- @2504_94303751
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通过C#联合Halcon,我们可以很方便地实现各种图像处理功能。虽然C#不是Halcon的“原生”语言,但通过.NET库,我们依然可以发挥Halcon的强大功能。代码写起来也不复杂,关键是要理解Halcon的API和图像处理的基本原理。如果你也在做类似的项目,希望这些代码和分析能给你一些启发。当然,Halcon的功能远不止这些,大家可以根据自己的需求去探索更多的功能。

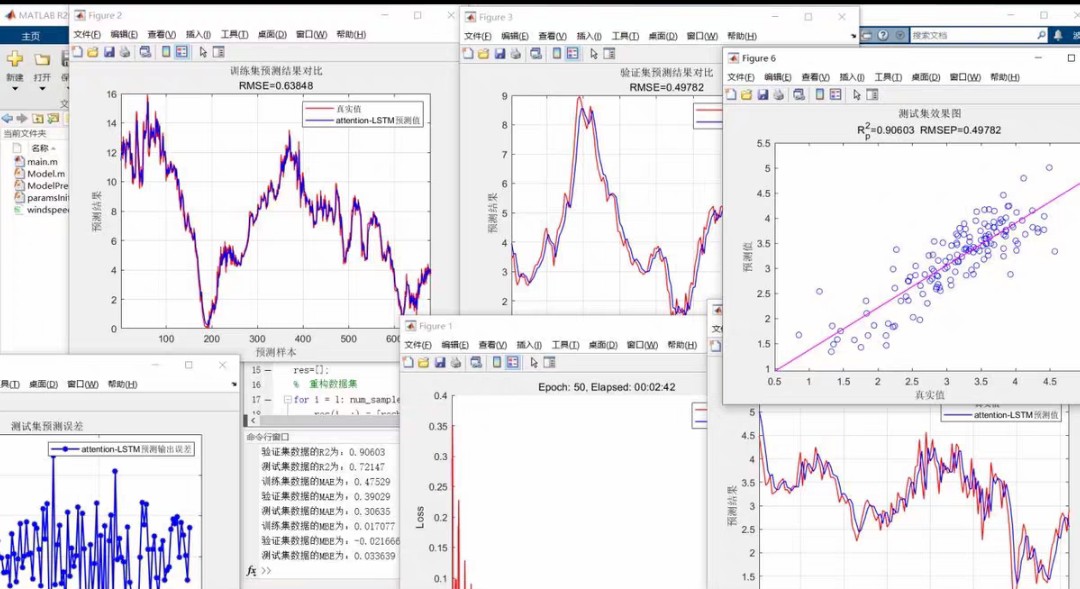
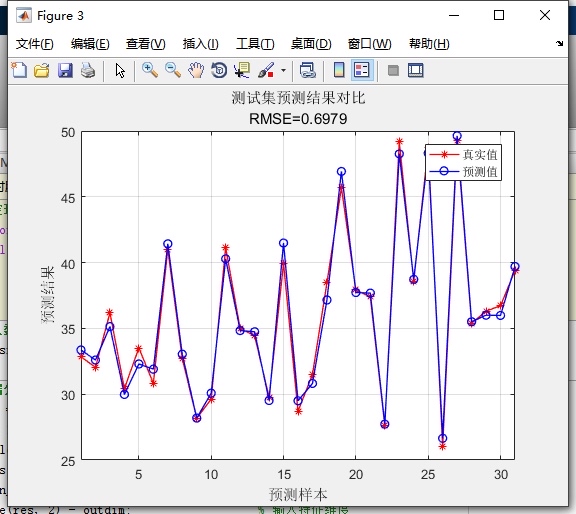
跑完代码如果发现预测曲线像心电图,试试这三板斧:加大LSTM层数、调整注意力维度、增加训练轮次。注意机制有个隐藏福利——可视化注意力权重,能清楚看到模型在哪些时间点"走神"了。这种组合模型特别适合有周期性波动但又存在异常波动的数据,比如电力负荷预测、股票价格波动分析。