- @HJHoMFoavQSO
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
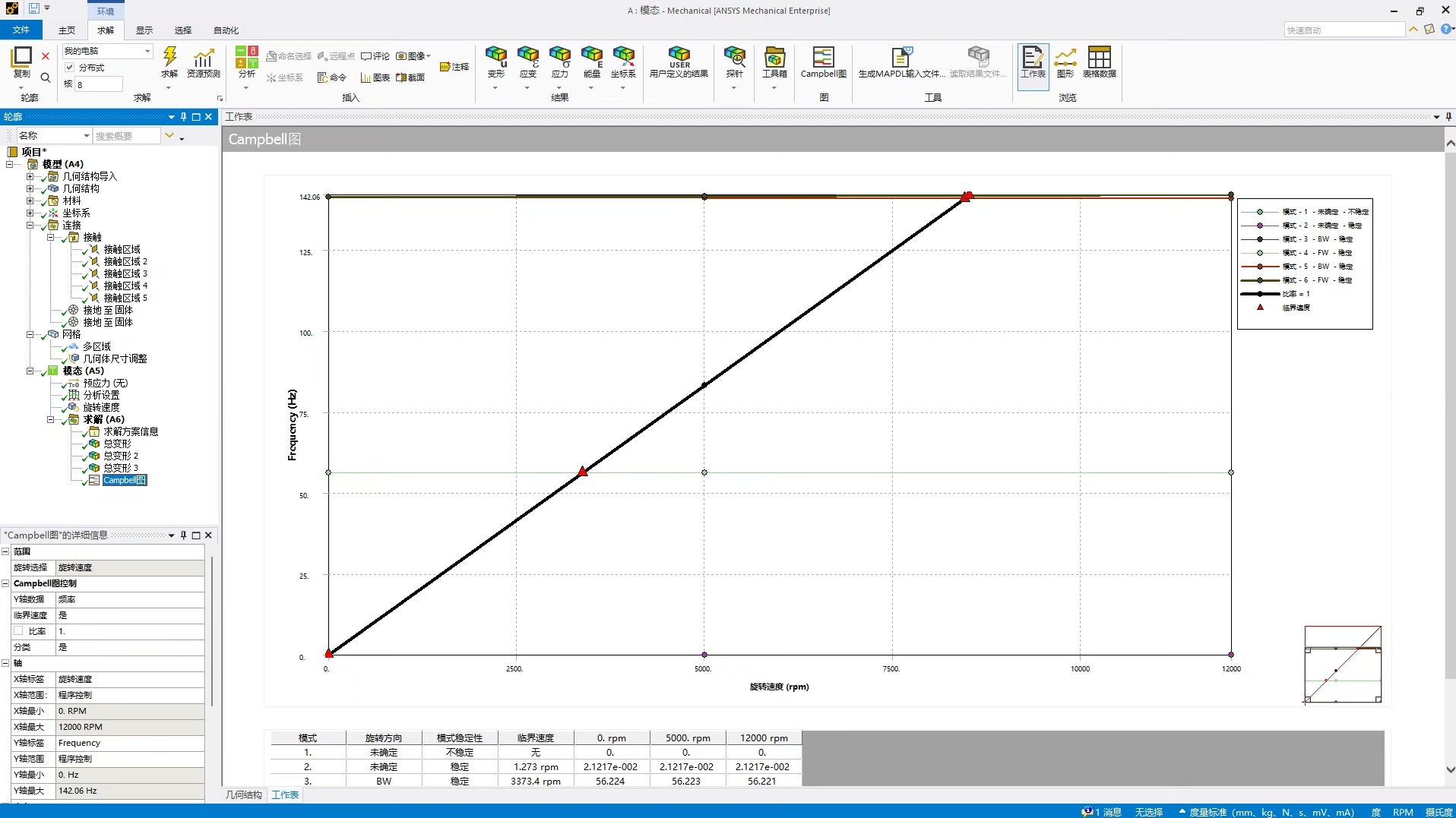
在Workbench后处理里点几下生成这个神器,你会看到三条妖娆的曲线:蓝色的是固有频率随转速变化,红色的是1倍频线,绿色的是2倍频线。在工厂里那台嗡嗡作响的鼓风机又双叒叕出问题了,轴承温度异常升高时老师傅叼着烟说了句:"这转子怕是遇上临界转速了"。就像相亲照和真人差距太大,模型和实物之间,永远隔着一条叫"简化假设"的鸿沟啊。这时候要特别注意第三阶模态,它的频率线刚好在3000转时和1倍频线亲密接
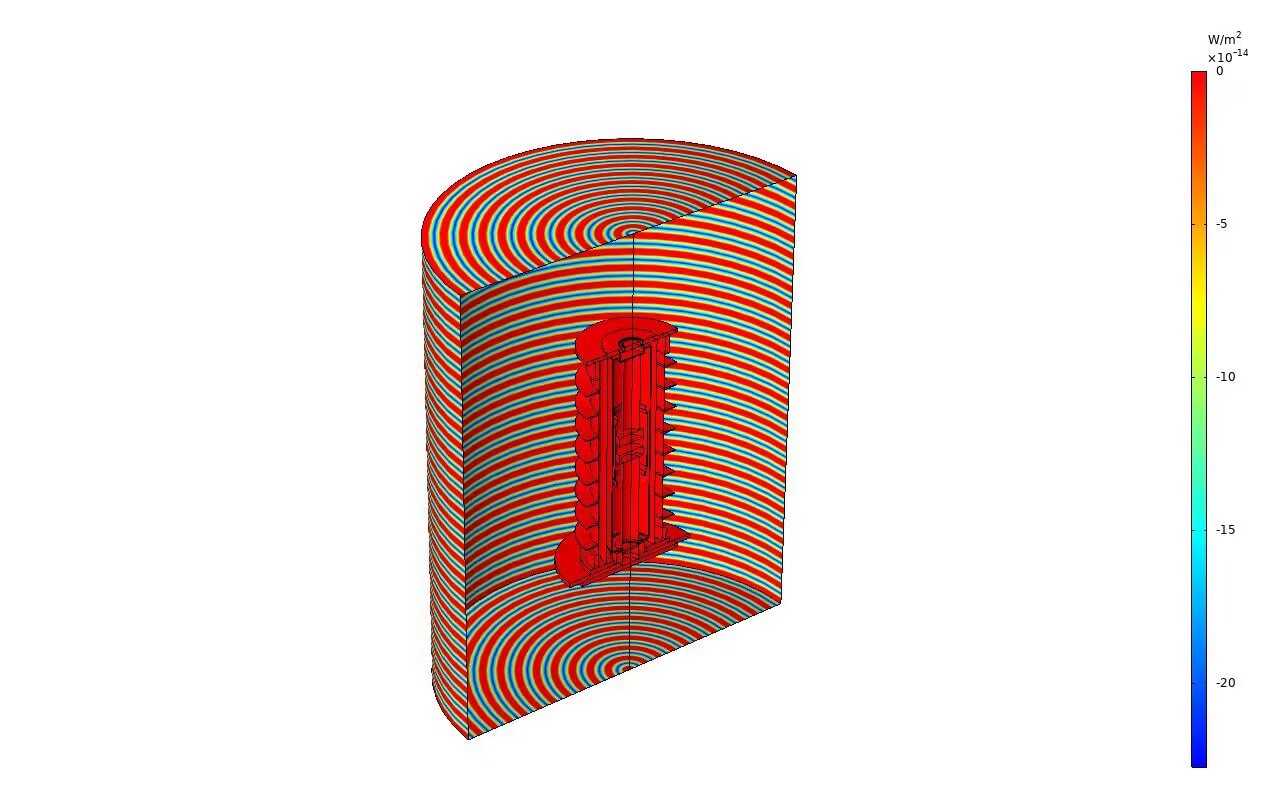
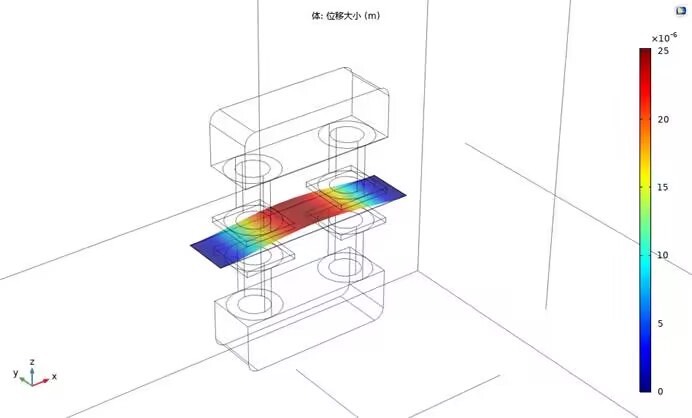
