- @2508_94198873
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Matlab肺结节分割(肺结节提取)源程序,也有GUI人机界面版本。使用传统图像分割方法,非深度学习方法。使用LIDC-IDRI数据集。工作如下:1、读取图像。读取原始dicom格式的CT图像,并显示,绘制灰度直方图;2、图像增强。对图像进行图像增强,包括Gamma矫正、直方图均衡化、中值滤波、边缘锐化;3、肺质分割。基于阈值分割,从原CT图像中分割出肺质;4、肺结节分割。肺质分割后,进行特征提取
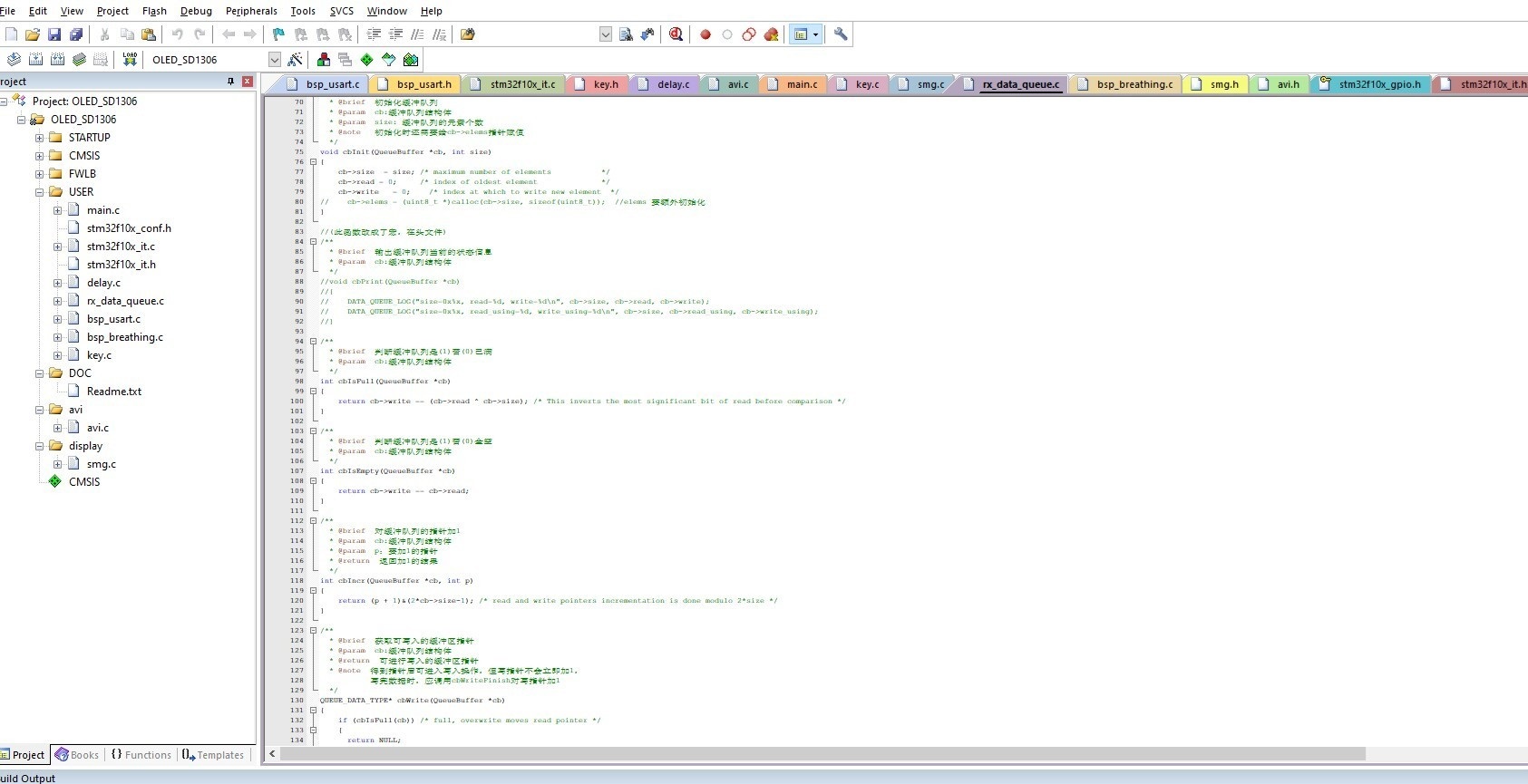
今天,我们就来聊聊如何在STM32上实现一个高效的环形串口队列程序,确保大数据量的串口收发能够稳定运行。首先,我们需要明确的是,串口通信的核心问题在于数据的接收和发送。