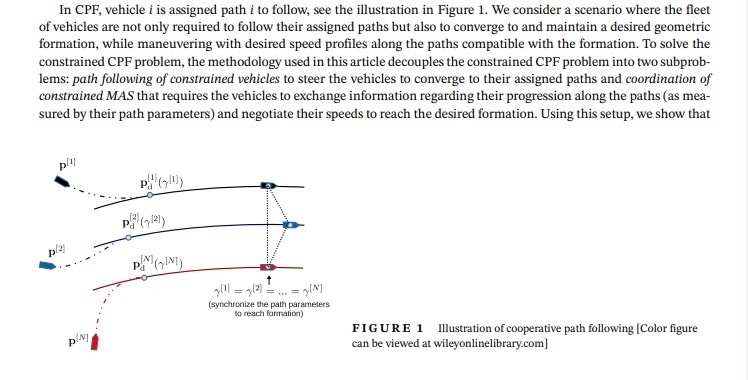
理论严谨:严格遵循“路径跟踪+多智能体协同”双层架构,确保稳定性与收敛性;工程实用:显式处理输入约束、通信延迟,事件触发机制适用于低带宽场景;可视化完善:提供3D动画与专业结果图,方便算法验证与论文撰写;扩展性强:支持多种智能体类型、编队形式与通信拓扑,可快速适配不同应用场景。代码可直接用于无人船、无人车等多智能体编队控制的仿真验证,也可作为实际系统开发的基础框架。无人船编队 无人车编队 MPC
注意:如果MR上测试麦克风输入后得到的音频音量很小,环境声音会覆盖人输入的声音,可以买个type-c麦克风插在MR上。准备试下Hololens上的MicStream的麦克风输入的,结果卡在了MR上这部分的DLL缺失问题。讯飞的离线中文语音是安卓版本的,思路就是MR上发送需要转文字的语音数据到服务器上,然后服务器往安卓(离线中文语音)上发送这段语音数据,在安卓上进行转文字后再返回给服务器,服务器发给
事件触发控制代码,每个代码有对应参考文献1.多智能体中基于事件触发的协议2.多智能体分布式系统的事件触发控制3.基于观测器的非理想线性多智能体事件触发的跟踪一致性4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制5.固定拓扑和切换多智能体分布式动态事件触发控制6.线性多智能体全分布式事件触发协议算法7.有限时间约束下的分布式事件触发控制方法在多智能体系统的研究领域,事件触发控制是一个相当热
New Scene。
在过去几十年中,人类的饮食行为发生了巨大的变化。传统的早餐-午餐-晚餐模式已被频繁的小吃、夜间大餐和不吃早餐所取代。这种不规律的饮食模式可能对心血管代谢疾病风险产生不利影响,如肥胖、胰岛素抵抗、高血糖症、2型糖尿病等。间歇性禁食已被越来越多的人认为是一种有前途的治疗心血管代谢疾病(CMD)的方法。一些神经科学家认为,我们的身体已经进化到能够不吃东西几个小时,甚至几天。进食时机和频率可以一定程度上改
极客头条」—— 技术人员的新闻圈!CSDN 的读者朋友们好,「极客头条」来啦,快来看今天都有哪些值得我们技术人关注的重要新闻吧。整理 | 苏宓出品 | CSDN(ID:CSDNnews)
1.添加眼球跟踪2.添加语言命令
Hololens入门之在线中文识别实现中文语音问答由于Hololens中目前不支持中文语音识别,所以使用Bing Speech 的 STT 及 TTS 来实现中文语音转中文文本,及 中文文本转中文语音的流程。该方案需要连接网络。以下项目使用Bing Speech API, Bot Framework, LUIS 实现在Hololens端应用内的中文语音问答流程。整体架构如下:
最近想让Hololens中获取电脑中更新的数据,打算使用套接字的方式进行通信,明明在unity中模拟测试可以进行正常通信,但是将软件部署到HoloLens上通信总是失败,找了很久的原因,找了很久的原因,终于能够正常通信了,下面将一些踩坑的点放到这里,供诸位开发者们参考。4、 Windows Defender中高级设置中心设置一下项目编辑器的入站规则,允许其在网络上进行通信,很重要的坑。2、Holo
问题:Jenkins:Unity批处理模式构建成功-构建文件夹为空 我有一个新的 Jenkins 从站设置,我调用 Unity CLI 使用我的自定义构建方法进行构建: touch holo-build.log if ! "$UNITY_APP" -projectPath "$WORKSPACE" \ -buildTarget WindowsStoreApps \ -executeMethod "
问题:错误“调用的对象已与其客户端断开连接” - 使用 python 和 win32com 自动化 IE 8 我想自动化 Internet Explorer 8(在 Windows 7 上使用 python 2.7)机器。这是我在在 SO上找到的帖子之后的代码: import sys, time from win32com.client import WithEvents, Dispatch im
[](https://res.cloudinary.com/practicaldev/image/fetch/s--zB0nx0Y3--/c_limit%2Cf_auto%2Cfl_progressive%2Cq_auto%2Cw_880/https://fleek-team-bucket. storage.fleek.co/thumbnails-blog/ENS%2520-%2520Introd
hololens
——hololens
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 乐奇 Rokid 开放社区
乐奇 Rokid 开放社区



 AI Agent技术社区
AI Agent技术社区
 脑启社区
脑启社区
 腾讯云开发者社区
腾讯云开发者社区












 AtomGit开源社区
AtomGit开源社区
 AI硬件创业社区
AI硬件创业社区


 魔乐社区
魔乐社区



 2048 AI社区
2048 AI社区






 松山湖开发者村综合服务平台
松山湖开发者村综合服务平台

 CSDN学习社区
CSDN学习社区



 广州城市开发者社区
广州城市开发者社区

 CI/CD
CI/CD
 Python
Python

 开源
开源
