- @2502_94431433
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
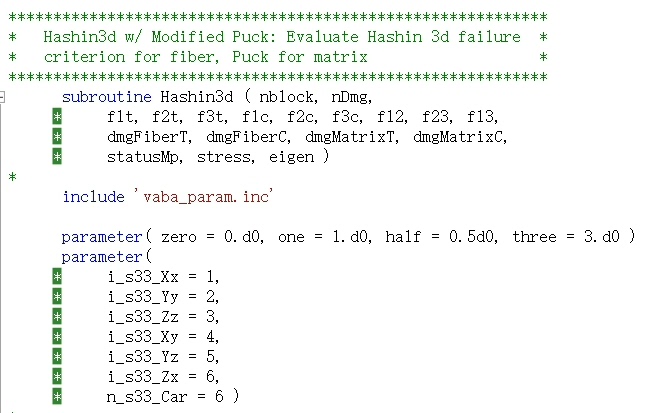
后来用了个笨办法——在子程序里加调试输出,把每个积分点的应力分量和损伤标志写入文本,再用Python脚本可视化,立马发现问题所在。这里有个骚操作——Puck准则里的等效应力计算用了sig22_eff处理压应力情况,相当于给压应力加了权重。注意损伤变量d1和d2的耦合方式,特别是剪切项的双重折减。实践中发现如果漏掉(1-d1)*(1-d2)这个乘积项,剪切刚度会过早退化,整个应力场直接崩给你看。做损
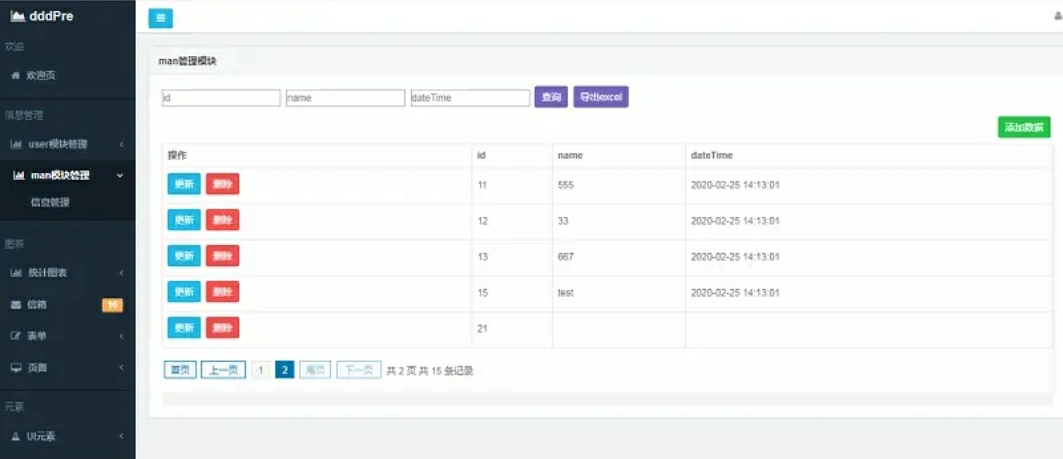
代码生成器,SpringBoot,SpringCloud代码生成器此代码生成器为本人倾心打造,通过简单的配置便可以生成想要的系统,主要用于提升开发效率,秒杀后台管理系统,可生成权限管理模块,实现按钮级别的权限控制!也可自定义生成模块,做到功能的持续集成,支持多数据源模式,多库操作简单上手。目前生成器后台支持SSM,SpringBoot,SpringCloud框架,生成的代码结构层次清晰,简明易懂。