对于大数据量的处理,传统的线性队列往往无法满足实时性的要求,因为数据在队列中的移动会消耗大量的CPU时间。最后,需要注意的是,环形队列的大小需要根据实际的应用场景进行调整。该程序为大数据量吞吐的串口收发例程,中断接收,边收边发,采用
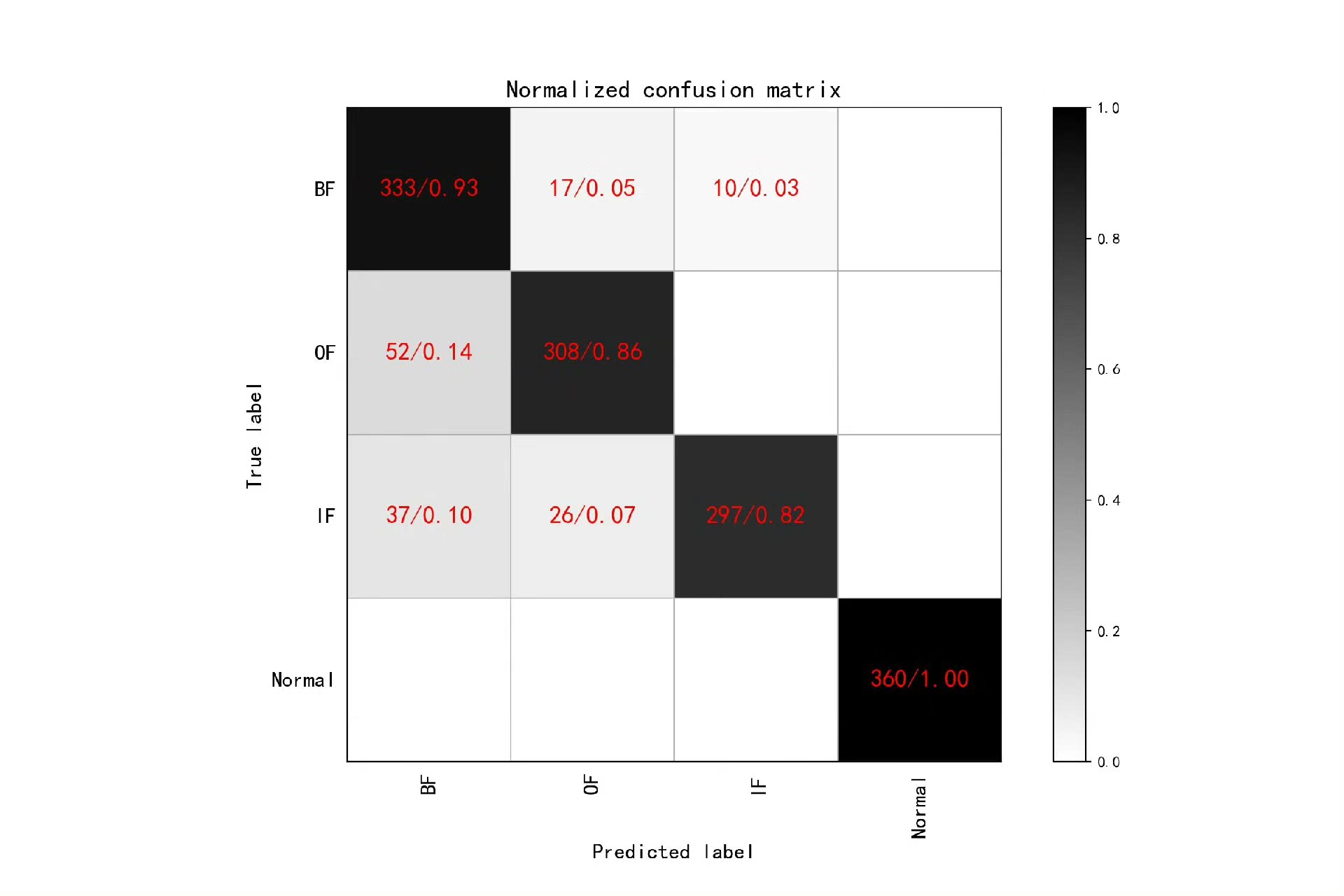
多尺度一维卷积神经网络(MS-1DCNN),西储大学故障诊断识别率为97.5%(验证集)以上适用于刚上手故障诊断的同学,就是从数据处理,到最后出图可视化完整一套流程,看完这个会对故障诊断流程有个清晰认识。前20轮用0.01的激进学习率冲锋,之后每20轮衰减十倍,像开降落伞一样平稳落地。整个流程走下来,你会发现故障诊断其实就是数据变形记——把振动信号搓圆捏扁,直到故障特征自己举手投降。你会发现内圈故
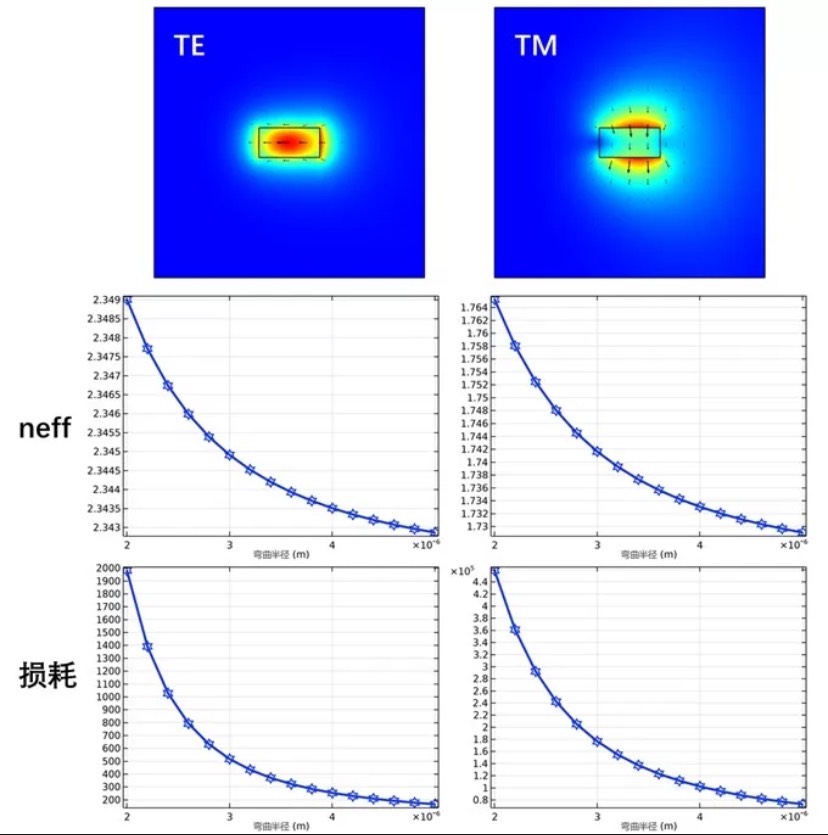
