- @yTfDRlpl
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
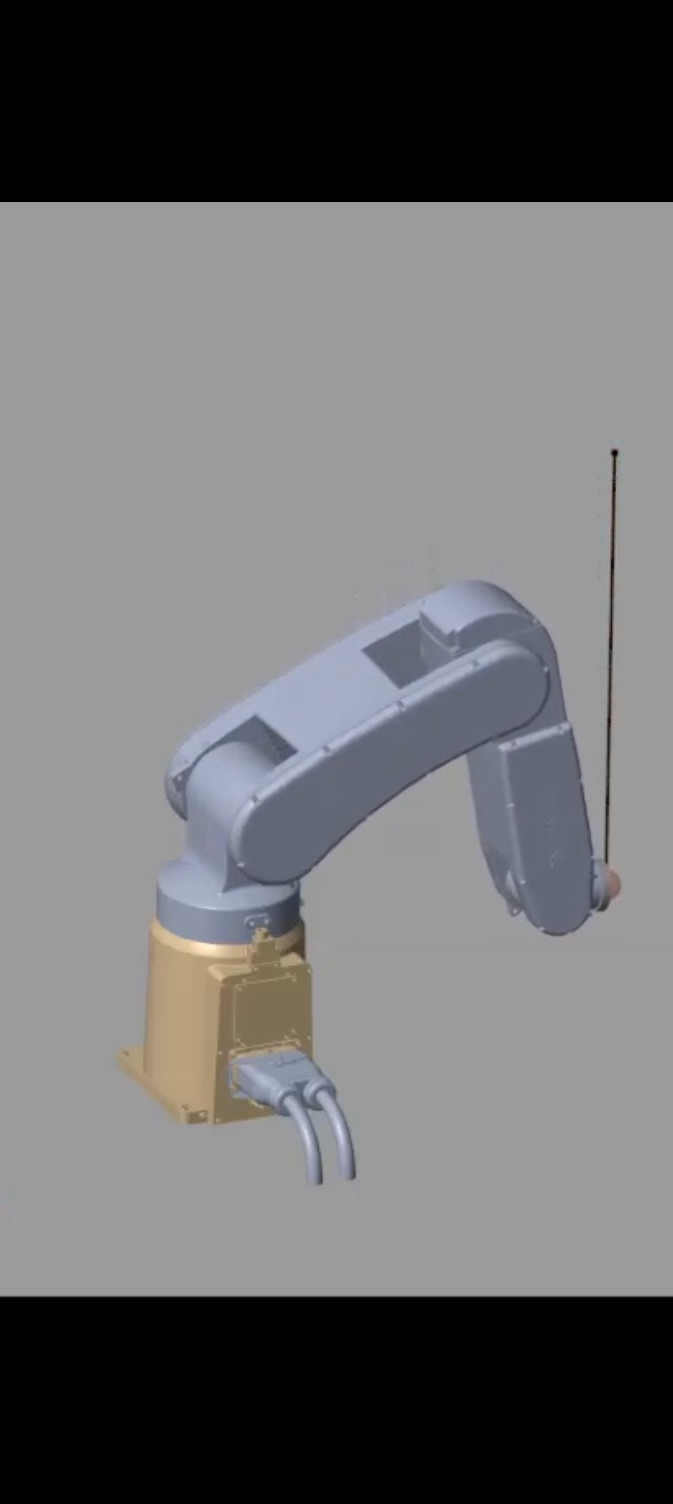
前三轴旋转关节负责平面运动,第四轴直线关节专攻上下移动,这组合在3C电子装配线上简直是劳模。第三关节的1标记说明这是个平移关节,别傻乎乎用旋转关节的建模方式。最后在Simscape里连上电机模型,看着三维动画中机械臂行云流水地画圆,顿时觉得调参时掉的头发都值了。记住,别迷信高级算法,SCARA这种快枪手,有时候PD控制加前馈就能跑出骚操作。六轴,scara机器人运动学分析,建模和运动控制。六轴,s
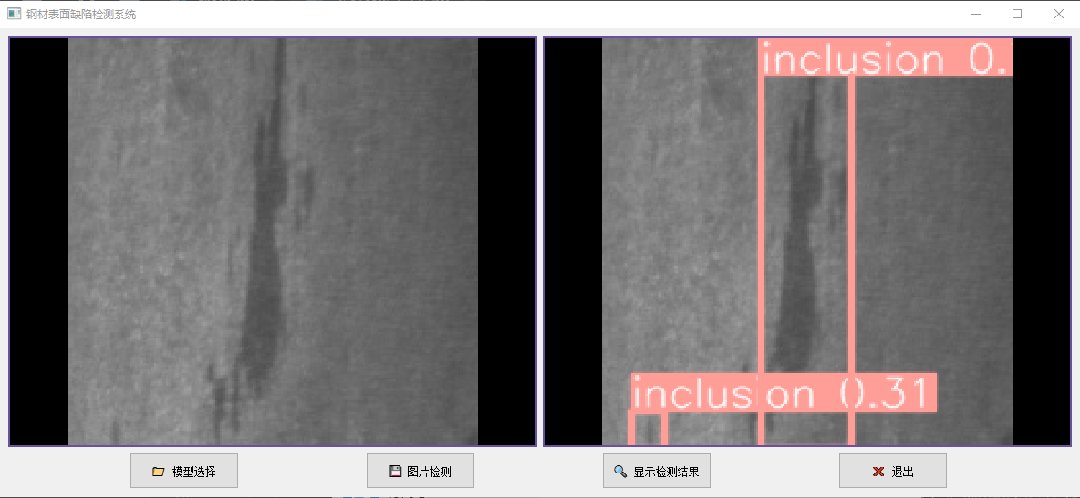
该数据集共有 1800 张图片,包括:开裂(Crazing, Cr)、夹杂物(Inclusion, In)、斑点(Patches, Pa)、点蚀表面(Pitted_Surface, PS)、轧制氧化皮(Rolled-in_Scale, RS)、划痕(Scratches, Sc)等 6 种不同的缺陷。最后说个实战经验——遇到扎堆的小瑕疵时,把输入分辨率从640提到1280,虽然速度掉到80ms,但划