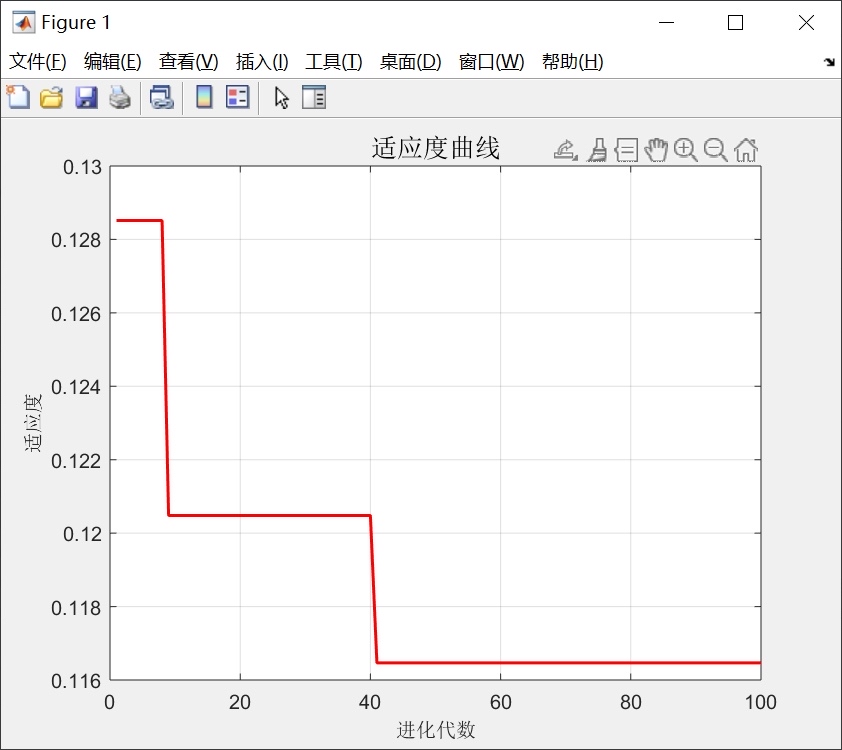
% 用最优参数训练最终模型% 7:3拆分训练集和测试集,别用交叉验证的那部分数据当测试集,作弊就没意思了% 计算隐藏层输出% 求解输出权重fprintf('最终测试集准确率:%.4f\n', test_acc);我用iris数据集跑的时候,普通ELM的测试准确率大概在88%-92%之间波动,用这个PSO-HELM之后稳定在95%以上,而且每次跑的结果都差不多,再也不用看运气了。
• 写操作异步清缓存(Redis Set 结构,Key=userId,Value=houseId 集合),缓存失效时间 5 min,读场景直接命中。• 若房源已下架或删除,实时过滤,并在返回 DTO 中打标“invalid=true”,前端置灰即可,不自动删除记录(留给离线任务定期清理)。• 使用 INSERT …
Function Calling让AI从"聊天机器人"升级为"行动派助手"——它打破了"AI只能聊天"的局限,让自然语言真正成为操控数字世界的万能遥控器。现在你已经理解了Function Calling的基本概念,下一章我们将亲手搭建第一个实战项目:零代码天气查询机器人!你会发现,这个看似高大上的技术,其实比用手机APP还要简单。这就是Function Calling的核心——告诉AI你有什么能力