弯曲波导在集成光学里是个绕不开的话题,尤其是做硅光或者光子集成电路的朋友,谁还没被那该死的弯曲损耗折磨过呢?今天咱们就撸起袖子,用Comsol整一波弯曲波导的模式分析,顺便把有效折射率和损耗计算的门道摸清楚。先跑个参数化扫描,找到网格尺寸对neff的影响曲线,选个结果收敛的尺寸就行。这时候可能会发现neff的虚部是负值——别慌,这其实是Comsol的相位约定导致的,取绝对值就对了。最后丢个冷知识:
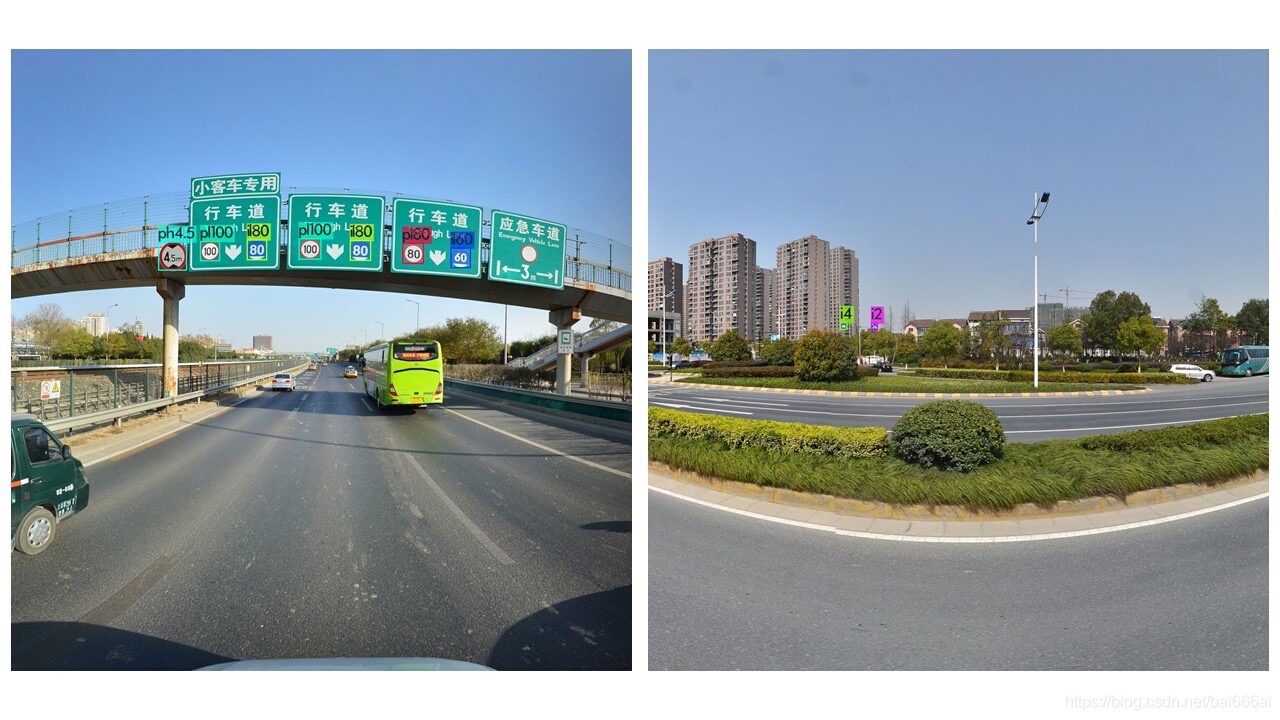
完整代码已经扔在Github上了,需要定制模型的朋友记得改config.yaml里的参数,别直接硬撸源码。交通标志识别这事儿听起来简单,实际落地时踩的坑比马路上的减速带还多。先说说数据集处理这个老大难问题——原版TT100K数据集有221个小类,但实际应用中"前方学校"和"注意儿童"这种标志根本不需要细分。深度学习交通标志识别,数据集+源码+界面系统 ,对TT100K数据集做了类别清洗,将属于同一