下次遇到时序难题,不妨让Attention-LSTM帮你"擦亮眼睛"找关键。试试这个能让模型自动"划重点"的Attention-LS
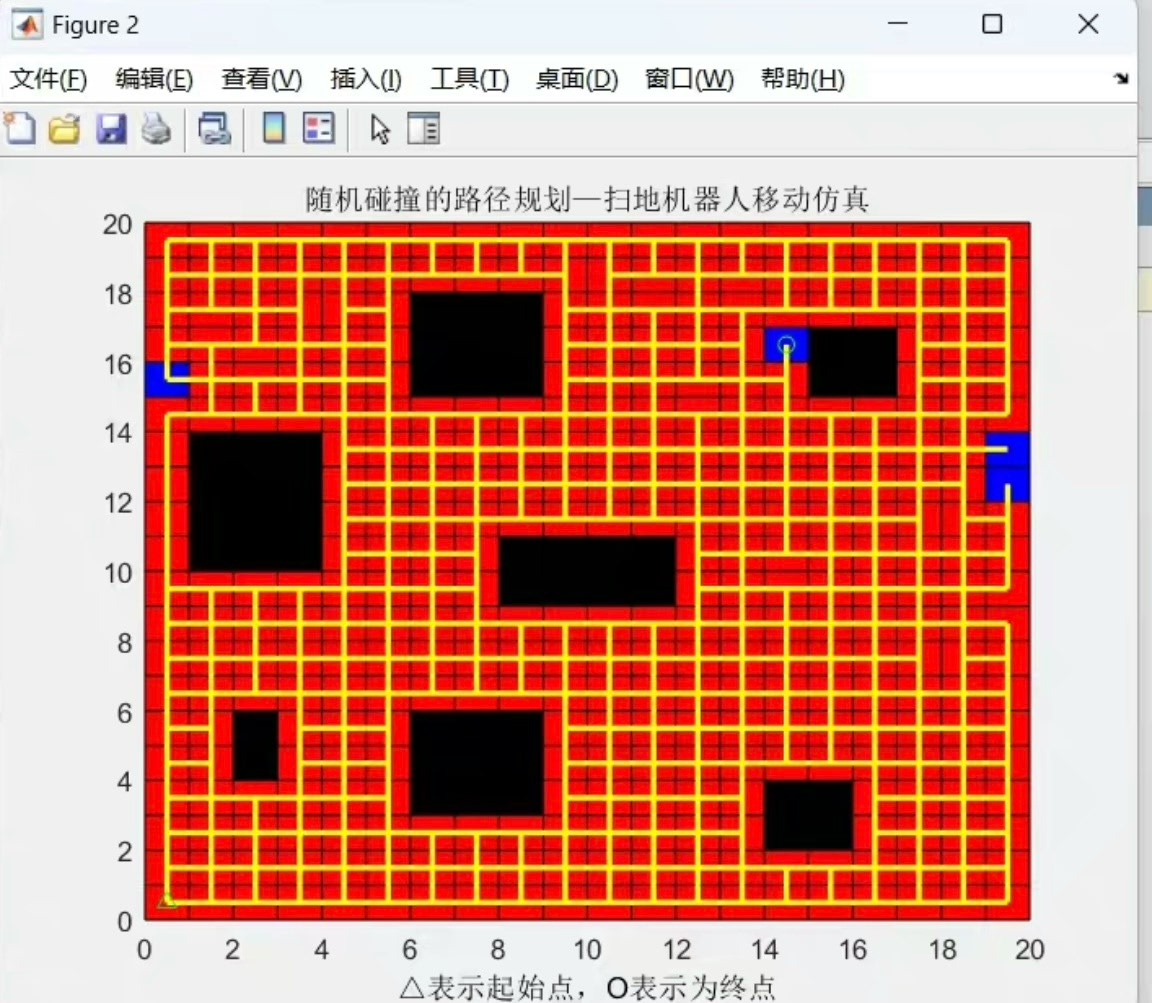
AGV全覆盖移动避障路径规划扫地机器人路径规划第一类算法 全覆盖智能算法%% 基于深度优先搜索算法的路径规划—扫地机器人移动仿真% 返回深度优先搜索实现全覆盖的运行次数% 将栅格模型的每一个栅格看成一个点% 实际中栅格模型是连续的,在计算机处理时看作离散的% 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态第二对比算法%% 随机碰撞的路径规划—扫地机器人移动仿真% 返回深度优先搜
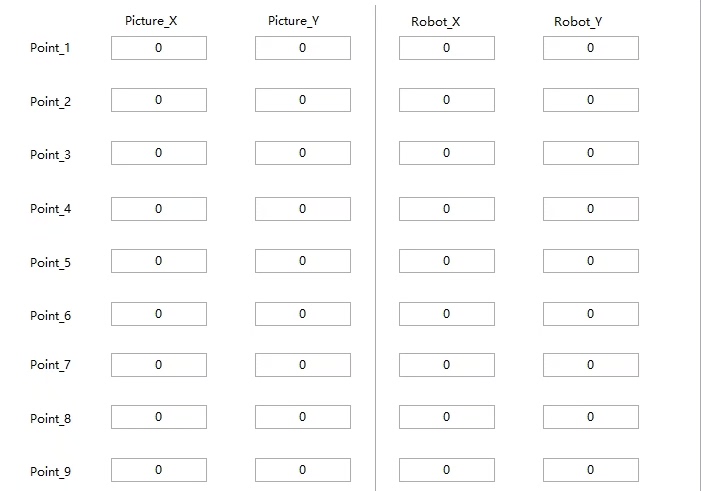
物料双相机联合定位偏移标定+坐标统一计算提高定位精度在工业自动化领域,物料的精准定位至关重要。双相机联合定位系统能够借助两个相机从不同角度获取物料信息,进而更准确地确定物料位置。然而,要实现高精度定位,偏移标定与坐标统一计算这两个关键环节必不可少。