需要源码的老铁直接私,价格透明没套路,部署文档写得比大多数开源项目都详细。今天推荐个刚上线的PHP资产管理系统,基于layuimini框架二次开发,特别适合中小型团队的固定资产管理。部署比想象中简单,PHP环境装好之后,把数据库配置扔到config目录就能跑。PHP资产管理系统,适用于IT办公行业固定资产及设备管理源码,基于layuimini开源框架,需要的联系我,标价即实价。PHP资产管理系统,

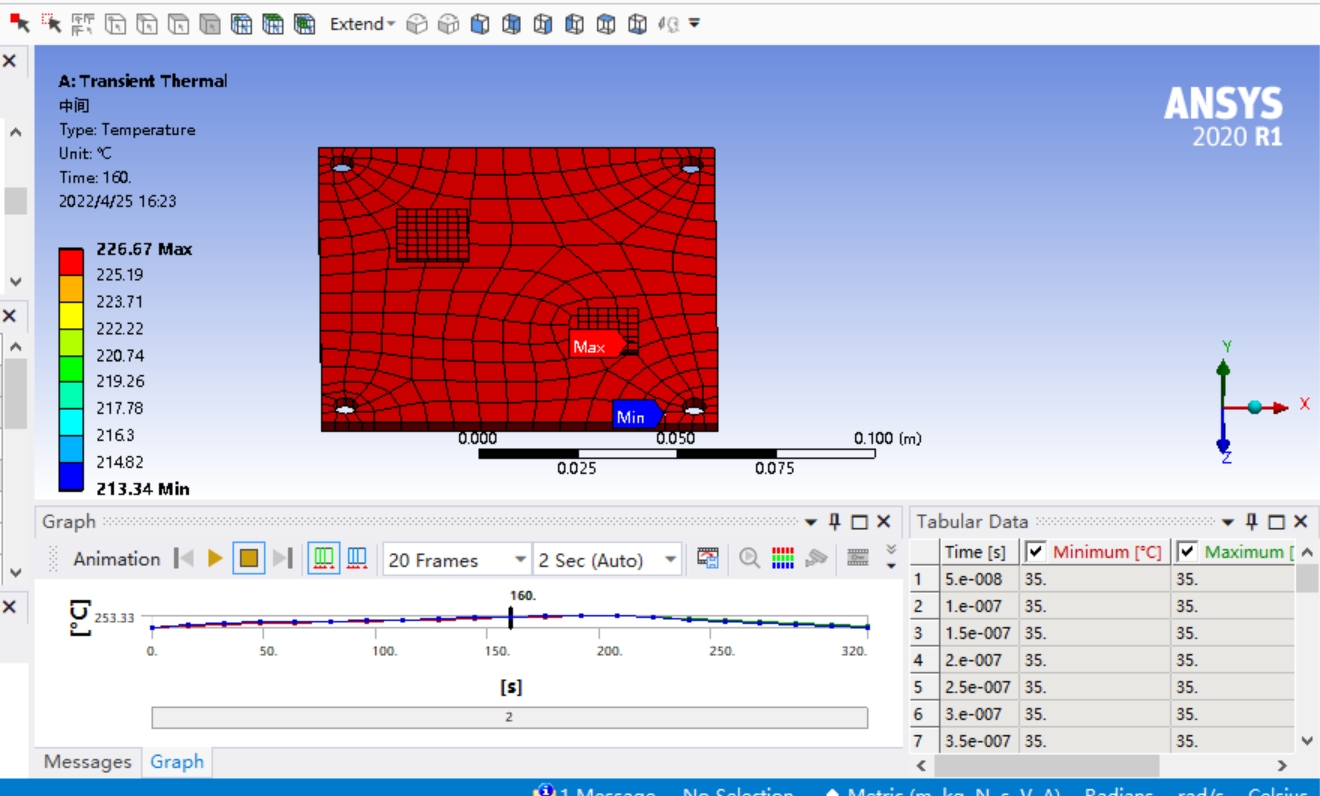
为此,团队以 ANSYS Workbench 为底座,自研一套“回流焊-温度循环”全自动热力耦合框架(以下简称本框架)。该框架通过模板化工程数据、脚本化流程驱动、参数化模型与耦合场数据自动传递,实现从炉温曲线到焊点疲劳寿命的一键式评估,显著缩短迭代周期(由 3-4 周降至 2-3 天)。本框架将“回流焊-温度循环”两大可靠性工况纳入同一数据链路,通过模板化、脚本化、参数化的设计,把繁琐的手工操作压
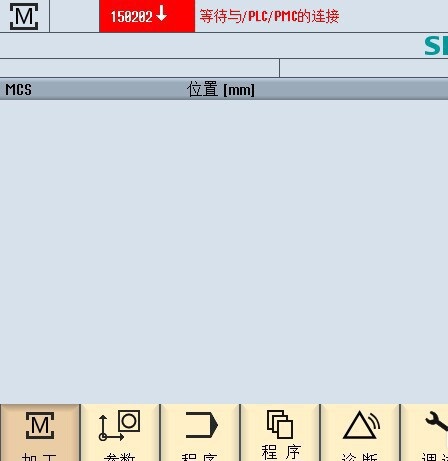
把库卡给的GSDML-V2.3-KUKA-PN-20190312.xml扔进去,这时候设备目录里就能看到KUKA机器人选项了。用Wireshark抓包发现PLC疯狂发诊断请求,最后在机器人配置里把Profinet看门狗时间从默认2s改成5s,世界安静了。