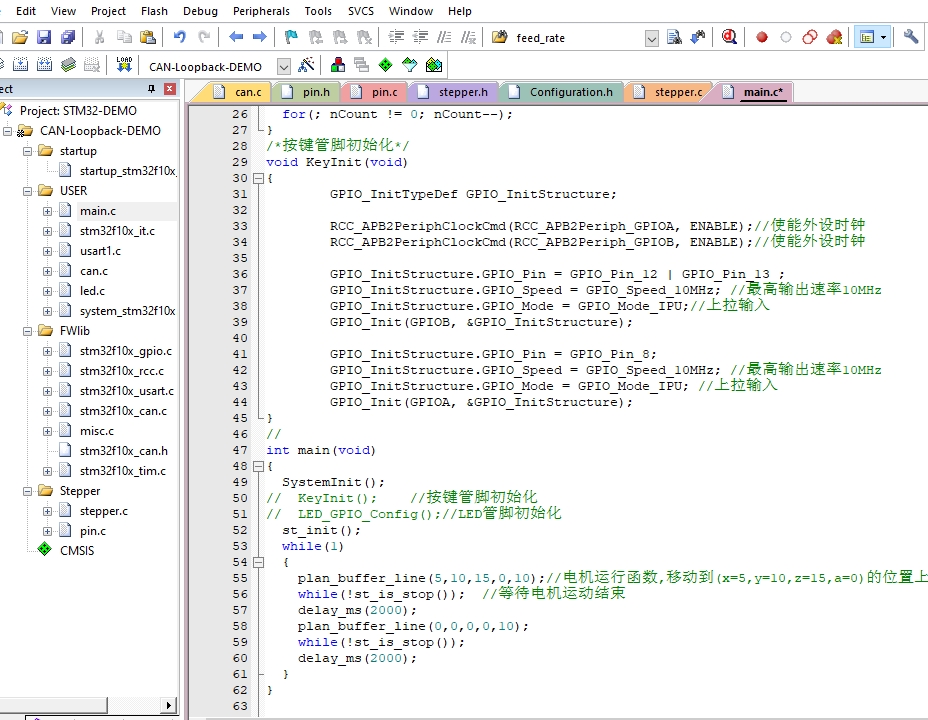
stm32f103c8步进电机的脉冲控制,有详细的算法说明,梯形加减速实时计算,算法来之avr446手册,自己写的,mdk直接编译,还写了word说明文档,算法清晰,项目中验证过,支持启动方向设置,支持min max限位开关,支持限位开关极性设置,支持jog点动模式,还有速度更快的升级算法。完整工程在Github(假装有链接),MDK工程直接编译,Word文档里连示波器抓的波形图都贴好了。这个方案
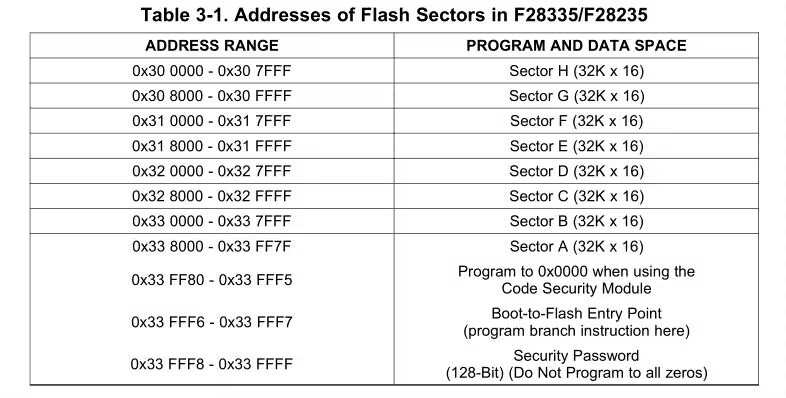