建议在关键位置加调试绘制,比如用红色小十字标出实际点击的物理坐标,这招救过我无数次。在树形控件里显示图层时,别忘了实现INotifyPropertyChanged接口,这样勾选可见性时能自动重绘。实测发现当数据量超过1万点时,直接GDI+绘制会卡成PPT,得用顶点缓冲对象优化,不过那是后话。这个缩放变换矩阵有意思,线宽用1f/zoomLevel反向调节,保证放大时线条不会过粗。要是哪天想升级成JS
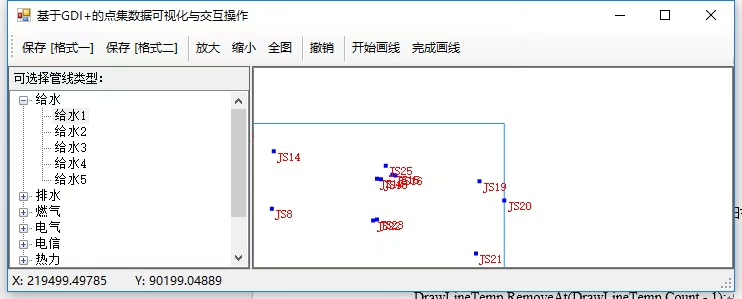
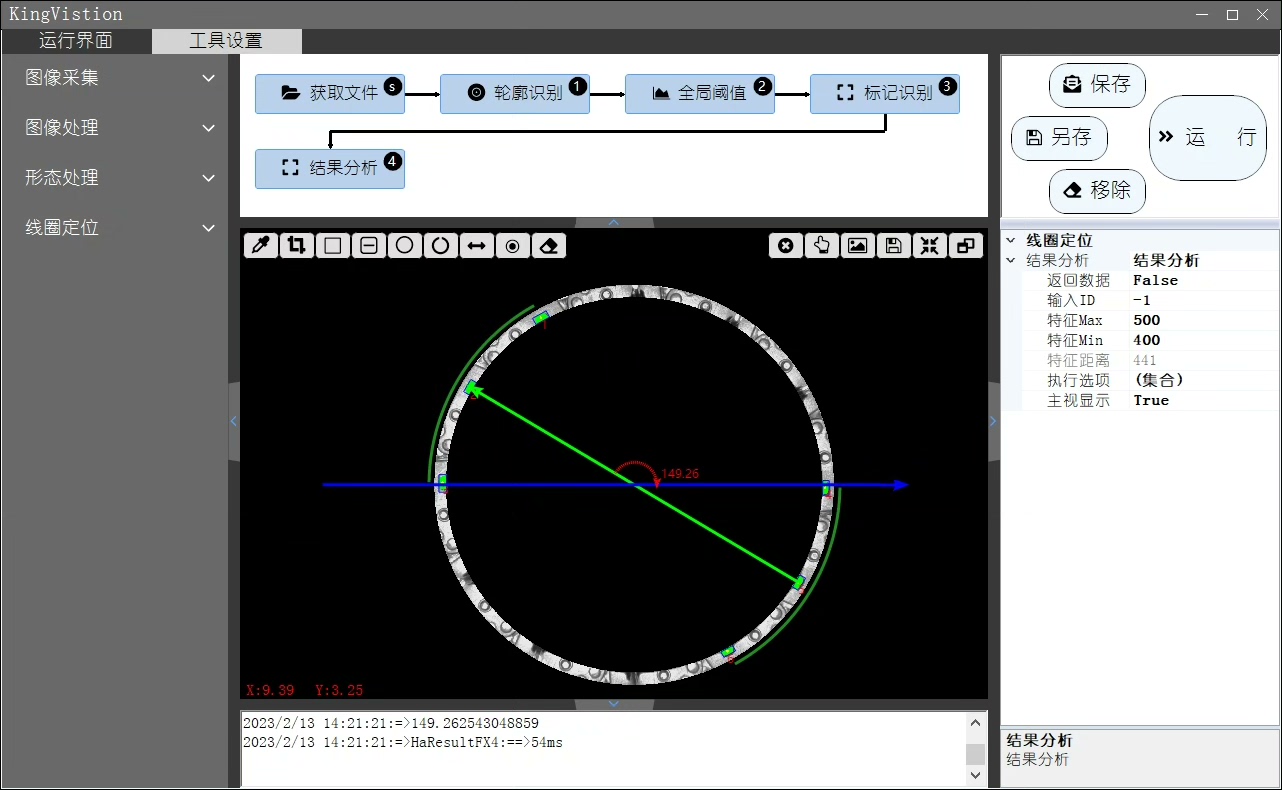
工业场景中的上位机开发总带着点"脏活累活"的气质——既要跟底层PLC掰手腕,又要伺候好花里胡哨的UI界面。去年在汽车厂做零件质检系统时,产线老张头看着我的调试界面直摇头:"小伙子,你这界面还没老王的VB6程序看着顺眼呢!现在遇到视觉项目选型,我的经验是:预算够、要交货快的选Halcon,想秀操作或需要定制化的选OpenCV。产线上的PLC有时候跟便秘似的,数据分好几次才能拉干净,传统的固定超时经常