库卡机器人与西门子PLC通讯案例中文版,有配置资料,库文件可以拿来直接用,也可以参考借鉴学习研究,送相关手册资料。库卡机器人与西门子PLC通讯案例

进一步,分析了微网运营商与用户聚合商间的博弈关系,提出共享储能背景下微网运营商与用户聚合商间的 Stackelberg 博弈模型,并证明Stackelberg 均衡解的存在性与唯一性。进一步,分析了微网运营商与用户聚合商间的博弈关系,提出共享储能背景下微网运营商与用户聚合商间的 Stackelberg 博弈模型,并证明Stackelberg 均衡解的存在性与唯一性。主要内容:代码主要做的是基于主从
LSTM多变量时序预测,基于长短期记忆网络(LSTM)的多变量时间序列预测输入数据为Excel格式,程序已经调试好,无需更改代码替换数据集即可运行1、运行环境要求MATLAB版本为2019及其以上2、评价指标包括:R2、MAE、MSE、RMSE等,符合您的需要3、代码文注释清晰,质量极高4、测试数据集,可以直接运行源程序。替换你的数据即可用 适合新手小白在数据科学和机器学习领域,时间序列预测一直是
GRU是一种高效的门控循环神经网络,主要用于处理序列数据。它通过门控机制(遗忘门和更新门)来控制信息的流动,从而缓解长期依赖问题。门控机制:控制信息的输入和输出循环状态:存储当前时间步的信息注意力机制是一种基于加权的组合方式,可以动态地关注序列中的不同时间步特征。通过注意力权重,模型可以更好地捕捉长距离依赖关系,提高预测性能。注意力机制的核心在于学习权重,这些权重决定了每个时间步对当前预测的贡献程
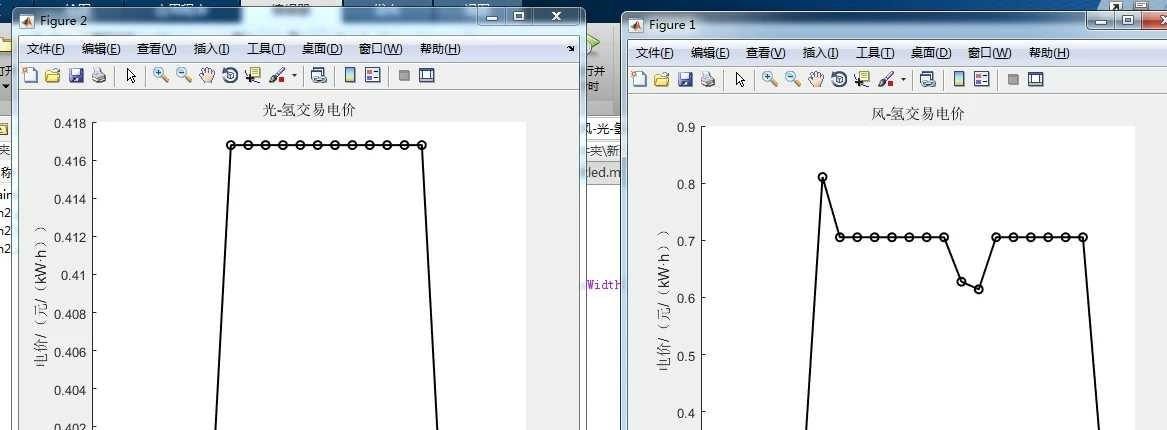
主要内容:代码主要做的是一个基于合作博弈的风光氢能源交易的问题,首先,考虑主体间的电能交易建立各主体的优化运行模型, 然后基于纳什谈判理论建立风–光–氢多主体合作运行模型, 接着将其等效为联盟效益最大化和电能交易支付谈判两个子问题,运用交替方向乘子法提出上述两个子问题的分布式求解方法,求解效果非常好,店主已经对代码进行了深入的加工和处理,出图效果非常好。优势:代码具有一定的深度和创新性,注释清晰,
这代码看着糙但特管用,每天自动按日期建文件夹备份,比软件自带的备份功能还省心。5、可以连接840D(PLC编程电缆连接,编程电缆要正规西门子品牌,否则能连plc,不一定能连此软件)的NCU、也可以连接840DSL(网线连接)的NCU。5、可以连接840D(PLC编程电缆连接,编程电缆要正规西门子品牌,否则能连plc,不一定能连此软件)的NCU、也可以连接840DSL(网线连接)的NCU。1、软件可