总体包括两部分,基于ccs6.1.3的下位机工程;调试时用CCS的Memory Browser眼看着App区的代码被意外覆盖,最后发现是CMD文件中RAM到Flash的映射地址没做偏移补偿。原本以为移植个IAP功能就是改改跳转地址的事,结果发现从HEX文件解析到双机通信全是坑,实验室的示波器都快被我盯出火星子了...用LabVIEW解析Intel Hex文件时发现,标准VI库里的解析模块处理283
有次偷懒用了自动划分,结果局部网格长宽比超过20:1,温度场直接报错不干了。这货额定功率80kW,铁芯材料用的50JW470硅钢片,转子结构是经典的V型磁钢排列。注意时间步长要同步,不然就像我同事那样——电磁场用0.1ms步长,温度场用1s步长,结果温升曲线抖得像心电图。这里有个坑要注意:Maxwell的坐标系默认是右手螺旋,设置绕组相位的时候得盯着转子初始位置。Maxwell电机模型,电机设计,
视觉滤波跟踪算法三部曲之ECO_HC跟踪 , 超越ECO,ECO_HC跟踪算法降维部分原来HOG+CN的42维特征降到13维,其他部分类似,实验结果ECO-HC超过了大部分深度学习方法,而且论文给出速度是CPU上60FPS。本商品提供c++工程实现代码源码,非调用opencv算法接口,及比较详细的安装编译说明文档。在CPU上跑出60FPS的视觉跟踪算法你见过吗?ECO_HC这个老六算法当年可是把深
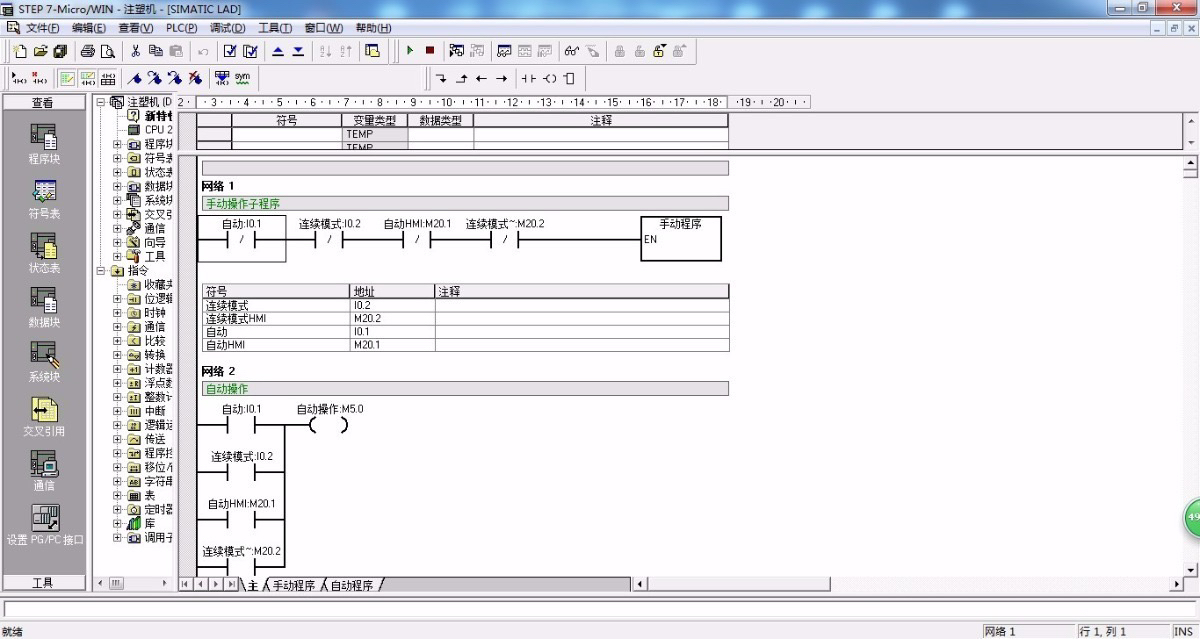
今天咱们直接上干货,拿S7-200 PLC和组态王搭的注塑机控制系统开刀,从接线到梯形图,从IO分配到组态画面,把工业控制的裤衩都给扒干净了看。最后说个血泪教训:接线时千万把PE端接瓷实了,上次有个兄弟地线虚接导致Q0.2输出飘忽不定,电磁阀跟抽风似的乱跳,整个注塑件出模时直接喷出来,场面堪比爆破现场...|--|/|--(MOV)---|//同时清零注射速度设定值。|--|/|--(RST)--