某个起重机电磁铁案例中,正是这种方法发现了边缘磁通集中导致的应力峰值,避免了原型机的结构失效。比如电磁制动器、感应加热设备的设计,核心需求就是计算铁板内部电磁力的分布。最后别忘了力结果的单位校验——遇到过因为模型尺寸单位设置错误,导致电磁力被放大1000倍的惨案。comsol感性线圈对铁板电磁力的计算模型,可以得到铁板内部的电磁场和电磁力的分布,comsol感性线圈对铁板电磁力的计算模型,可以得到
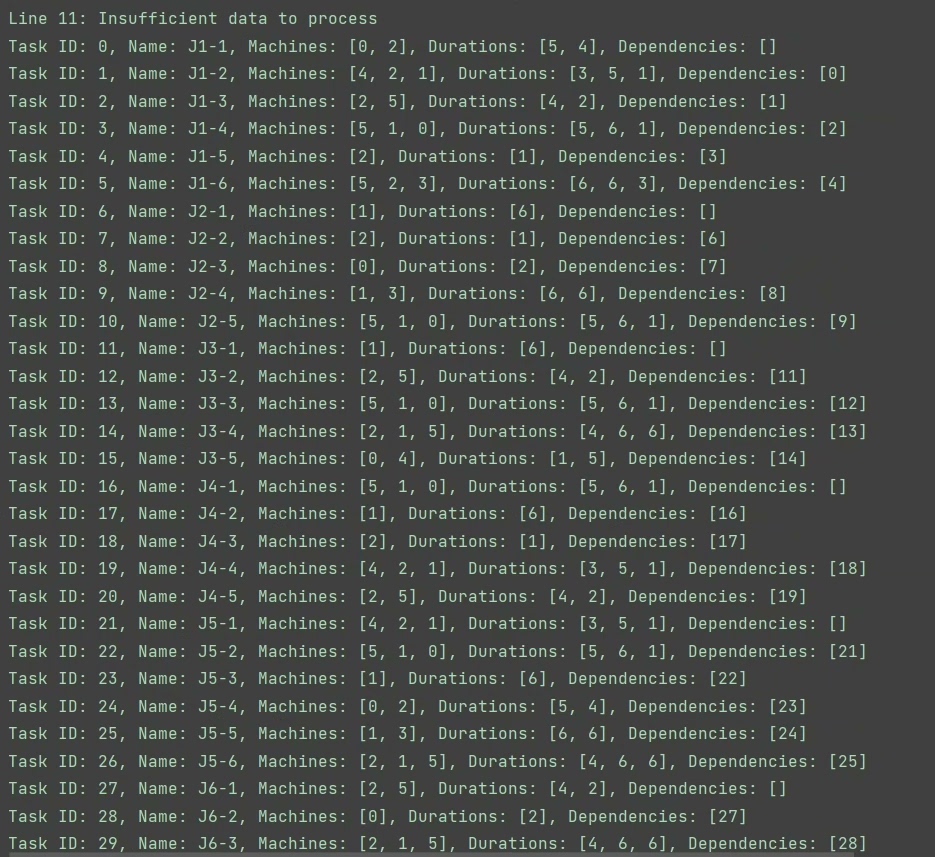
PPO,DQN,强化学习进行柔性车间调度,重调度,fjsp,djsp,jsp均可做算法改进,创新点。在当今制造业不断追求高效与灵活性的大背景下,车间调度问题(Job Shop Scheduling Problem,JSP)及其延伸的柔性车间调度问题(Flexible Job Shop Scheduling Problem,FJSP)、动态车间调度问题(Dynamic Job Shop Schedu