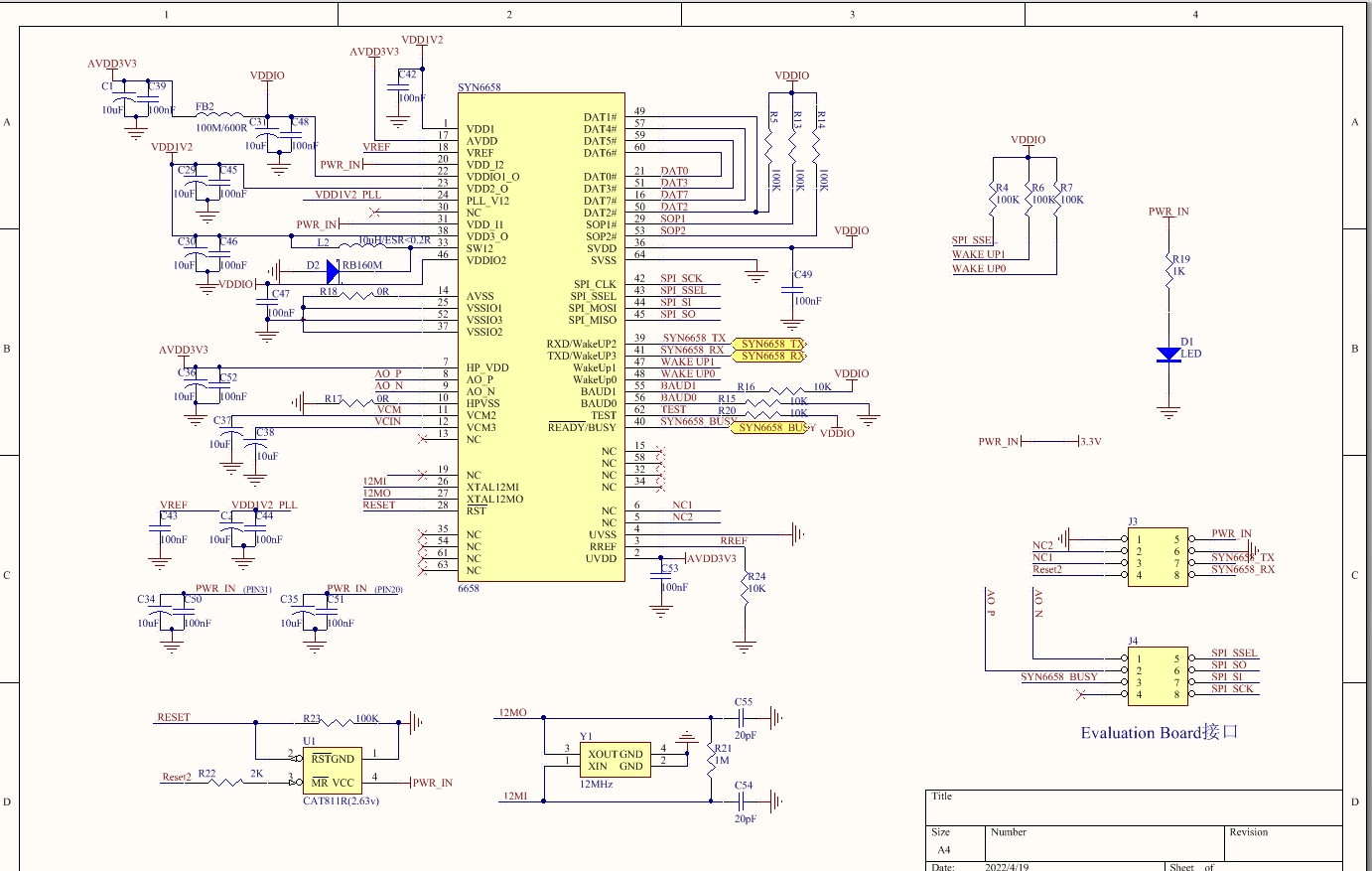
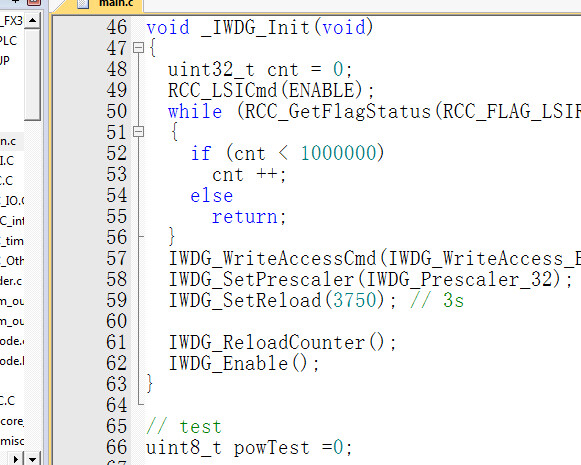
用STM32的GPIO口模拟PLC的输入输出时,特别要注意输入通道的上拉配置。FX3U 45MR 21DI 24RO 14AD 2DA源代码,stm32f103芯片全套源码,可以直接用GX Works2编程直接写入,经济实惠,非常适合参考学习。FX3U 45MR 21DI 24RO 14AD 2DA源代码,stm32f103芯片全套源码,可以直接用GX Works2编程直接写入,经济实惠,非常适合
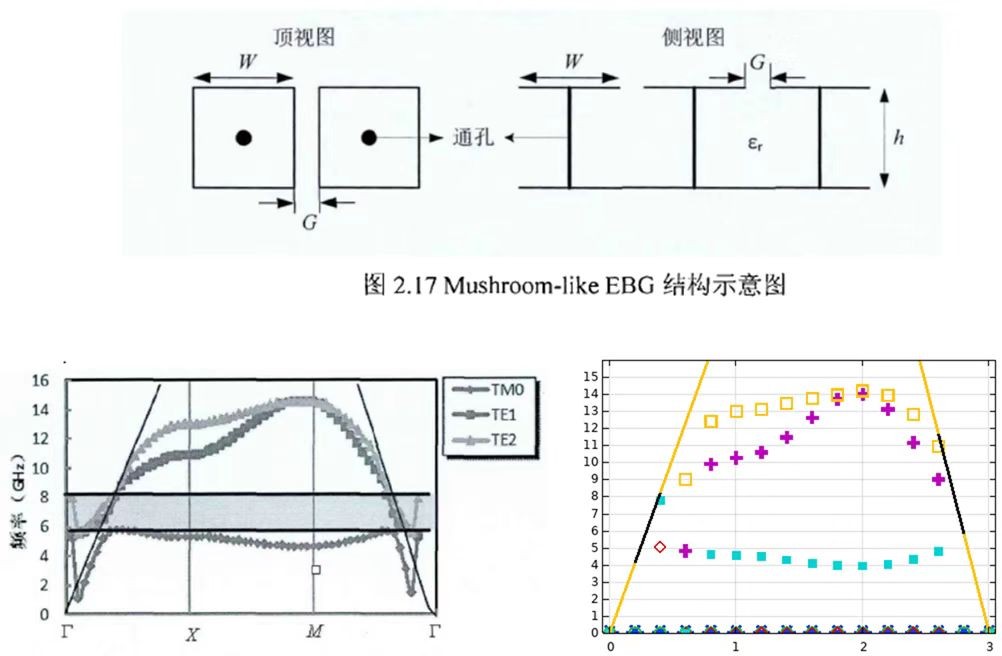
在玩COMSOL电磁带隙结构仿真的时候,最烦人的就是算完能带图突然冒出来几条鬼畜的伪模式线——它们像电线杆上的小广告一样顽固,严重影响判断。搞定这些套路后,再去看能带图——那些曾经张牙舞爪的伪模式就像被拔了网线的键盘侠,彻底安静如鸡。