该上位机系统是一个功能完备、设计精良的工业通信工具。它不仅实现了与台达 PLC 的基础数据交互,更通过实时可视化、灵活订阅和性能监控等高级特性,为工程师提供了强大的调试和监控能力。其清晰的模块化设计和对 NModbus 库的高效运用,也为同类工业软件的开发提供了优秀的实践范例。

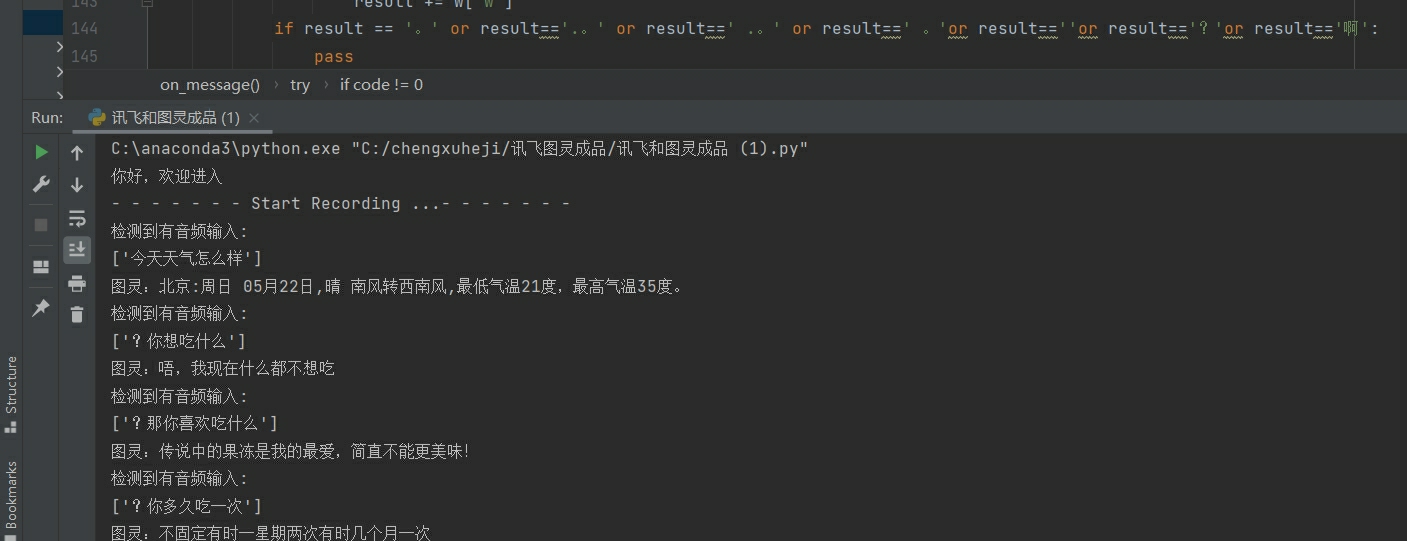
代码虽然不长,但全是实战中摔出来的经验,比教科书上的demo强十八条街。今天给大家分享一个自制的语音识别工具,这玩意儿能实时把你说的话转成文字,还带可视化界面。别看功能挺唬人,核心代码也就三百来行,但里面埋了不少实战技巧,尤其适合想搞语音交互又怕踩坑的朋友。更绝的是用线程锁保证界面更新不出错,不然多个线程同时操作文本框能给你整出灵异事件。python 程序,语音识别文字 做了报错,多线程处理,加了
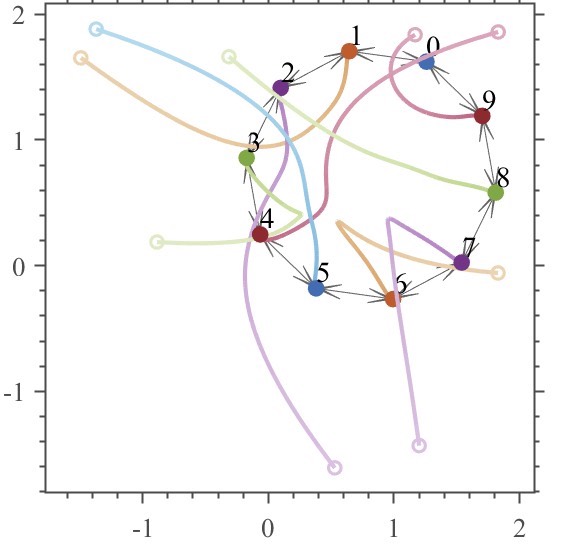
多机器人 智能体编队matlab多机器人编队代码共整理5个1.基于图论法 matlab2.基于距离和方位的多智能体编队全局渐近稳定分布控制 matlab3.一致性领航跟随编队(攻防)matlab4.基于拓扑图与领航跟随的编队控制 matlab5.一致性编队多机器人编队控制总能让工程师们两眼放光——毕竟谁不想让一群机器人走出整齐划一的队形呢?今天咱们直接上硬菜,扒开五种MATLAB实现的编队算法代码