CPF(三次相位函数):是后面ICPF和CICPF方法的基石,不过这里先不展开,重点放在后两者。ICPF(积分三次相位函数):通过对信号进行积分操作,利用三次相位函数的特性,在一定程度上能够有效估计LFM信号参数,尤其对多分量情况有较好处理能力。CICPF(相干三次相位函数):进一步在ICPF基础上考虑了信号的相干性,在多分量LFM信号分析上更胜一筹。
总的来说,基于单点预瞄的轨迹跟踪控制算法是一个非常适合新手入门的算法。通过Simulink和CarSim的联合仿真,可以直观地看到算法的效果,同时也能深入理解PID控制的基本原理。如果你对车辆控制或者轨迹跟踪感兴趣,强烈推荐从这个算法入手,相信你会收获颇多!
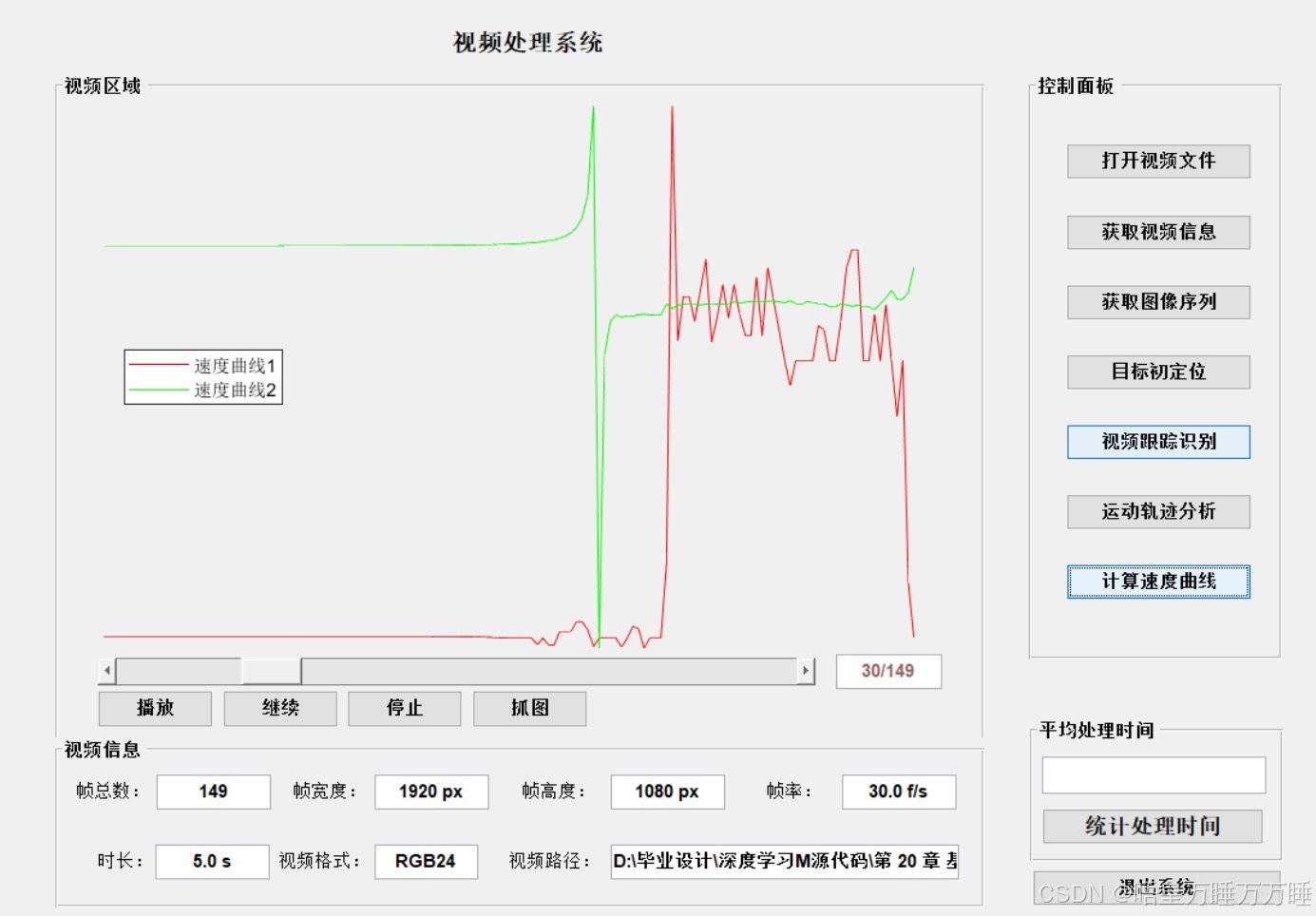
基于帧间差法的视频分割算法具有直观实用的特点,对光照变化不敏感,但也存在一些局限性,如对目标的检测准确性和对快速或缓慢运动目标的处理困难。基于帧间差法的视频分割算法具有直观实用的特点,对光照变化不敏感,但也存在一些局限性,如对目标的检测准确性和对快速或缓慢运动目标的处理困难。