当然,遇到特别顽固的可以祭出终极大招:把仿真结果和平面波展开法对照,保准让假货无所遁形。记得在特征频率研究中勾选"搜索附近频率",把基频估算值设为c/2a(a是晶格常
移植的时候注意FX3U的PID指令是自带整定功能的,但需要把采样周期参数改成实际值的1/3左右才能稳定。代码里用了两个定时器接力捕获,实测能识别从1200到115200的所有常用速率。最近在翻仓库的时候发现之前做的FX3U控制器方案还能用,配套的STM32F103源码也挺有意思。FX3U源代码,stm32f103芯片全套源码,可以直接用works2编程直接写入,经济实惠,非常适合参考学习。FX3U
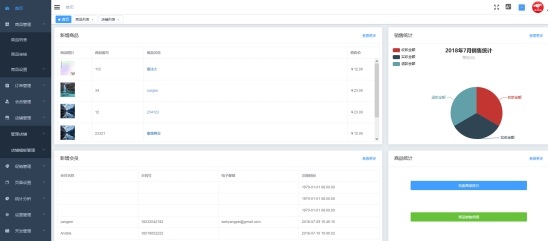
比如商户端登录模块的密码传输居然没走HTTPS(好在他们用了BCrypt加密),还有消息队列的消费者没做幂等处理,这些二次开发时需要自己补上。总体来说,这套代码适合想研究高并发电商系统实战的兄弟,特别是SpringCloud微服务落地的姿势比那些培训班项目硬核多了。最近在GitHub发现个挺有意思的Java版电商系统javaShop,这玩意儿把B2B2C的复杂场景玩得挺溜。作为常年混迹电商项目的码
ELM回归预测 黏菌优化极限学习机回归预测粒子群优化算法优化极限学习机pso-elmMatlab 代码狼群优化极限学习机gwo-elm黏菌优化极限学习机sma-elm麻雀优化极限学习机ssa-elm鲸鱼优化极限学习机woa-elm更多优化算法可加好友可定制在机器学习领域,回归预测是一个重要的任务,而极限学习机(ELM)因其学习速度快、泛化性能好等优点,备受关注。
在 STM32 等 Cortex-M 系列 MCU 上,高效、可移植、低功耗的数字信号处理(DSP)能力是绝大多数健康监测、语音识别、运动控制应用的“刚需”。本文以“人体健康监测系统”中实际调用的基础数学函数为线索,系统梳理 CMSIS-DSP 基础数学子模块(BasicMathFunctions)的设计思想、功能划分、数据通道及性能权衡,帮助开发者快速定位所需函数并理解其背后的实现哲学,而无需逐