目标提取:根据一定的条件和规则提取出目标区域,如目标的大小、形状、连通性等。目标跟踪:在连续的视频帧中跟踪目标的位置和形状,
最后可视化的时候,把流速矢量图和温度等值线叠在一起,效果堪比赛博朋克版的地下迷宫。记住:仿真结果和现场监测对不上号时,先检查边界条件是不是设成了理想状态——现实世界可没有Ctrl+Z。冻融循环导致的支护结构应力集中,用移动网格配合变形几何模块,能看见钢筋像弹簧一样抽搐。热耦合部分别偷懒,土体导热系数要是设成常数,仿真结果绝对比甲方画的饼还假。说到土石坝渗流,最骚的操作是在坝体里埋虚拟传感器。COM

通过上述接线、参数设置以及程序编写,我们成功实现了三菱FX5U与三菱E700变频器的modbus通讯,并结合昆仑通态触摸屏实现了丰富的控制和监控功能。这种组合在工业自动化场景中有广泛应用,希望这篇博文能为大家在类似项目中提供一些参考和帮助。三菱FX5U与三菱E700变频器通讯程序(SL5U-23)通讯说明:用三菱FX5U的PLC实现与三菱E700变频器modbus通讯器件:三菱FX5U PLC,三

通过采用先进的技术和方法,我们实现了高中低速电梯的混合运行、检修功能、WinCC画面操作以及多用户登陆等功能。这些功能的实现不仅提高了电梯的运行效率和稳定性,还为用户的操作和管理带来了极大的便利。在逻辑算法赛道的背景下,我们的系统设计需要满足各种运行条件,包括检修、wincc画面操作等,同时具有高度的稳定性和安全性。此外,我们还需实现advance wincc profession的多用户登陆功能

跑出来的结果其实挺直观的:电场云图里伞裙的尖端会有明显的高亮区,也就是电场集中的地方,温度云图里也是这里温度最高,比芯棒主体高个8-12℃,和实际运行里伞裙尖端先老化的情况完全对上。要是想优化绝缘子结构,还可以用参数化扫描改伞裙的弧度,看哪个形状能把电场集中的问题压下去,温升自然也就降下来了。其实这个模型改改参数就能套用到不同电压等级的绝缘子上,比如换个半径、改一下电压,就能算10kV的柱式绝缘子